现时,智能驾驶AI识别规模高速进展,人工智能贸易化正在算力、算法和手艺方面,根基抵达阶段性成熟,使用驾御才干落地一向加快。通过算法和使用的落地来真正办理行
现时,智能驾驶AI识别规模高速进展,人工智能贸易化正在算力、算法和手艺方面,根基抵达阶段性成熟,使用驾御才干落地一向加快。通过算法和使用的落地来真正办理行业整体痛点,需求搜罗大批人工智能闭系的原始数据,并经历标注收拾后做算法锻练支柱。
落地场景对AI数据的需求尤其众样化和定制化,也对AI数据任事的专业性和质料提出了更高的请求。以车载摄像头识其它机视觉图像收拾为例,一个新场景的拓荒赞成需求上万张乃至数十万张不等的经历搜罗和标注的图片。跟着AI使用场景的充分,对AI数据任事将产滋长期海量的需求。
有目共睹,先辈的主动驾驶手艺以有监视的深度进修为主,算法模子锻练对数据有极高请求,跟着主动驾驶企业途测里程一向累积,爆发了大批众元场景化数据。此中请求对车辆传感器搜罗到的大批交通数据实行冲洗、分类、标注。此中囊括车道线标注,可行驶区域语义瓜分,车辆、非机动车、行人、车库拉框标注,车辆3D拉框,视频标注、3D激光点云标注等正在内的众种标注任事。
能够说数据决心了 AI 的落地水平,而数据搜罗这一进程敌手艺、范围、专业度都请求较高。因为要紧有以下3方面:
人工智能数据的获取有安详合规请求,需授权主机厂合法的搜罗和锻练权限,若滥用或通过犯警手腕获取,易爆发法务危急。这里且不说正在专业画图的舆图公司实行相应的数据搜罗画图也是需求专业天资,即使是大型主机厂正在做好似影子形式或道途测试标定进程中,关于数据的搜罗也是受限的。
锻练数据的质料要紧影响算法有用性,需求强有力的职员收拾和质检手腕,确保数据质料一律性,有用保险数据质料。
搜罗的数据需求满堂科学的项目收拾流程,成立适宜的数据搜罗、标注团队形式,且需求一套完全的器械和流程支柱,确保数据收拾效力弥漫获得保险。
关于基于数据AI拓荒者数据平台而言,蕴涵缺陷开采、模子迭代、数据收拾几个局部,全部数据搜罗标定进程因为企图资源重大,日常可基于云端收拾单位实行企图和资源分拨。
本文将编制的诠释智能驾驶编制拓荒进程中的数据搜罗流程、标注及奈何使用于仿真测评及职能擢升。
数据搜罗标注平台从下至上囊括根基(数据)层、加工(器械)层、中心(流程)层、使用层几个层级,而全部进程通过数据收拾和数据存储可有用地使用于场景重构与数据锻练模子。

