摘 要:驱动电机的独揽工夫是电动汽车的闭头工夫之一,对整车机能有确定性的影响。 文中针对电动汽车的恳求对直流驱动电机的独揽编制实行研讨,实行了独揽编制软
采用智能功率模块 IPM 行动强电回道的重要功率器件,策画中采用软件滤波和光电阻隔的手腕以普及编制的抗作对才华,采用隐约 PI调整对电枢电流和励磁电流实行闭环独揽。
试验解释,所策画的独揽编制可以餍足电动汽车的行驶恳求,为进一步实行电动汽车的研讨奠定了底子,积攒了必然的工夫履历。
它的做事是正在驾驶员的独揽下,将蓄电池的电能转化为车轮上的动能,或者将车辆上的动能反应到蓄电池中[1]。
电动汽车对电机驱动独揽编制的根本恳求是:有 4~5 倍的过载动力以餍足短时加快行驶和最大爬坡度的恳求;电机应遵循车型、车辆的行驶秩序实行策画;恳求有较高的功率密度和蔼的功效图(正在较宽的转速和转矩边界内都有较高的功效),从而可以低落车重,延伸续驶里程;为使众电机调和运转,恳求电动汽车驱动电机可控性高、稳态精度高、动态机能好[2]。
目前,正在电动汽车上应用的电机驱动编制重要有直流电机驱动编制、异步电机驱动编制、开闭磁阻电机驱动编制、永磁电机驱动编制。
异步电机有机闭简略、电机本钱低等甜头,但有驱动编制的独揽庞大,不易抵达宽边界的恒功率调速的误差;开闭磁阻电机有用率高、本钱低等甜头,然则电机驱动编制有转矩脉动,噪声大而且应用职位传感器扩展告终构庞大度,低落了牢靠性等误差;永磁电机具有功率密度高、正在宽速率边界内运转功效上等甜头,但有驱动编制电流损耗大,永磁体有退磁题目,有转矩脉动,使命噪声大等误差。
与这 3 种电机驱动编制比拟,直流驱动编制具有本钱低、调速机能好(滑腻和无误)、独揽器简略、独揽相对成熟等甜头,同时直流电机还具有起动转矩高和宽恒功率调速边界,适合正在牵引颈域利用等甜头;因而,本课题研讨的电动汽车采用直流电机驱动编制,即使它存正在板滞换向器所惹起的功效低、转矩脉动大等误差[3],然则因为策画中采用了直流斩波工夫,使得直流电机的功率因数、使命功效、动态机能和转矩脉动性取得清楚改革,因而策画中的直流电机可以餍足电动汽车的使命恳求。
文中所研讨的电动汽车,电池为秤谌铅布电池,单体电池容量85Ah,额定电压 216V(单体电池电压 12V× 电池数 18);驱动电机采用 45kW他励直流电机,其独揽编制硬件策画包含电机的驱动子编制策画和独揽子编制策画[4]。
电机的驱动子编制重要是承受独揽子编制传过来的指令信号,根据指令的恳求无误地驱动电机使命[5]。
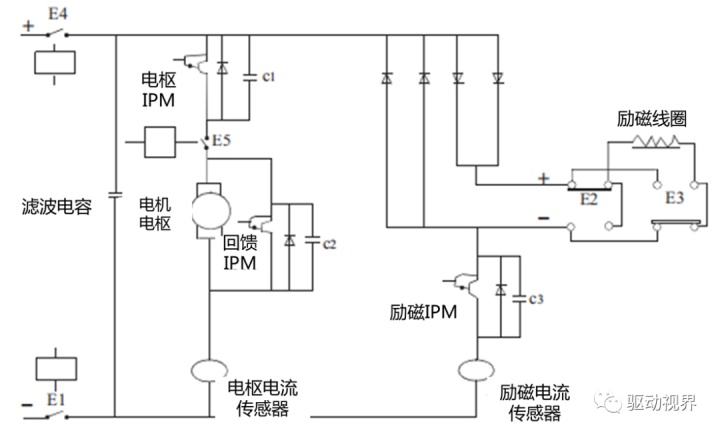
驱动子编制的通断由 5 个继电器(E1~ E5)实行,此中,E1 和E4 继电器位于主回道,分手接到电源的正负极,二者由统一起信号独揽;E2、E3 用于励磁电流的换向,分手由两道信号独揽(正在励磁电流需求换向时,为了防备 E2、E3 同时导通,这两道独揽信号采用互斥的闭联给出);E5 是用于独揽电枢电流的通断,由一起信号只身独揽。
