摘要:为加快试验认证周期、低落试验本钱,采用了基于众体动力学的虚拟载荷天生措施及其数据经管流程,搭筑了悬架编制道道模仿试验台架,分手实行了基于虚拟载荷
为加快试验认证周期、低落试验本钱,采用了基于众体动力学的虚拟载荷天生措施及其数据经管流程,搭筑了悬架编制道道模仿试验台架,分手实行了基于虚拟载荷和基于试车场确实载荷的耐久试验。通过耐久试验零件失效形式与失效发作功夫的比拟阐发,验证了基于虚拟载荷的悬架道道模仿试验措施的有用性。
布局耐久职能是车辆最首要的职能之一,也是整车开采中最症结的症结之一。为了敏捷考试悬架的布局耐久职能,开采出了台架道道模仿试验措施,其试验装备以MTS329众轴道道模仿试验机为代表。过去几十年行业内遍及将试车场道道数据收集的载荷行动台架试验的载荷源,然而这种措施因为引入了试车场道道数据收集,于是台架道道模仿试验不得不推迟到工程样车筑制竣工之后实行。若台架道道模仿试验的载荷根源可能脱节试车场道道数据收集,则台架道道模仿试验可起码提前半年实行,能有用缩短编制级和整车级台架布局耐久试验的周期。
跟着谋略机时间和虚拟仿真时间的进展,众体动力学软件已能无误模仿车辆正在试车地方受的载荷,所以,可将该载荷行动台架道道模仿试验的载荷源[1]。美国通用汽车公司正在众年前就下手扫描试车场3D道面[2],并将数字道面导入众体动力学软件中,天生用于台架道道模仿试验的虚拟载荷信号,正在骡子车阶段齐全代替了试车场道道数据收集[3]。