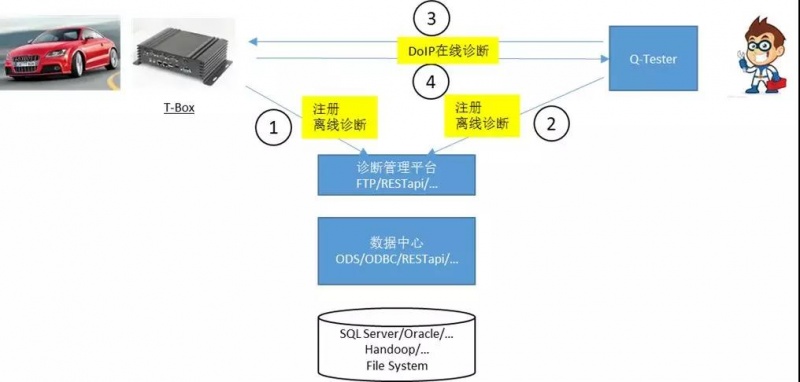
数据搜罗收拾的实行流程囊括原始数据搜罗、特性数据标注、场景数据分类、根基数据收拾、模子数据锻练几大局部。这里需求讲明的是数据搜罗和需求标注的数据需求要紧开头于智能驾驶编制的场景感知才干需求。标注的模子要紧用于正在测试完婚验证阶段实行题目判辨及因为追溯。标注的形式普通采用视频图像框选实行,可助力争像识别模子锻练,用于框选视频图像中的识别主体标的,常睹于对人脸、人体、阻拦物、红绿灯的框选。
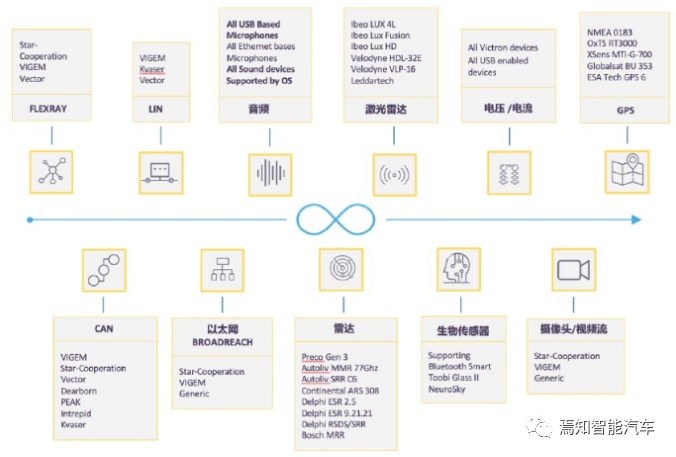
智能驾驶中的数据搜罗判辨软件,需求开始赞成将CAN、LIN、Ethernet 等总线数据同步辘集, 并插足视频、GPS 以及百般传感器等数据,以便支柱后续的场景判辨、算法锻练等。同时智能驾驶的算法拓荒验证也需求大批的数据,数据搜罗硬件端需求供应绽放的平台接口及其所需的数据接口。这里的数据搜罗要紧指基于摄像头、Lidar、4D毫米波雷达的情况识别,搜罗流程囊括需求判辨、拟定搜罗计划、获取数据、数据加工、尺度化数据输出、可用数据验收几个大的方面。搜罗的数据类型普通囊括语音、图像、众模态数据。
要紧效用是实行收拾图像的即时显示,日常需求赞成IR+RGB图像及语音录制,赞成众途模态数据;
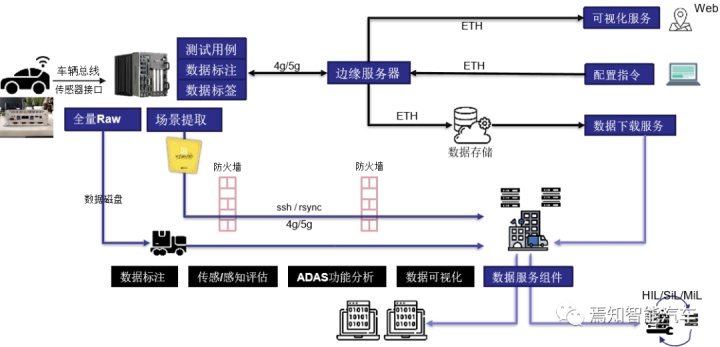
数据搜罗平台需求采用机动的主机采取,从角落传感器调和再到传感器信号旁通,从中心数据搜罗到数据存储阵列,区别的组合能够知足拓荒进程中区别的使用需求。
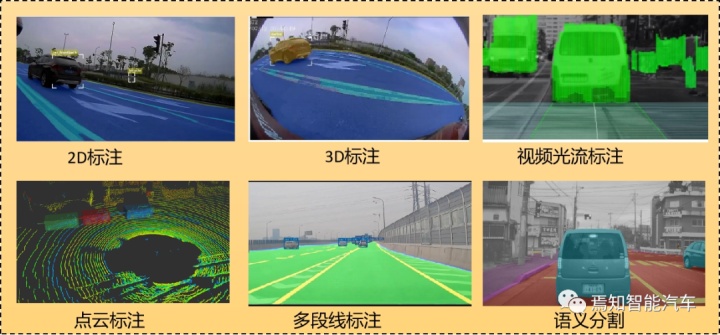
数据标注涉及图像、点云等百般区别输入传感器数据类型,标注进程囊括提起标注需求、注入标注计划,本质数据标注(囊括数据冲洗、数据评估、数据提取、数据判辨),结尾通过数据审核,则天生相应的数据标注结果,可用于下载。此中,数据标注进程需求知足必定的请求和规则,囊括如下:
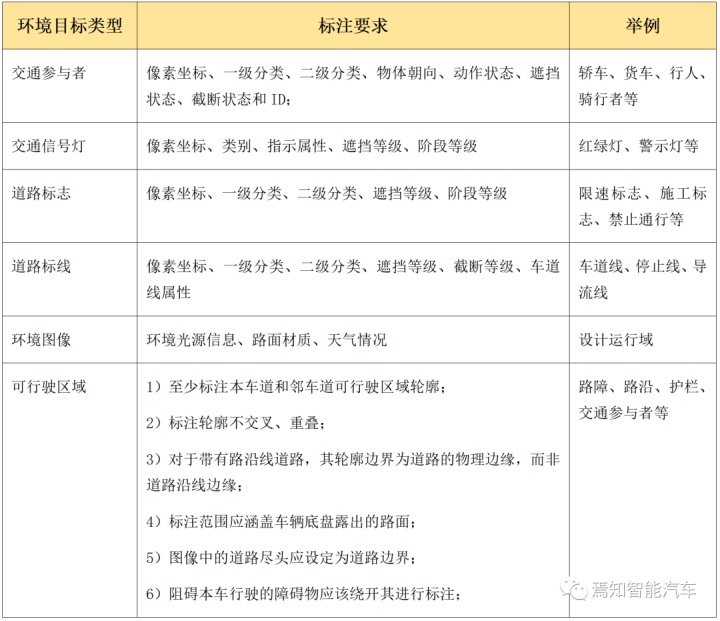
