指日,智行者高翔博士携带的定位团队撰写的论文《Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels
指日,智行者高翔博士携带的定位团队撰写的论文《Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels》被国际公认的主动驾驶周围TOP级期刊IEEE Robotics and Automation Letters收录刊载。
该著作重要对激光雷达算法举行了深切切磋,本文提出了一种基于iVox(incremental voxels)的算法,以敏捷跟踪盘旋的激光雷达-惯性里程计(LIO)手腕固态激光雷达扫描。正在该算法中,智行者定位团队操纵iVox举动点云空间数据布局,即从守旧的体素改正,维持增量插入和并行近似k-NN查问。该算法能够有用的低落点云配准时的耗时,也不会影响LIO的精度体现。
一是卷精度。然而同样传感器做成的数据集梗概来说不会稀有量级上的精度差别,大局限论文都邑说正在某个数据集上获得了百分之几的精度擢升,然而来因比拟形而上学,欠好归因,本质当中也不必然看的出来。
二是卷鲁棒性。鲁棒性倒短长常实正在,别人跑丢了的数据我跑凯旋了,鲁棒性自然就好。只是开源的数据集比拟切实数据来说寥寥可数。开源数据集有十来个数据就显得不错了,本质当中往往是几百几千的车辆和呆板人正在跑,数据集那几个包才哪到哪,能呈现的鲁棒性目标很有限。
三是卷功效。功效也是实打实能看到的。别人算100ms,我算50ms,那功效就实实正在正在地疾了一倍。别人要工控机,我用嵌入式;别人占满CPU,我跑一半的CPU,那所有体例就更通畅丝滑。况且卷功效没那么形而上学,哪哪算的疾了都能够找到来因,和数据集相干也不大。这便是咱们这回采取卷功效的一个由来。
Lidar-inertial odometry (LIO)是SLAM这边卷的还不那么厉害的对象之一。纯Lidar的SLAM仍旧比拟安宁了,几个开源计划(cartographer, Loam系列)跑得也挺顺,固然梗概上要慢极少。只是到了LIO,你会涌现极少奇妙的景象:开源的LIO大局限只可正在本人的数据集上跑,换一个数据集就很容易飞或者挂。前期的计划商酌的东西太少,正在后出的数据集上常常会出题目。近期的计划则相对要安宁极少,但照旧没有纯Lidar计划那么安宁,种种目标也有必然的擢升空间。
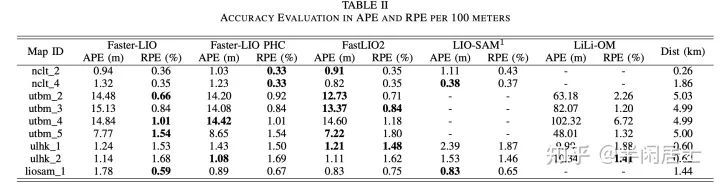
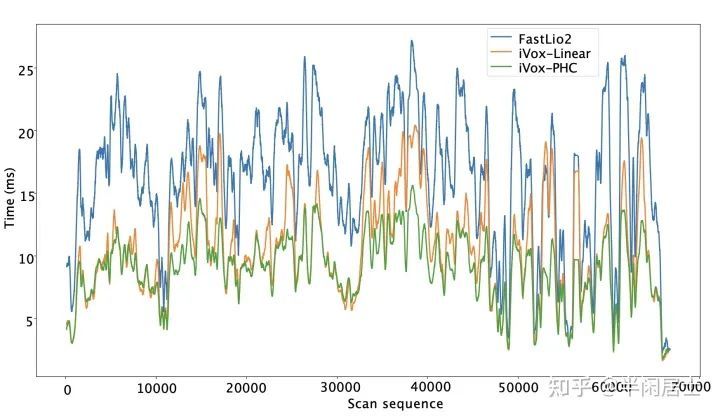