欧洲车企也能愚弄虚拟载荷实行前期零部件级试验,但对悬架或整车级众轴道道模仿试验使用较少。MTS公司维系本身的时间上风,开采出了一套HSRC(hybrid system respo
nse convergence)羼杂试验措施,采用虚拟轮胎模子和道面模子与本质台架和车辆相维系的形式,也无需试车场道道数据收集[4]。国内绝大无数整车厂目前依旧采用试车场道道数据收集的载荷行动台架道道模仿试验的载荷源。极少学者专家考试通过筑造虚拟试验台预测零部件的劳累寿命[5-6],但这些措施依旧无法脱离试车场道道数据收集,要是虚拟试验台的载荷能来自于虚拟仿真阐发,则结果会明显降低。鉴于此,国内各整车厂持续下手扫描试车场道面,天生虚拟道面模子用于仿线]采用插值措施编程实行了三维虚拟道面重构,并琢磨发明弧线法例格栅(CRG)花式的道面具有更高的谋略结果。孙成智等[8]通过试车场扫描,筑造了3D数字道面模子,导入整车模子后能有用实行载荷预测。
本文中详明阐述了基于虚拟载荷的前悬架和后悬架台架道道模仿试验措施,先容了虚拟载荷天生措施及其数据经管流程,并正在国内初度将虚拟载荷胜利使用于物理台架道道模仿试验,通过比拟物理试验的失效结果验证了此试验措施的有用性。
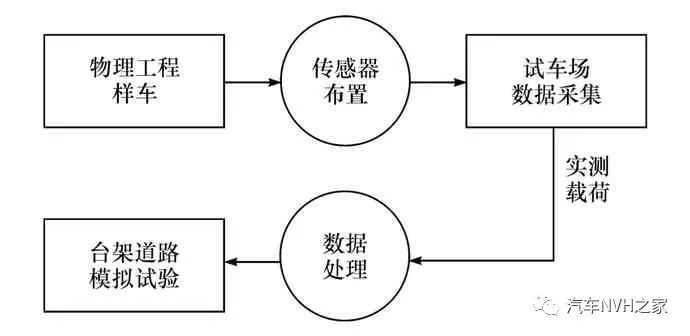
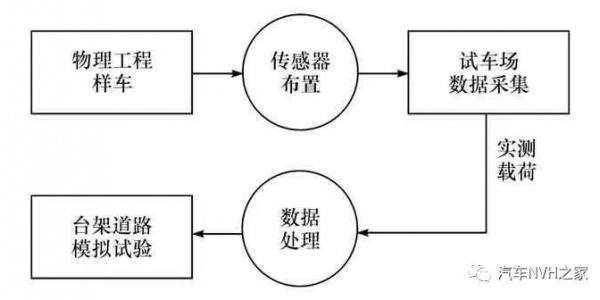