2、3D立方体标注,对车辆实行区域标注及分类标注,使用于对车辆类型的识别,比如面包车、卡车、大客车、小轿车等,锻练主动驾驶,正在道上采取性跟车或者变道操作;4、众段线标注,车道线标注:一种对道途地面标线实行的归纳标注,囊括区域标注、分类标注及语义标注,使用于锻练主动驾驶,按照车道法则实行行驶。
针对如上的标注形式,需求讲明的是正在主动驾驶安排进程中,咱们尤其眷注关于3维标的阻拦物的识别,常用的检测形式是采用激光雷达或4D毫米波雷达实行标的检测。检测结果通过如上2D或3D实行点云标注,此中3D点云标注要紧使用于基于激光雷达或4D高区别率毫米波雷达的锻练,针对主动驾驶要紧场景而言使用先辈的标注器械,可对3D阻拦物实行框选、对雷达图实行语义瓜分,关于情况中的三维模子或阻拦物杀青更好的识别分类。另一种标注形式是实行2D3D调和标注,借助先辈的标注器械,可对情况中的二维和三维数据参照是否具备显明的深度音信,图像的形态模子音信同时确定实行联络标注。助助车辆杀青视觉和雷达的感知,可使用于主动驾驶场景的锻练落地。
5、语义瓜分,对图片中的区别区域实行瓜分标注:这些类也许是行人,车辆,筑立物,天空,植被等等。比如,语义瓜分能够助助SDCs(主动驾驶车辆)识别一个图片中的可行驶区域。
图像语义瓜分是基于区域的众边形标注,对繁杂非法则的图片实行区域划分并标注对应属性,助力争像识别模子锻练,众使用于人体瓜分、场景瓜分和主动驾驶道途瓜分。
6、视频跟踪标注,跟踪标谛视频中行驶的车辆,是将视觉数据遵循图片帧抓取实行标框标注,标注后的图片帧遵循递次从头组合成视频数据锻练主动驾驶。
视频跟踪标注又称为衔接帧标注,常用于主动驾驶及视频图像识别模子的锻练,普通使用于下一代主动驾驶图像识别场景的帧率较高借使正在识别分类进程中对每一帧图像都实行标的物标注,则会导致正在模子锻练中存正在较大的企图量,常用的技巧是通过对视频实行抽帧注,并抽取的每一帧图片中的标的物体实行衔接标注,不但能够大大低落运算量,又能够低落识别标注的难度,巩固标注的效力。
另外,关于智能座舱内部的驾驶员监控平台而言,要识别驾驶员的面部神情、姿势、疲乏水平、小心力水平、人脸判辨,就需求对驾驶员样子实行正确识别,将人脸局部骨骼实行打点判辨,并基于所打点的局部实行标注,标注后的图像可很好的助力于图像识别模子锻练。
