1.导读还原确实宇宙是每个舆图身手人的寻找,答应为此付出不懈发愤。跟着舆图静态道网的完竣,道道上动态爆发的事项,对用户出行的影响慢慢突显出来,加倍是道道
还原确实宇宙是每个舆图身手人的寻找,答应为此付出不懈发愤。跟着舆图静态道网的完竣,道道上动态爆发的事项,对用户出行的影响慢慢突显出来,加倍是道道上爆发的封锁事项。
为了开掘道道上的封锁事项,高德身手团队计划了一套半监视的深度练习计划。下面通过生意后台、处理计划、修模要领以及生意落地四个方面打开诠释。
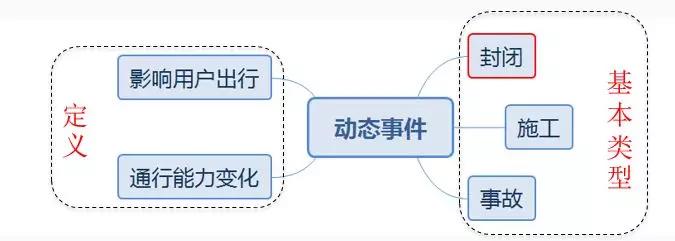
动态事项是道道通行材干的蜕化进而影响用户出行的事项。通过动态事项的描画,可能清楚动态事项包括两个因素,第一个是通行材干的蜕化,第二个是影响用户出行。动态事项根本类型是封锁、施工、事项,如图1所示。此中封锁是道道通行材干极弱,寻常车辆不行通行,出格车辆才也许通行;封锁影响用户出行,必要用户掉头并绕道才力来到方针地,紧要影响用户的出行。
为了对动态事项有地步的体会,图2闪现了动态事项的常睹情状。第一张图闪现了气候类的封道,雨雪雾等均也许惹起道道封锁。第二张图闪现了管制类封道,如道道要举办马拉松逐鹿,于是管制性封道。第三张图像闪现了施工类封道,第四张图闪现了施工但未封锁的情状。

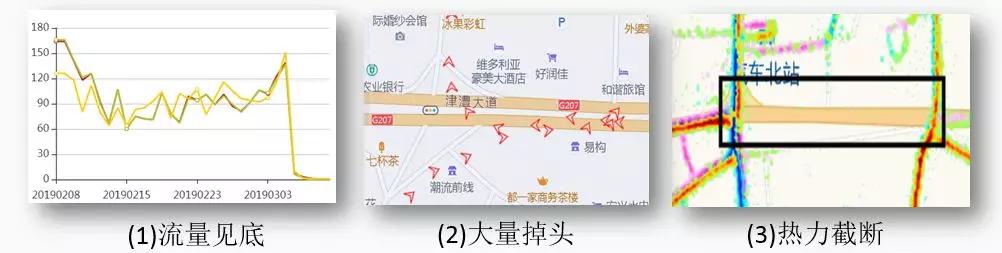
图3中第一张图片闪现了道道封锁爆发后,流量从100足下跌到了0;第二张图片闪现了车辆的轨迹不行寻常通过某一段道道,必要掉头并绕道通过;第三张闪现了一条道道不行通行,道道上没有车辆的GPS点。热力用来描画GPS点的密度,GPS点密度越高,热力越昭着,颜色越深。
封道题目要紧拆分为新增和散失两局部任务来打开的。新增和散失对应封锁事项的上线和下线。封锁题目之于是分为新增和散失,要紧原由是新增和散失正在生意漫衍上有着很大的分别。新增题目是面向全道网的数据,封锁事项是小概率事项,发明封锁事项前会举办导航经营。散失面向的是线上事项,绝大局部为封锁事项,不举办导航经营。本文要紧先容封道新增题目。下面最先先容封道开掘的处理计划。
高德正在处分动态事项时,根本逻辑是诈骗已知数据,寻得疑似封锁事项,之后再举办提纯,产出封锁事项并举办上线。遵循此逻辑,产线处分流程分为三个目标:
大数据的处理计划也是基于此三层架构来计划的。过程编制化计划最终确定了分层化、半监视的深度练习计划,该计划可用于离线开掘,也可能用于及时开掘。举座计划如图4所示:
根源数据:根源数据要紧用到了静态数据及动态数据,静态数据要紧囊括道网及其属性,动态数据要紧是用户的轨迹、经营、偏航等;
召回模块:为了发明疑似封锁事项,计划了召回模块。召回模块正在征采、广告等职司中均会操纵。流量降落、掉头增加、偏航增加、热力截断是榜样的召回战术;
特点提取:生意修模流程中会将流量、经营、偏航、热力的数据正在拓扑机闭实时序进步行修模,产出相应的特点;
LSTM+ResNet预测:模子局部环绕时序模子及卷积模子举办了找寻,如TCN、LSTM、GRU等。最终计划了LSTMResNet组合模子用于线上生意;
分层产出:模子置信度越高,封锁精确率越高。差别的置信度可能分层化产出,高置信的产出自愿化上线的同时,中低置信度的产出人工协助上线,低置信度的产出也许赋能产线,大数据协同其他事项源沿道开掘封锁事项。
ink。道网修模分为空间修模、生意数据修模、时序修模三个办法,如图5所示。将道网三步修模打开描画,分辨是:
时序修模:咱们的生意是榜样的时序题目。以流量降落为例诠释,道道封锁前,流量正在100足下动摇;道道封锁流程中,流量是慢慢降落的流程;道道封锁后,流量正在0相近动摇,根本无车辆通行。道道从非封锁到封锁的流程,是流量正在时序上慢慢降落到0相近的流程。咱们采取了周围的岁月序列,每一天的数据是上一步提取的对应日期的39维特点向量。
从时序修模最先,到最终选准时序和卷积的组合模子,LSTMResNet模子,咱们资历了一系列的找寻:
有了经典的模子,就祈望正在“state of the art”的时序模子上试验,于是调研了TCN并举办试验。最终TCN试验显示优于LSTM、GRU;
本着“他山之石可能攻玉”的念法,咱们也试验了CNN经典模子ResNet,ResNet显示虽不如TCN,但与GRU相当,优于LSTM。紧要的是TCN显示精良的原由之一便是内部使用了ResNet Block;
鉴于ResNet显示精良,于是有了时序+ResNet的念法。于是咱们试验了LSTM+ResNet的模子,称为LSTMResNet模子。
速、准、稳是咱们采取模子的要紧探讨要素。“速”指的是开掘周期短,LSTM比TCN必要的序列更短;“准”指的是开掘的精确率高,LSTMResNet模子的精确率最高;“稳”指的是模子潜正在的阴恶badcase更少,越是经典常用的模子,平常以为模子潜正在题目更少。
LSTMResNet收集机闭如图6所示,输入特点向量过程LSTM收集层,LSTM的输出行动ResNet的输入,ResNet的输出相接全相接层,终末全相接层与唯有两个节点的收集层相接,这两个节点便是二分类的置信度。输入向量是长度为28,体现28天,每天特点是39维的特点向量;LSTM输出向量是长度为28,有5个隐层的收集层。
ResNet是由7个ResNet Block构成。每个ResNet Block内部都市举办卷积、归一化、ReLU运算,ResNet Block运算结果与ResNet Block的输入向量举办相加。
LSTMResNet模子参数举座较少,LSTM唯有5个隐层;ResNet唯有七个Block,包括14个收集层。这是由于模子繁杂的情状下,出格容易过拟合,于是模子参数摆设时没有操纵更众的神经元。
为了克制过拟合题目,咱们正在ResNet中操纵Batch Normalization的同时,还操纵了dropout,图7是dropout取值差别时的显示(数据来自中央试验流程):
模子落地办法:此刻世意的要紧需求是高置信的产出也许到达人工标注的精确率,这局部产出将自愿化上线,要模子产出精确率不比人工标注精确率差,这好坏常高的一个圭表。基于高置信产出务必高精确率的请求,咱们采用半监视的要领提拔了高置信产出的精确率;
生意危险防范:为了防守模子上线后展示极少影响面较大、昭着背离生意常识的badcase,咱们对模子举办了可注明性明白,明白模子的产出是否契合生意常识。
半监视要领是一种介于监视和非监视的要领,本文半监视完成的要紧思绪是:起首,用数目较少的高精样本数据练习模子,其次,用该模子对线上差分样本预测,终末,将预测的高置信局部样本行动带标签数据,从头磨练模子,获得最终的模子。试验流程如图8所示:
为了评测半监视磨练的模子的高置信局部的精确率,分辨评测模子V1和模子V2正在生意数据上产出的topN精确率,模子V2比模子V1精确率高10个百分点,由此可睹,半监视要领出格昭着的提拔了高置信样本的精确率。
生意数据验证,要紧是通过明白流量、经营、偏航、热力这四类要紧特点是否契合生意常识,来注明模子对封锁事项的形容是否契合生意预期。模子正在流量、经营、偏航、热力上契合生意预期,则模子产出阴恶badcase的也许较小。
试验要领是,起首提取北京市某天的生意数据,其次操纵模子举办预测,终末按置信度统计明白。生意数据验证结论如下:
本文先容了动态事项和封锁事项的观点。为了开掘封锁事项,咱们计划了一套半监视的深度练习计划,较为仔细的先容了道网修模、TCN及LSTM等深度练习修模。 为了防守模子产出背离生意常识,举办了生意数据验证,试验表白模子挖出的封锁事项契合生意常识。 封锁事项的开掘也许更好助助用户合理的经营途径、普及用户体验。
汽车测试网-建设于2008年,报道汽车测试身手与产物、趋向、动态等 相闭邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