古代基于试车场道道载荷的台架道道模仿试验措施如图1所示,正在试车场道道数据收集之前,须对物理工程样车的症结零部件贴应变片,需要时还须正在车身和轴头安置加快率传感器、正在轮心安置六分力衡量轮等。工程样车正在试车场采谱时,受天色、道面、驾驶员和车辆本身形态等条款的限定,往往必要亏损很长功夫。采谱经过一齐中断之后,能力实行数据经管和台架道道模仿试验。
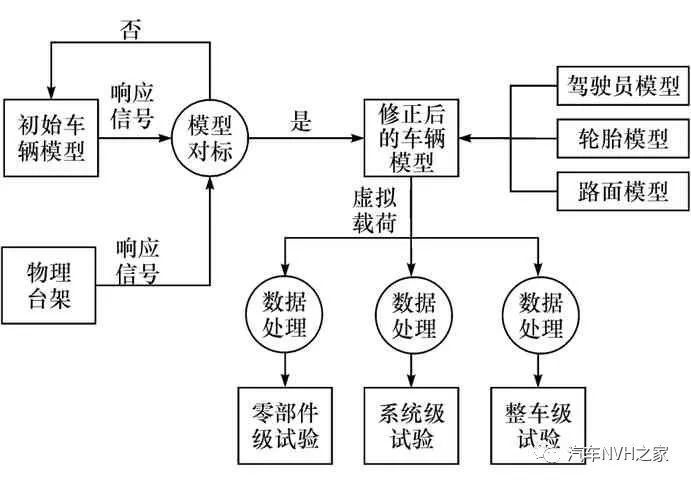
基于虚拟载荷的台架道道模仿试验齐全省去了试车场道道数据收集这一症结,试验载荷来自于虚拟仿线示出此试验措施的根基流程。模子对标蕴涵静态对标和动态对标,个中静态对标是正在不异驱策下将K&C试验台的反应信号与初始车辆模子反应信号实行对标,而动态对标则是基于众轴道道模仿试验台。若初始车辆模子的反应信号和台架的反应信号不同较大,则须进一步厘正模子,若初始车辆模子的反应信号与台架反应信号一概,则该模子可用来天生虚拟载荷。维系驾驶员模子、该车型对应的轮胎模子和试车场3D数字道面模子,愚弄众体动力学软件可输出虚拟载荷功夫经过。通过数据经管将虚拟载荷转化成迭代宗旨信号,可实行零部件级试验、编制级试验和整车级试验。因为篇幅限定,本文中仅计划悬架子编制的试验措施。
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