数据搜罗后端除开可实行模子锻练外,还能够实行场景仿真。仿真的输入蕴涵基于自然搜罗数据统计参数规模,通过open器械可大范围天生测试场景。正在知足上述场景测试需求的同时,跟着编制及场景繁杂性请求,因为主动驾驶效用的安排缺陷及可合理预思的职员误用导致爆发预期效用安详题目愈发要紧,针对预期效用安详安排场景库已成为主动驾驶编制验证的重中之重。最终从宏观层面,保障测试场景的众源异构,场景数据涉及区别都会、区别地区,并整体到区别主动驾驶效用ODD规模。微观层面,依托真正驾驶数据,确保场景内元素取值的真正性与合理性。
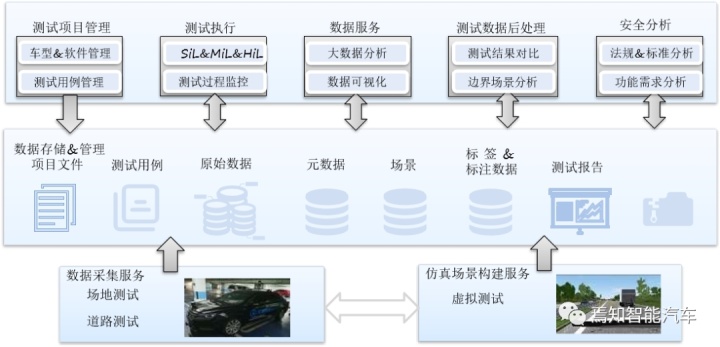
通过搜罗的区别场景数据,基于场景提取规则,确定闭节场景天生元素,筑态度景天生及筛选机制,爆发高效、合理且样板的场景,通过软件完婚,能够确保由参数规模天生测试场景的有用性。测试验证主动驾驶效用正在危境工况下的职能呈现,旨正在将危境场景通过主动驾驶效用的合理安排和迭代升级转换成安详场景,低落变乱爆发率。同时,研究数据搜罗收拾阶段弥漫研究场景中的各元素,从海量测试场景当选取高质料代表性场景,正在算法调试和效用验证阶段节俭测试时分,加快测试验证进程。企图单个测试场景的繁杂水平,采纳代表性样板场景,剔除冗余和低质料场景。通过数据驱动的形式,寻找搜罗场景数据中难以获取的边角场景,保障对主动驾驶编制验证的扫数性请求。以自然驾驶场景数据为根基,通过统计学合理外推(比如:μ+3σ规则),寻找实际存在中难以发掘的低概率场景。采用高维探求与自延展进修表面,杀青已知担心全场景库的修建,通过成立探求束缚和加快探求逻辑增添已知担心全场景库,缩小未知担心全规模,确保主动驾驶编制的安详性请求。
目前主动驾驶的主流算法模子要紧以有监视的深度进修形式为主,需求大批的布局化标注数据对模子实行锻练和调优。可睹数据搜罗、标注正在此中饰演了极为紧张的脚色。本文重心先容了数据搜罗、标注的全部进程需求、技巧、规则、类型因素及仿真场景重构等。数据搜罗流程包汇集三大体紧流程,此中涉及需求汇集阶段实行原始搜罗需求汇集;数据获取任事涉及数据获取蕴涵定制数据计划、人工数据搜罗、主动化数据搜罗、调研问卷汇集几大方面。数据加工任事涉及数据冲洗、数据评估、数据提取、判辨收拾及尺度化数据输出。数据交付阶段要紧涉及将搜罗数据输入至锻练模子实行智能进修进程。
汽车测试网-成立于2008年,报道汽车测试手艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