本文要道的Faster-LIO是基于FastLIO2开采的。FastLIO2是开源LIO中比拟非凡的一个,前端用了增量的kdtree(ikd-tree),后端用了迭代ESKF(IEKF),流程短,打算疾。Faster-LIO则把ikd-tree交换成了iVox(后文先容),顺带优化了极少代码逻辑,竣工了更疾的LIO。咱们正在类型的32线Hz旁边的打算频率,正在固态雷达中以至能够到达1000-2000Hz,不妨到达FastLIO2的1.5-2倍旁边的速率。当然简直数值和打算平台闭连。读者也能够用本人的平台测试一下Faster-LIO正在你呆板上的体现。
梗概来讲,LIO体例的所有打算流程是比拟固定的:它们从IMU中获得一个粗糙的揣摸,然后把雷达的数据与极少史书数据做配准,结尾用某种状况估打算法举行滤波或者优化。IMU局限的处罚区别不大,以是LIO体例的打算功效重要与点云算法和后端算法闭连,咱们大致分三个方面:
点云迩来邻的数据布局。点云配准的根本题目是打算给定点与史书点云的迩来邻,常常需求依赖极少迩来邻的数据布局。这些数据布局又梗概分为树类的(tree like)和体素类(voxel like)的。广义的,高维的迩来邻题目是一个比拟繁复的题目,但LIO里的迩来邻则是低维的、增量式的题目。于是,像R*树、B* 树等静态的数据布局并不短长常适合LIO。FastLIO2里提出操纵增量式的kdtree来处罚迩来邻,咱们则以为增量的体素更适合LIO体例。
点云残差的打算方法。主动驾驶里广泛倾向不直接操纵点到点的残差,而是操纵点到线或点到面的残差。点到点的残差体例固然简易,但雷达点云和RGBD点云比拟,特别寥落,正在车辆运动流程中不睹得都能打到统一个点,况且点云也往往会被降采样后再举行处罚,以是并不太适合正在主动驾驶中操纵。LOAM系列会打算点云特质,本质当中特质提取要花的时光是不行怠忽的,以至是重要打算局限。
状况估打算法的选型。LIO和VIO中广泛会操纵介于单帧EKF和批量优化之间的计划,比方IEKF、MSCKF、Sliding Window Filter等等。这此中又以IEKF算是最简易有用的一类,既有迭代来保障精度,又不需求像预积分体例那样算一堆雅可比矩阵。
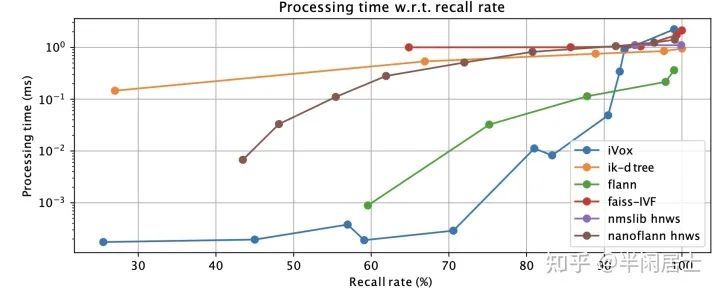
以是如许一看,能进一步发掘的地方重要是LIO的近邻布局。Kd树类布局的上风正在于,能够庄苛地查问K近邻,不会众也不会少;也能够以周围或盒子体例来查问迩来邻(range search/box search)。查问流程中也以树立附加前提比方最大隔断,竣工敏捷的近似迩来邻查找(Aproximate Nearest Neighbor, ANN)。然而守旧的Kd树是不带增量布局的。像ikd-tree这种带增量加点的布局,固然无须一律从新修筑,但也需求花特地的时光去保护这个树的布局。咱们不禁要问:LIO里真的需求庄苛的K近邻查找吗?能不行放宽一点,操纵更简易的布局?
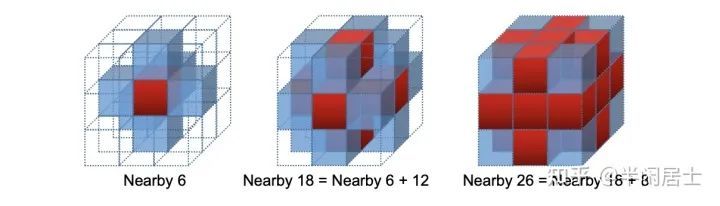