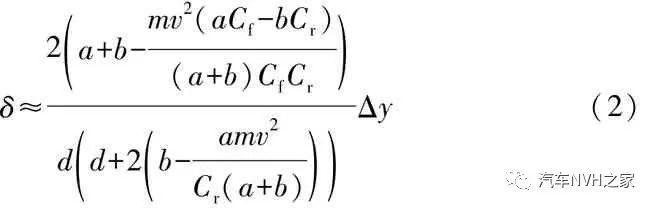
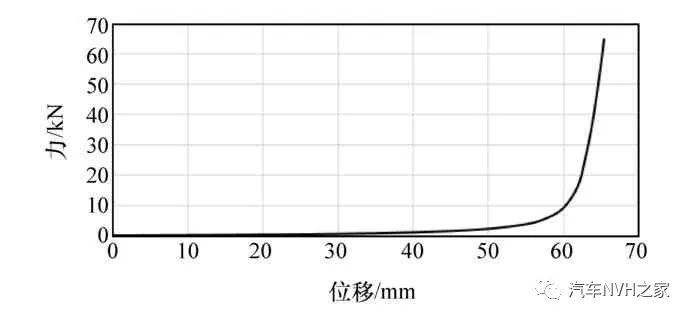
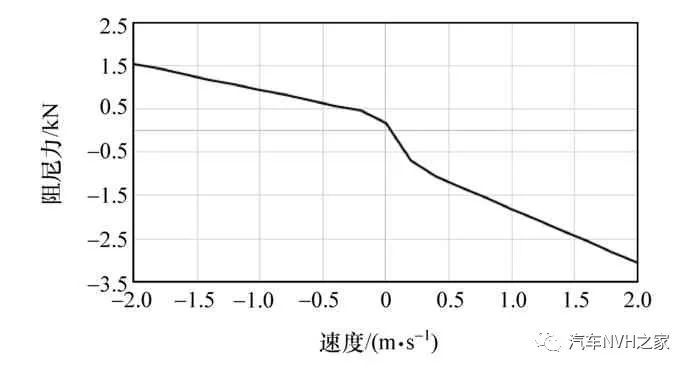
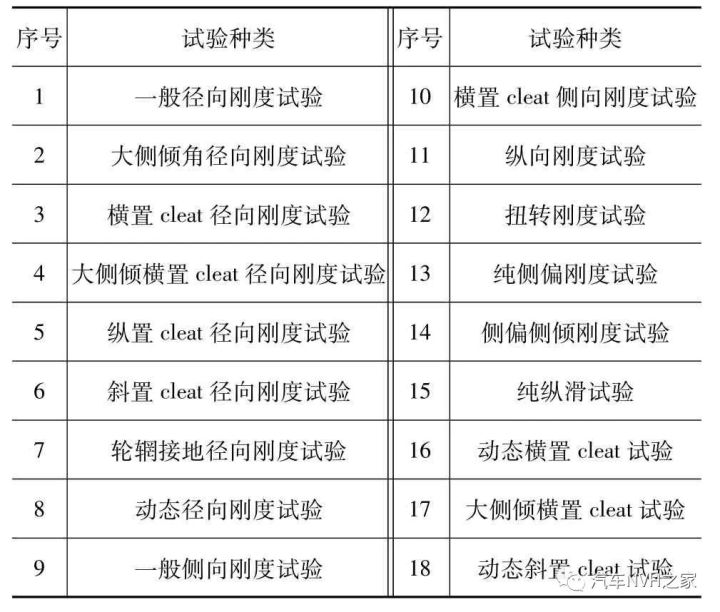
式中:a为整车质心至前轴的隔绝;b为整车质心至后轴的隔绝;m为整车质地;v为车辆行驶速率;C f为前轴侧偏刚度;C r为后轴侧偏刚度;d为前视隔绝;Δy为即时形态横向位移偏差,即轨道偏差。车辆模子基于硬点数模坐标、衬套刚度弧线、缓冲块刚度弧线、减振器阻尼性子弧线等参数筑造,个中前缓冲块刚度弧线所示,前减振器阻尼性子弧线所示。轮胎模子采用基于柔性环假设的3D非线性FTire模子,仿线 Hz,且能经管极其粗略的道面特色。通过众品种型的轮胎性子试验获得其力学性子数据,采用配套辨识器材实行轮胎模子参数辨识。表1详明列出了必要实行的轮胎性子试验品种。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
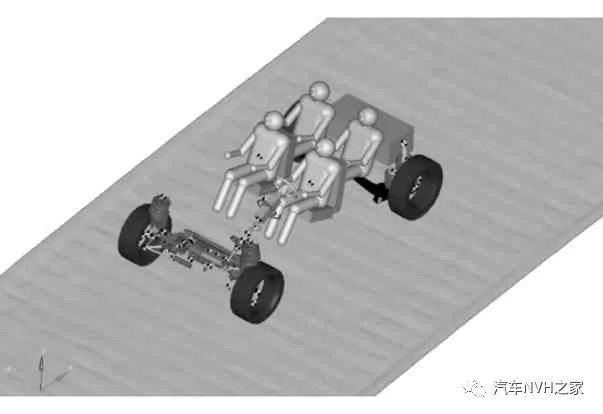
将驾驶员模子、轮胎性子文献、虚拟道面模子与车辆模子集成,组成完全的虚拟模子,实行仿真阐发,天生虚拟载荷。图5映现了Motion View中的虚拟模子。