汽车设 D、 R、P 3 种挡位,分手通过电机正转、反转、停机等变换来告终,而电机正转、反转、停机是通过独揽励磁电流的倾向和闭断励磁电流来告终的。
当汽车挂上挺进挡,独揽子编制就会独揽继电器的举措,使 E2 闭合,同时 E3 断开,此时励磁回道的电流流向为:电源正极→ 二极管→ E2→ 励磁线圈→ IPM→ 电源负极;当汽车挂上倒挡,使 E3闭合,同时 E2 断开,此时励磁回道的电流流向为:电源正极→ 二极管→ E3→ 励磁线圈→ IPM→ 电源负极;云云通过独揽励磁电流的倾向从而独揽了汽车的挺进和畏缩,不管汽车是挺进仍旧畏缩,电枢电流的倾向是稳固的,即:
电机速率独揽(即调整汽车速率)采用恒转矩独揽法,纵使电机的励磁磁通为常数,改动电枢的电压实行调速,调速公式如下:

式中,n 为直流电动机转速,U 为电枢两头电压,I 为电枢电流,R为电枢回道总电阻,Φ 为每极磁通量,CE 为电机的电势常数。
ntainer css-xi606m style=text-align: center;

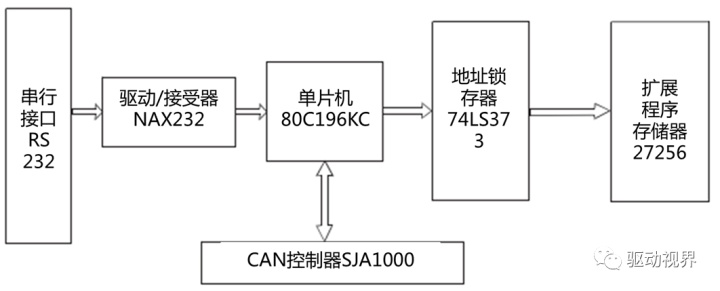
式中,UO 为电枢绕组两头的均匀电压,α 为PWM 占空比,0≤ α ≤ 1,UI 为电枢电源电压。独揽子编制的性能是承受驾驶员的操作指令、驱动子编制的状况信号等并对这些信号实行经管运算,将电机下一步该当采用的举措以指令的格式传到驱动子编制[6]。此中,MCU 模块的道理框图如图 2 所示,主经管器采用 INTEL 公司的 MCS96 系列单片机中的 80C196KC。CAN 独揽器用于实行与由整车独揽器、电池束缚编制和车载消息编制等构成的 CAN 搜集间的消息交流。
ntainer css-xi606m style=text-align: center;
独揽子编制有 6 道开闭量输入:钥匙、驻车挡、挺进挡、倒挡、电枢过流珍惜以及电动机转速信号;有 7 道模仿量输入:主回道电流、主回道电压、电枢电流、励磁电流、油门、功率元件温度以及电机温度;有 8 道开闭量输出,分手是:主回道继电器(E1、E4)、电枢继电器(E5)、励磁继电器1(E2)、励磁继电器2(E3)以及报警、状况输出等;有 2 道模仿量输出:PWM0(电枢回道功率器件独揽信号)和 PWM1(励磁回道功率器件独揽信号)。为普及编制的抗作对才华,采用了光电阻隔等抗作对手腕,正在数字量传输的进程中,为避免或许产生的悬浮状况,正在差别的场地分手应用了上拉和下拉电阻。用于电压、电流衡量的霍尔传感器,它将外部信号转换为电流信号,需求通过一个一阶 RC 并联电道将其转化为电压输出,然后再将电压加到同相输入的运算放大器的输入端,以普及 A/D 转换的精度[7]。采用过 2 道高速输出口 HSO0、HSO1 的按时终了来告终 PWM 占空比输出,其频率为 2K,输出 的 PWM 波可直接加到独揽智能功率模块IPM 上。为普及软件的可读性和可移植性,采用 C言语策画,独揽编制软件告终编制初始化、经管终了函数以及输出独揽信号等性能。