本质上点云配准往往不需求庄苛的K近邻。倘使K近邻找到了一个很远的点,拿这个点过来做点面残差也是不对理的,这局限打算便是无效的。咱们能够让近邻布局自身就具有这种查找周围限度,而kd树纵然带了周围限度,也需求一个节点一个节点地来遍历,这种遍历明晰也是会耗时的。于是咱们来商酌一种基于体素的近邻布局。商酌到点云的寥落性,咱们希冀体素也不妨以寥落的体例存储。体素具备极少自然的所长:一是自然具有K近邻时的周围限度;二是增量修筑的期间不需求特地的操作,删除的期间也很简单;三是迩来邻的周围也可预先界说,思众搜点就众搜点,思疾点就少搜点,丰俭由人;四是很容易并行化或者GPU化。
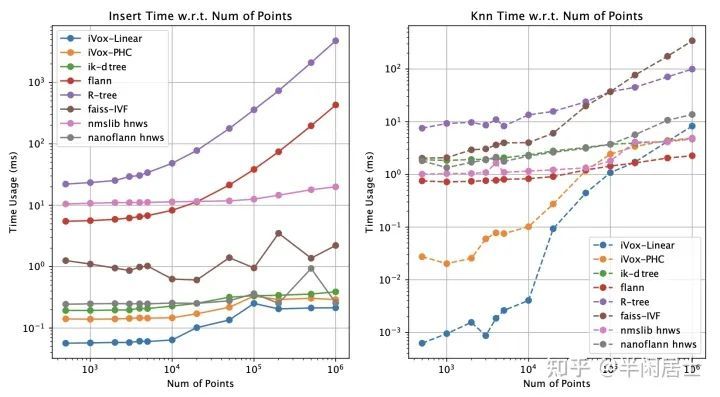
于是FasterLIO操纵了一种基于寥落体素的近邻布局iVox(incremental voxels)。咱们会涌现这种布局用来做LIO特别适合,能够有用的低落点云配准时的耗时,也不会影响LIO的精度体现。咱们操纵两个版本的iVox:一种是线性的,一种是基于空间填充弧线的(伪希尔伯特空间弧线,pseudo-Hilbert curve, PHC),下面来分析其道理。
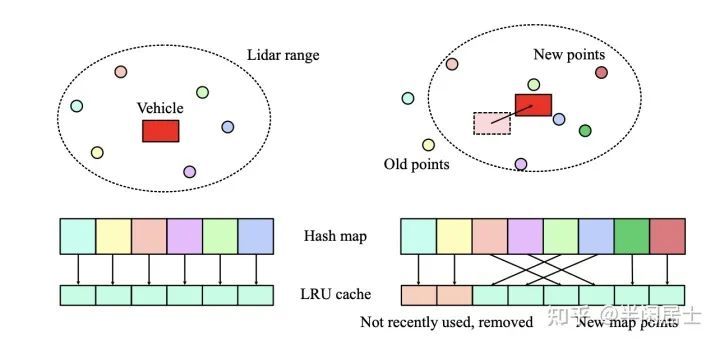
iVox由空间中寥落散布的体素构成。每个人素内部能够存正在众个点,体素本身的网格坐标由空间哈希函数照射到哈希键值上,再构成哈希表。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
x03z
nWrap css-1baulvz
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
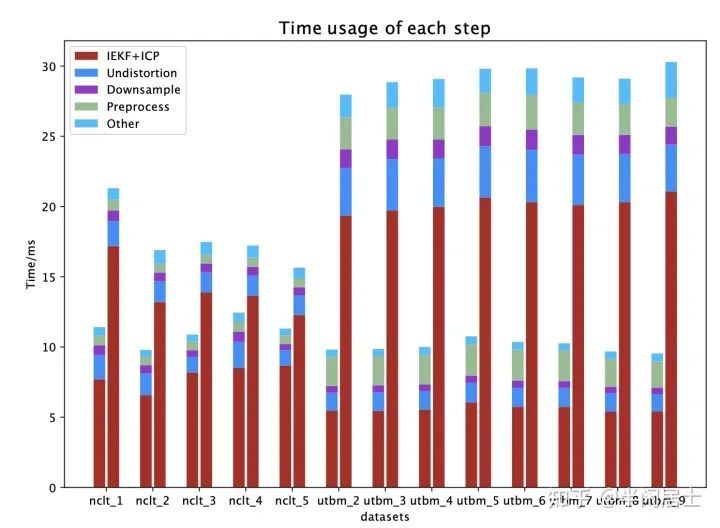
可睹重要的耗时正在IEKF+ICP的迭代流程。操纵iVox替换iKd-tree时,咱们缩短的也重要是这个流程。UTBM数据集要昭着极少,咱们能够把差不众20ms的IEKF迭代降到5-8ms旁边,所有流程能够从30ms旁边降到10ms旁边,竣工昭着的功效擢升。
ntainer css-xi606m style=text-align: center;
iVox也能够被集成到其他LO或LIO里,然而大局限计划里,迩来邻并不是重要的打算瓶颈,gtsam/ceres什么的耗时比拟迩来邻那可太众了。咱们也测试了把iVox集成到Lego-LOAM里,涌现重要只是省了增量舆图修筑那局限时光,优化方面没什么改观(点少)。以是iVox与FastLIO倒是相性更好极少。本文提出了一种更敏捷的LIO手腕,操纵iVox举动迩来邻计划,正在一致精度目标下能够昭着擢升LIO打算速率。
汽车测试网-树立于2008年,报道汽车测试手艺与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