ntainer css-xi606m style=text-align: center;
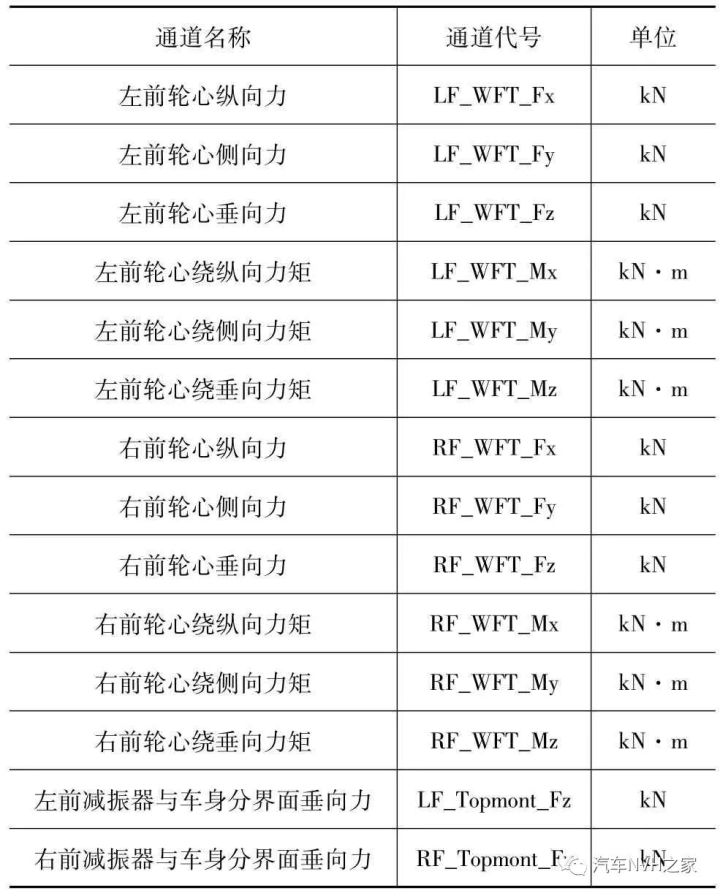
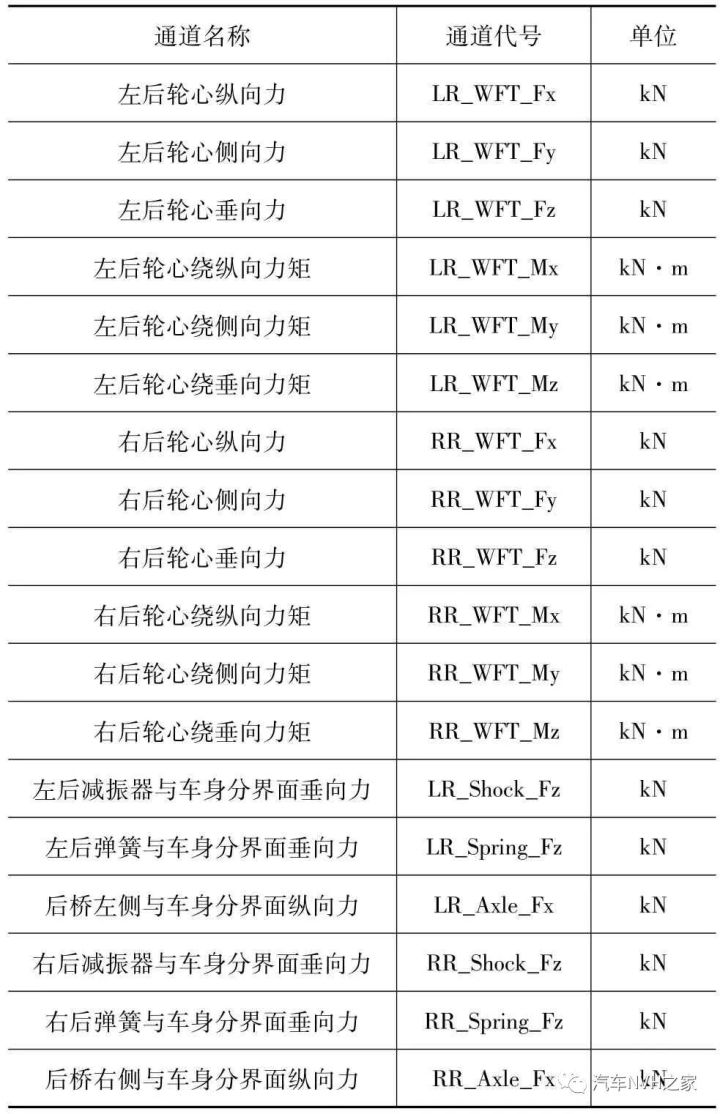
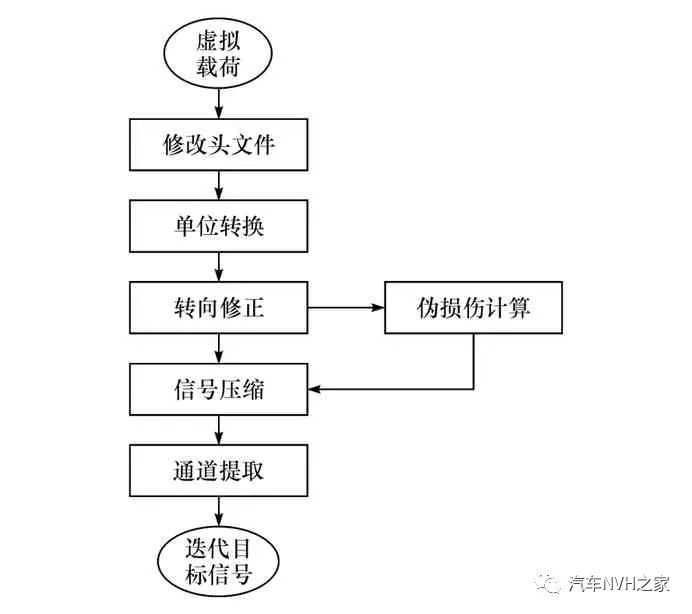
关于由众体动力学软件天生的虚拟载荷,须优秀行数据经管,能力获得迭代宗旨信号,用于台架试验迭代。表3和表4分手列出了前、后悬架编制的虚拟载荷通道。数据经管的流程如图6所示,起首修削虚拟载荷信号的头文献,使时域诀别率、频域诀别率、通道名称和通道程序等满意试验请求。关于模子与台架单元界说分歧的通道,须对其实行单元转换。因为试验台架绕Z轴的转角很小,无法全数模仿车辆正在试车场的转弯运动,试验时将车辆转向机锁死正在中心位子,只模仿绕Z轴的力矩,并不模仿绕Z轴的运动,所以须对虚拟载荷信号实行转向厘正,厘正公式为
ntainer css-xi606m style=text-align: center;

式中:Fx,Fy分手为厘正前的轮心纵向力和侧向力;Fx E,Fy E分手为厘正后的轮心纵向力和侧向力。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
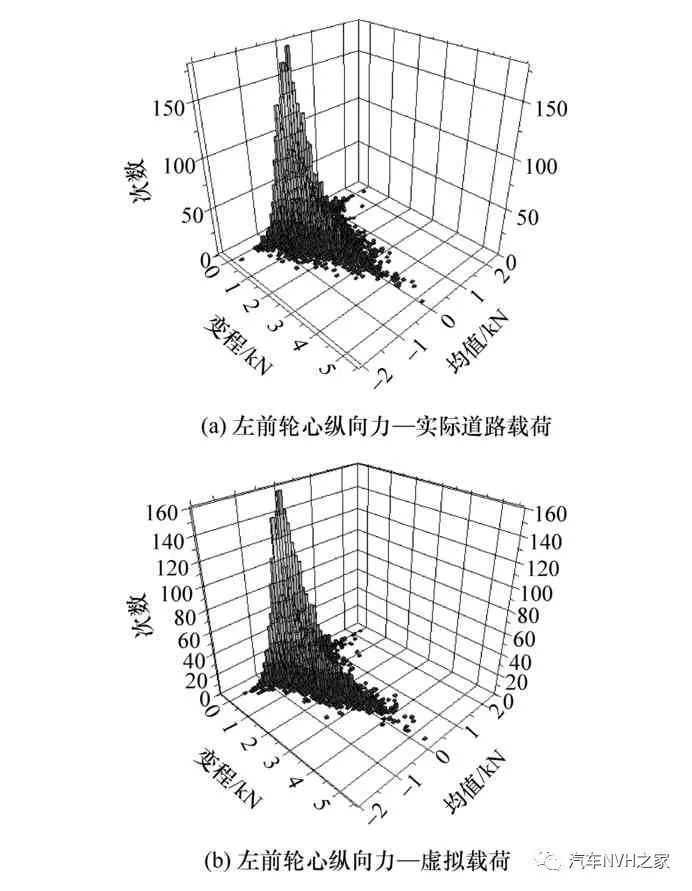