ntainer css-xi606m style=text-align: center;
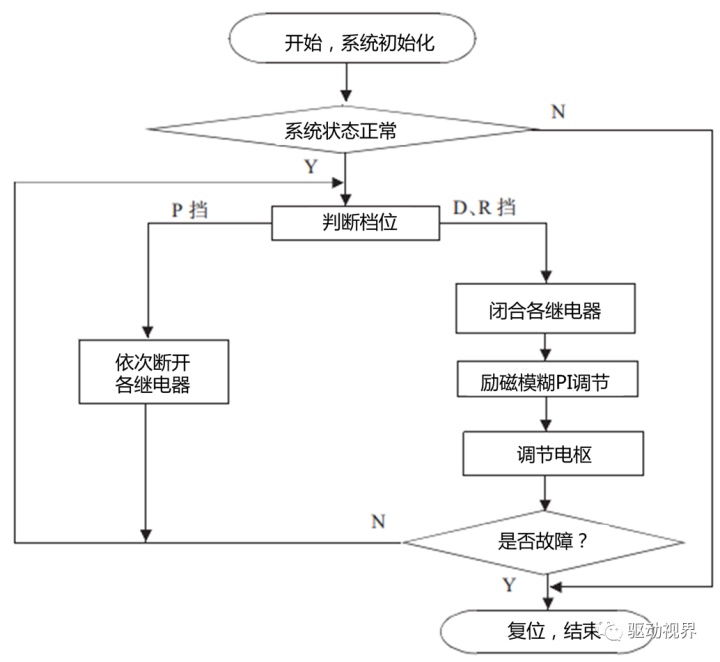
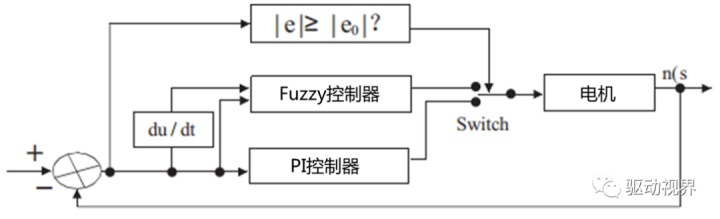
初始化重要包含两道 PWM 初始占空比、继电器初始状况的树立等,翻开 HSO 和软件按时器等所用到的终了。(1)串口接管数据终了;(2) 挡位转折终了经管:采用非可樊篱终了 NMI 经管,对挡位信号做出实时反映,防备因挡位切换产生紧急举措;(3)CAN 总线终了:应用终了 INT1,当有 CAN 总线数据时,将数据及包头消息读入相应缓冲区,将CAN 总线数据符号职位位,等候主轨范进一步经管;(4)HSO 终了。PWM 波采用按时器 T1 行动基准,周期为2kHz;采用软件按时器终了采样,采样周期250Hz;励磁和电枢片面采用隐约 PI 独揽算法,其使命道理框图如图 4 所示。这种独揽算法既抑制了 PID 独揽算法难以餍足高精度、速反映的独揽误差,又抑制了隐约独揽算法难以排挤稳态差错的误差。该独揽器的最大特质是正在大误差边界内运用隐约推理的方式调度编制的独揽量 U,以普及编制的反映速率,正在小误差边界内转换成 PI独揽,排挤隐约独揽难以抑制的稳态差错,云云既能够得到很好的动态机能又能够做到调速编制的无静差。
ntainer css-xi606m style=text-align: center;
试验时,对电池的电压与电流衡量采用的传感器是霍尔元件电压、电传播感器;数据收集编制采用的是UA302/H 型 A/D 收集卡,可与带 USB 接口的各样台式估量机、条记本机相连;显示及数据记实采用的是 IBM T30 条记本电脑。正在试验时,数据收集卡对蓄电池的电压、电流采样频率是 10k,将采样后的数据生存到条记本中,并正在 EXCEL中将蓄电池的电压、电流对年光的闭联绘成弧线 分手给出了纯电动形式下的台架试验与实车试验时电池电压电流转折弧线% 时台架试验的电流与电压转折弧线 能够看出,当汽车未启动时,电池电压为 219V,电流为0A;当启动后油门开度安定正在 25% ,电流安定正在 10A,由此可睹,汽车使命安定牢靠,从而申明电机驱动编制使命安定牢靠。图 6 为油门开度为 50%时实车试验时的电流与电压转折弧线;由图能够看出,当汽车启动阶段,电流与电压转折较大,最高电流可达160A,最低电压可达 202V,当油门开度安定正在 50% 时,电流安定正在 82A,未产生振动,申明汽车使命安定牢靠,从而申明电机驱动编制使命安定牢靠。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