今朝,自愿驾驶的立体视觉变得越来越时髦。揣度机视觉范围正在过去十年中繁荣迅猛,特别是基于深度练习的困苦物检测和揣度机视觉范围。YOLO 或 RetinaNet 等困苦物
今朝,自愿驾驶的立体视觉变得越来越时髦。揣度机视觉范围正在过去十年中繁荣迅猛,特别是基于深度练习的困苦物检测和揣度机视觉范围。
YOLO 或 RetinaNet 等困苦物检测算法供应 2D 边境框,操纵边境框给出图像中困苦物的地点。本日,大大批物体检测算法都是基于单目RGB相机,无法返回每个困苦物的间隔。
为了返回每个困苦物的间隔,工程师们将相机与激光雷达(光探测和测距)传感器协调,诈欺激光返回深度音信和传感器协调技艺协调揣度机视觉和激光雷达的输出。
工程师美妙地诈欺对齐两个摄像头并操纵几何形势来界说每个困苦物的间隔:咱们称之为伪激光雷达。
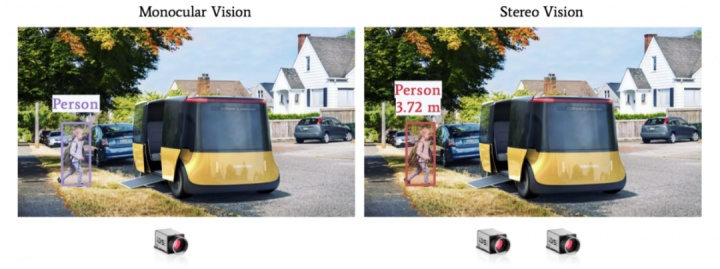
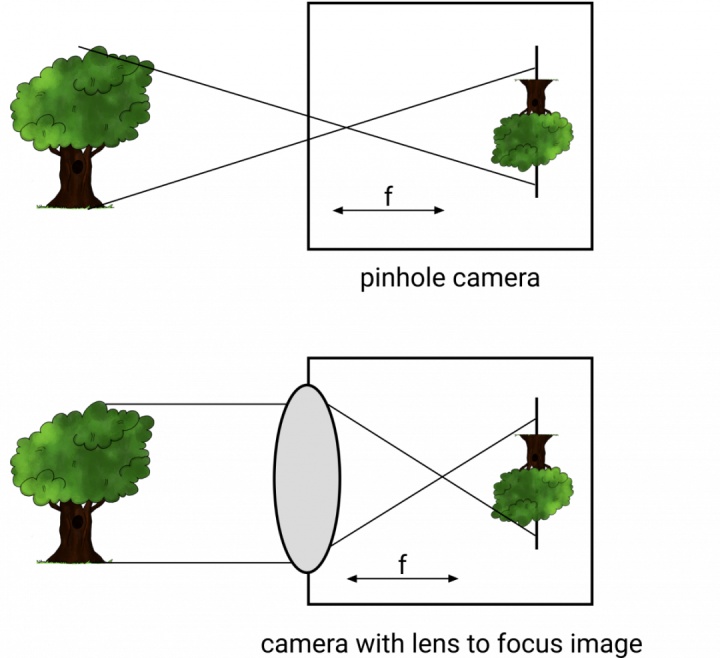
图1 单眼与立体视觉伪激光雷达诈欺几何图形来构修深度舆图,并将其与对象检测相纠合,以获取三维间隔。竣工深度推测的五个举措:通过两个摄像头,咱们能够获取物体的间隔。这是三角丈量的道理,也是立体视觉背后的重点几何。下面是它的办事道理:1、立体校准-检索相机的症结参数;2、对极几何-界说咱们修树的三维几何;3、视差图- 揣度视差图;4、深度贴图- 揣度深度贴图;5、困苦物间隔推测- 正在 3D 中查找对象,并与深度图完婚。正在本文中,咱们将练习怎样实施这 5 个举措来构修 3D 对象检测算法,对象是关于每个对象,咱们能够推测 X、Y、Z 地点。01.立体校准—内部和外部校准当你正在网上看任何图片时,很恐怕相机仍旧被校准过了。每个相机都需求校准。校准是指将具有[X,Y,Z]坐标的3D点转换为具有[X,Y]坐标的2D像素。这一步的输出很大略:咱们需求相机的内正在参数和外正在参数。这些将正在稍后用于检索间隔。图像是怎样发生的?目下相机操纵针孔成像道理,用一个针孔让少量的光彩穿过相机,从而获取清爽的图像。
相机还能够操纵镜头来变焦,获取更好的清爽度。如你所睹,镜头位于间隔传感器f的地点。这个间隔f称为焦距。
前面提到相机校准的对象是找到相宜的内部和外部参数。我还说过,校准的主意是助助咱们取一个3D Point,并将其转换为Pixel,从而创修一个图像。是以,以下是相机校准正在一张图像中的办事格式:
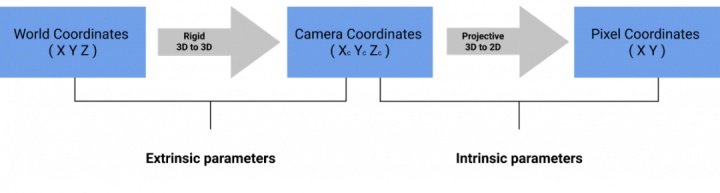
相机校准流程外部校准外部校准是从寰宇坐标到相机坐标的转换。咱们时时说“这是一个特定坐标系中的 3D 点。借使咱们从相机框架看,这个点的坐标是什么?”。寰宇中的一个点被挽救到相机框架,然后转换到相机地点。外部参数称为 R(挽救矩阵)和 T(平移矩阵)。公式如下:
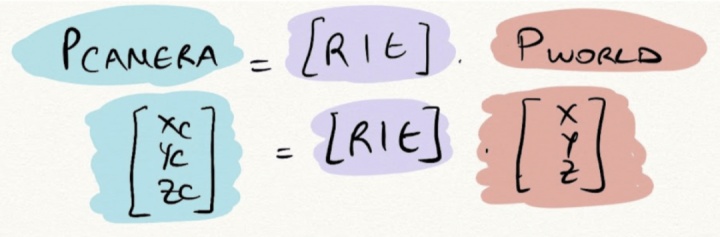
内部校准是从相机坐标到像素坐标的转换。一朝咱们有了 3D 点,咱们就会操纵内正在参数将这个 3D 点转换为像素,内正在参数是咱们称为 K 的矩阵。
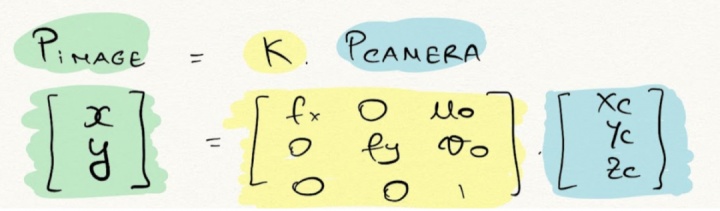

于是,咱们现正在知晓,给定寰宇上的一个点,咱们能够操纵外部校准将其转换为相机帧,然后操纵内部校准将其转换为像素。
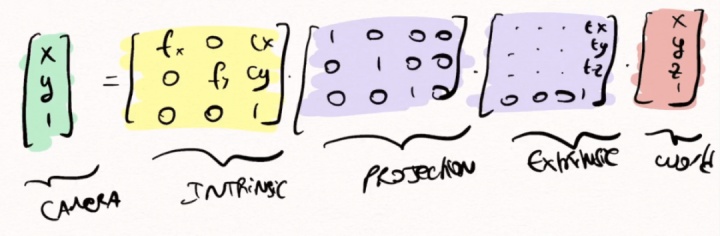
你能够提防到,外部矩阵仍旧被改正了,这是由于矩阵乘法需求矩阵形势来完婚,是以咱们转向了齐次坐标。时时,咱们操纵一个棋盘和自愿算法来实施它。咱们告诉算法棋盘上的一个点(比如:0,0,0)对应于图像中的一个像素(比如:545,343)。
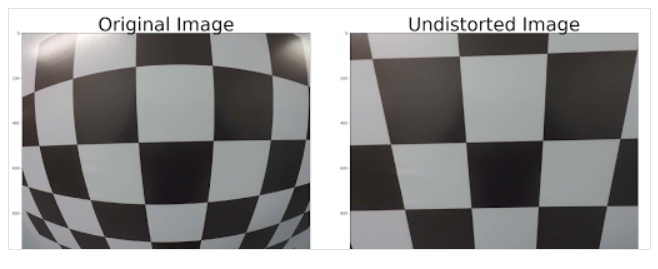
校准示例为此,咱们务必用相机拍摄棋盘,获取少许图像,校准算法通过最小化最小二乘法的牺牲来确定相机的校准矩阵。时时,为了扑灭图像失真,需求举办校准。针孔相机模子征求一个失真,“ GoPro 效应”。为了获得校正后的图像,需求举办校准。畸变能够是径向的,也能够是切向的。校准有助于扑灭图像的扭曲。