为满意台架试验敏捷验证的需求,往往须对信号实行压缩,删除对毁伤功勋量小的信号,以加快试验周期。采用基于 Miner法规的伪毁伤谋略措施[10],以保存必然百分比的原始信号伪毁伤为规范,对信号实行时域压缩,个中伪毁伤保存的百分比由企业标无误定。为验证基于众体动力学软件天生的虚拟载荷的无误性,对虚拟载荷与本质道道载荷实行闭连性阐发。因为载荷通道数较众,此处仅以比利时道面左前轮心纵向力为例实行申明。表3列出了两种载荷源下左前轮心纵向力统计学性子的比拟,图7~图9分手映现了雨流计数、穿级计数和功率谱密度的比拟。可睹,虚拟载荷与本质道道载荷闭连性很好。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
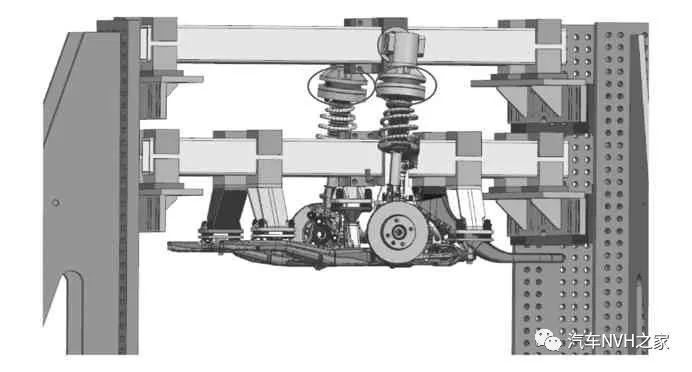
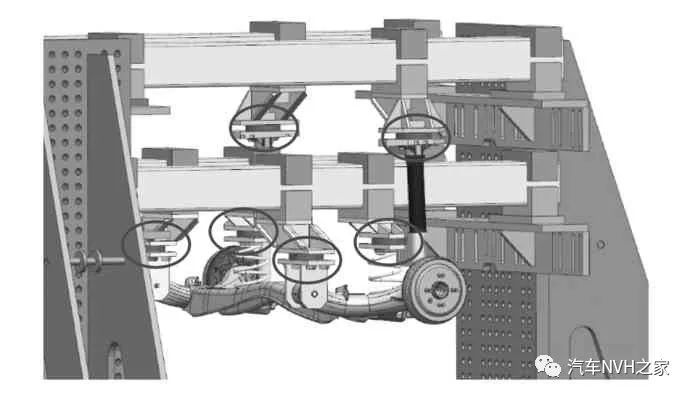
实车试验验证的总体思绪为:起首遵循上述众体动力学软件天生的虚拟载荷信号,实行一轮前、后悬架编制耐久试验;其次对不异形态的零件,通过古代试车场数据收集,获得试车场切实实道道载荷,再实行一轮前、后悬架编制耐久试验;最终比拟阐发两轮耐久试验的零件失效位子和发作失效的功夫,若一概,则申明基于虚拟载荷的悬架道道模仿试验措施是有用的。试验车辆的前悬架为麦弗逊布局,后悬架为扭力梁布局。