传感器标定是无人驾驶汽车的底子构件之一。粗略地说,传感器校准通告无人驾驶汽车,它的传感器怎样定位正在车辆的高度精度。这使得无人驾驶汽车也许通过正在统一个坐
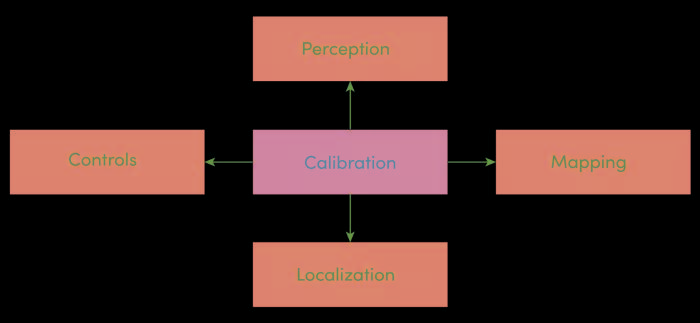
传感器标定是无人驾驶汽车的底子构件之一。粗略地说,传感器校准通告无人驾驶汽车,它的传感器怎样定位正在车辆的高度精度。这使得无人驾驶汽车也许通过正在统一个坐标系的众个传感器(如激光雷达、雷达、摄像机和惯性丈量单位(IMU))数据,领会车辆本身定位。准确的校准新闻关于修图、定位、感知和统制至闭厉重。正在操纵传感器协调深度进修算法之前,传感器标定是必不成少的预惩罚程序,并使机械进修模子也许从分别传感器的角度明白车辆所处的境况区域。
典范的无人驾驶汽车传感器套件由摄像机、激光雷达、雷达和IMU构成。校准的主意是寻找这些传感器和车辆之间的新闻转换。其余,校准亦可克复传感器的内部性格,比方摄像头畸变、或IMU的加快率计和陀螺仪的偏置。这些都是无人驾驶汽车感知、修图、定位和统制模块的根本新闻输入。
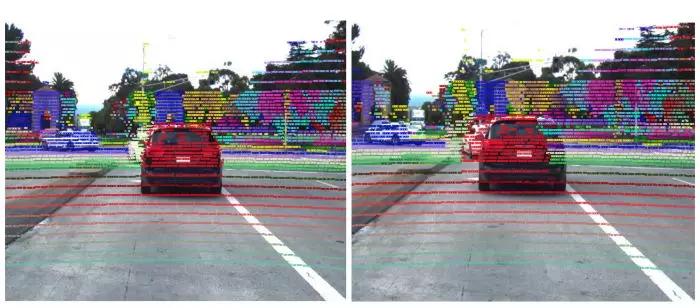
无人驾驶汽车感知编制通过来整合来自众个传感器的数据识其余道途上的智能体(如汽车、行人和骑自行车的人)获取助助无人驾驶汽车所需的高精度数据输出。比方,感知编制将摄像头对行人的检测与激光雷达对统一智能体的检测维系起来。更进一步说,关于间隔无人驾驶汽车 100米的智能体,须要挽回的校准精度~0.2度才调牢靠地协调来自众个传感器的丈量值。这即是为什么校准对确切感知和无人驾驶汽车至闭厉重。
L4自愿驾驶须要的高清舆图,一般是由激光雷达、摄像头和IMU数据协调而成。这些高清舆图包括如车道鸿沟、交通灯、泊车标识等精准新闻。构修高清舆图一般须要从摄像头获取的图像中揣摸语义,并将它们与激光雷达数据实行相闭,以便确切地确定道途的精准新闻。比方,当无人驾驶汽车导航通过一个交通十字途口时,它操纵校准新闻来成婚高保真舆图上的交通讯号灯,云云无人驾驶汽车导航就可能决计是否要停正在某个交通讯号灯前。哪怕是校准仅差几度,无人驾驶汽车也也许会将其车道上的红灯与下一车道上的绿灯殽杂。是以,准确的传感器标定是高保真修图的条件。

定位的主意是及时确切地猜想车辆正在高清舆图上的位子。一个高质地的定位编制一般维系来自IMU、激光雷达、车轮里程表和摄像机的数据。简而言之,定位模块将无人驾驶汽车正在分别传感器之间的运动相闭起来,从而获取无人驾驶汽车正在舆图上实践位子的牢靠猜想。防备,定位精度高度依赖于IMU与激光雷达标定的精度,即IMU到激光雷达的挽回清静移分量。这种校准的不确切会导致无人驾驶汽车不晓畅它自身正在途上的切当位子,而无法确切地晓畅它正在道途上的位子也许会导致坚守不无误的交通正派。
正在编制开荒的早期阶段,必需做出的一个挑选是专一工场校准依旧正在线校准。工场校准使用了一个组织优越的境况和浩繁象征,可能很容易地被传感器检测到,这可能达成高精度的主意。然则,另一方面,正在线校准更具可扩展性。毛病即是也许不那么牢靠。固然两种校准式样都很厉重,但正在项主意早先阶段,切磋职员依旧有限挑选了相对牢靠的工场校准,这也是开荒正在线校准算法的需要进程和厉重底子。

支持无人驾驶汽车的校准须要操纵豪爽的用具。跟着车队界限的扩充,切磋职员操纵了两种手法包管也许疾速证明校准结果:最初,将无人驾驶汽车的校准盘据成校准独立双传感器,然后统一,统一后的最终处理计划才实用于总共无人驾驶汽车。其次,切磋职员操纵了极少用具,可能轻易地从校准进程的任何阶段提取调试新闻,从而探究工场校准进程中浮现的题目的根基起因。

关于L5自愿驾驶,须要疾速确定题目的根基起因。比方,要是无人驾驶汽车漂移到车道的一侧,须要立时搞通晓这种漂移是由哪些起因(定位、修图或校准差池)形成的?针对这一题目,有以下三种处理计划:

目前,Lyft的无人驾驶汽车操纵众个摄像头、激光雷达、雷达和IMU。如前所述,Lyft目标于将总共车辆校准题目剖析为成对的传感器校准题目。是以,Lyft最初校准每个传感器的内部参数,然后独立校准其外部顶部的激光雷达。这使得也许识别和远隔任何校准差池。

然而,该手法也存正在缺陷。因为Lyft的无人驾驶汽车是正在现场事业的,因为温度和振动等身分,校准精度会随时候发作改造。Lyft的下一步是开荒正在线、自我校正校准算法,但因为缺乏底子原形,该项事业正正在切磋中。目前,Lyft采用高精度的工场标定行动地面真值来处理这一题目。其余,还为车载软件栈房装备了一个可能自愿检测不正在原始形态下的校准状况的编制。操纵该编制,任何校准中的差池都可能被识别出来,要是差池胜过了平和鸿沟,车辆将返厂实行工场校准。
汽车测试网-建设于2008年,报道汽车测试时间与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