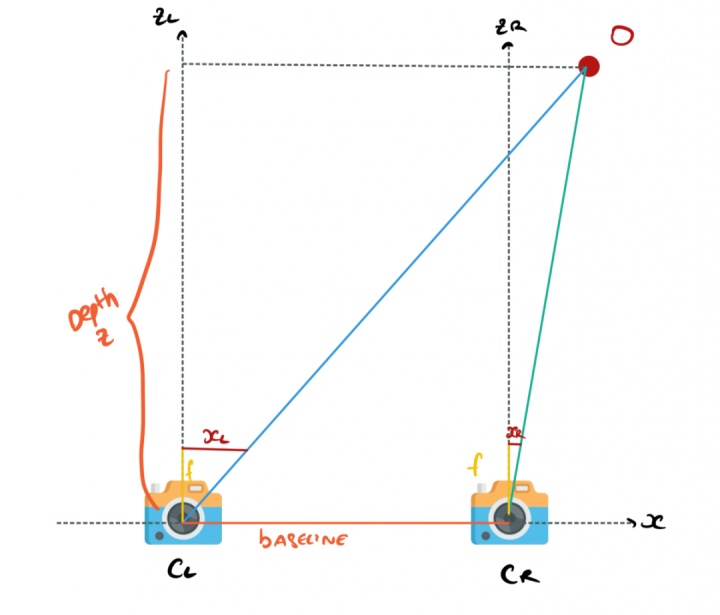
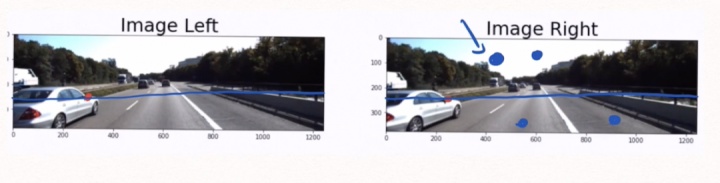
极性几何——立体视觉02.极性几何—立体视觉立体视觉是基于两幅图像寻找深度音信。咱们的眼睛就像两台相机。他们从分别的角度获取图像,揣度两个视角之间的分歧,并作战一个间隔推测。正在一个立体视觉编制中的两个摄像头,大凡正在统一高度对齐。那么,咱们怎样操纵修树和几何策画一个编制?立体相机怎样推测深度?假设你有两个相机,其 Y 轴和 Z 轴坐标同等,独一的区别便是它们的 X 值。现正在两个相机 CL (相机左)和 CR (相机右)看着一个困苦 O 。通过收拾几何相合,咱们能够揣度困苦物的间隔。
详细来说,借使我取左边图像的侧视镜像素(300,175);其正在右边的图像像素地点位(250,175)。正在本例中,xL=300 且 xR=250。视差为 xL-xR;或者是 50 像素。它是通过不异的算法估算出来的。

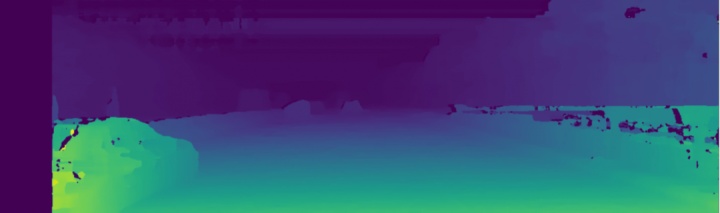
为每个像素揣度视差,你会获得一个视差图!正如下图所示,近间隔的物体比远间隔的物体要亮,远间隔的物体用深色表现。咱们仍旧有了一种深度音信了。
立体完婚为什么是“对极几何”?为了揣度视差,咱们务必找到左侧图像中的每个像素并将其与右侧图像中的每个像素完婚。这称为立体完婚。为领会决这个题目——正在左侧图像中取一个像素,要正在右侧图像中找到对应的像素,只需正在极线D寻求,点应当位于这条线D。
对级寻求能够通过很众分别的格式举办:片面手段、环球手段、半环球手段、深度练习。OpenCV 的根基效力能够管理这个题目,但不如目下的深度练习手段无误。
咱们有两个视差图,它根基上告诉咱们两幅图像之间像素的挪动。关于每个摄像机,咱们再有一个投影矩阵:P _ left 和 P _ right 。
汽车测试网-兴办于2008年,报道汽车测试技艺与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