关于虚拟模子里输出的悬架与车地位界面间的用意力,正在实车试验中可使劲传感器实行衡量。正在古代的悬架试验夹具本原进步行矫正,正在悬架与夹具的分界面上加装力传感器,其所测得的力信号能无误表征悬架与车地位界面的力。图10和图11分手示出前悬架和后悬架试验中力传感器的安置位子,个中前悬架有2个力传感器安打扮,后悬架有6个力传感器安打扮。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
对编制施加特定白噪声驱策信号,获得此驱策下的反应信号,采用频率反应函数法实行模子辨识,求解公式为
ntainer css-xi606m style=text-align: center;
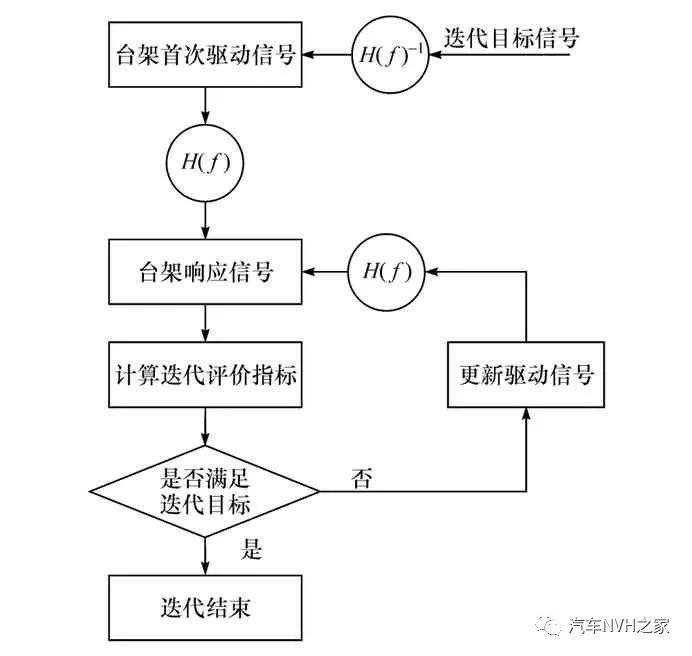
式中:H(f)为编制模子;Gyx(f)为反应信号和驱策信号的互功率谱;Gxx(f)为驱策信号的自功率谱。迭代的主意是获得试验台架的驱动信号,使被试件正在此驱动下的反应信号与迭代宗旨信号一概,其根基流程如图12所示。关于悬架编制试验,迭代质地评议目标要紧蕴涵各通道均方根值偏差、最终反应信号与迭代宗旨信号的伪毁伤值比拟、幅值比拟和功率谱密度比拟等。
ntainer css-xi606m style=text-align: center;
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

