“钱学森国际卓着科学家系列讲座”正在中科院自愿化咨询所举办。本期讲座邀请到加拿大滑铁卢大学Amir Khajepour作题为“Next Generation of VehicleControl Systems”的申报。申报着眼于汽车节制体例的生长和目前汽车工业面对的寻事。
“钱学森国际卓着科学家系列讲座”正在中科院自愿化咨询所举办。本期讲座邀请到加拿大滑铁卢大学Amir Khajepour作题为“Next Generation of VehicleCo
ntrol Systems”的申报。申报着眼于汽车节制体例的生长和目前汽车工业面对的寻事。跟着汽车通讯、自决驾驶、传感体例和人工智能的迅疾改观,哀求正在车辆节制体例中接纳更一切的形式来打点另日和目今新的生长。Amir Khajepour教养先容了目前正在机电车辆体例顶用于斥地下一代车辆节制体例的道途图。事例和道途试验结果说明,新的具体性形式能够抬高车辆的安乐性,删除斥地岁月和差错。

Amir Khajepour 是加拿大滑铁卢大学的教养。滑铁卢大学与国内高校区别,其哀求学生正在校进修一年后外出实验一年,这是全北美唯逐一所实行这种学制的大学。固然学校创修岁月相对较晚,于1957年创办,但这种奇异的学制哀求使得学校所教育的学生倍受公司青睐。同时,学校良众结业生现正在都正在硅谷作事或创业,好比自愿驾驶卡车公司。
即日,我念起初先容一下我正在滑铁卢大学所卖力的试验室,接着针对车辆节制体例(Vehicle Control Systems)方面咨询的要紧寻事以及下一代车辆节制体例的咨询由来举办说明,终末整体闪现为应对和处分这些寻事而举办的相干作事。

我所统治的机电车辆体例试验室(Mechatronic Vehicle Systems Laboratory)具有囊括博士、本领员、博士后等正在内的咨询职员约40-50人,他们永别卖力区别的咨询项目。所举办的作事实质不单限于表面咨询,而是涵盖从表面咨询到模子安排再到量化临盆以及测试办法和试验测试等总共咨询流程周围。其余,试验室还具有如上图所示的测试车辆。试验室面向扫数类型的交通运输东西举办咨询,非论是古代车辆照旧全电式车辆,或是用于电力统治与节制咨询的大型运输卡车,以及用于新本领斥地的新型都邑车辆。
因此咱们的咨询作事简陋来说即是,提出并探究少少新的念法或观点,将其转化为实格式样并行使于实质车辆举办一切测试。上图即是目前试验室所具有的少少测试车辆(test vehicles)。
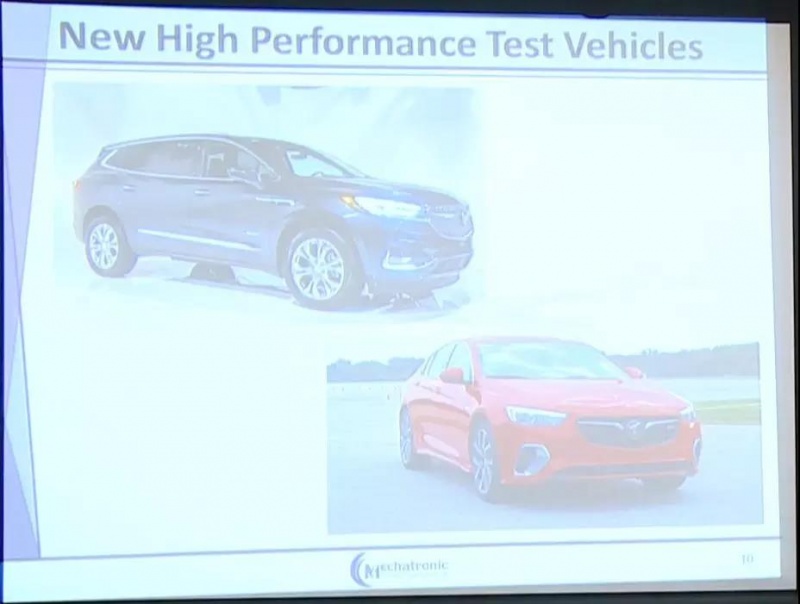
目前,试验室努力于研发不妨全部由车辆举办自决驾驶及节制的高机能车辆(new high performance vehicle),即机能到达饱和程度的车辆。比如,咱们将一辆SUV(Sport Utility Vehicle,运动型众用处汽车)改制为600马力(1公制马力=75千克力·米/秒=735瓦特、1英制马力=550英尺·磅/秒=745.7瓦特)的全电动轿车,其不妨以50英里/小时-60英里/小时的速率举办自决行驶。同时,这辆车可举办与小型轿车一致水平的测试。
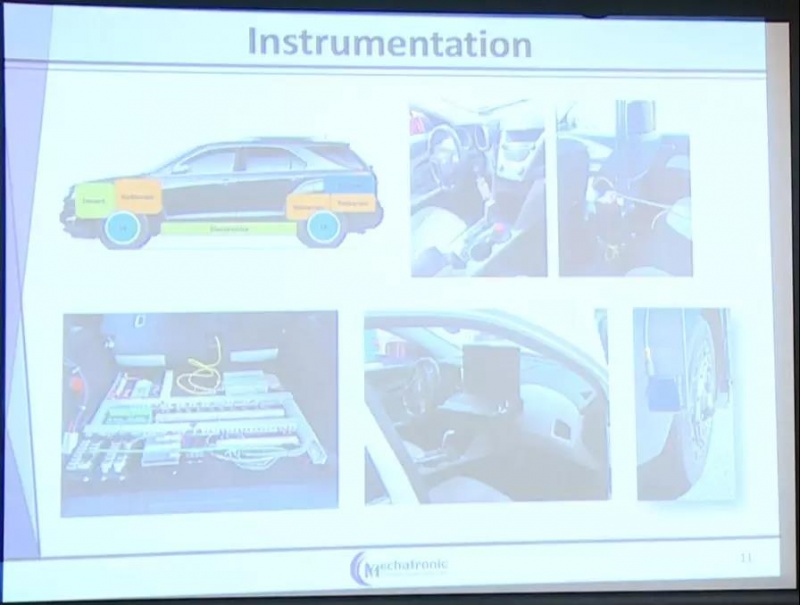
从上图中能够看到,扫数测试车辆的车载安装(instrumentation)都装备完好,使车辆不妨举办各品种型的所需测试。

现正在咱们看到的是测试跑道办法(test track facilities)。左上角的测试跑道正在学校左近,用于车辆大一面的当地测试。右上角是位于美国米尔福德市的跑道办法,其用于通用模子车的相干测试,图中闪现的是途面临比测试途段。下图闪现的是车辆正在英国金罗斯市举办冬季测试。
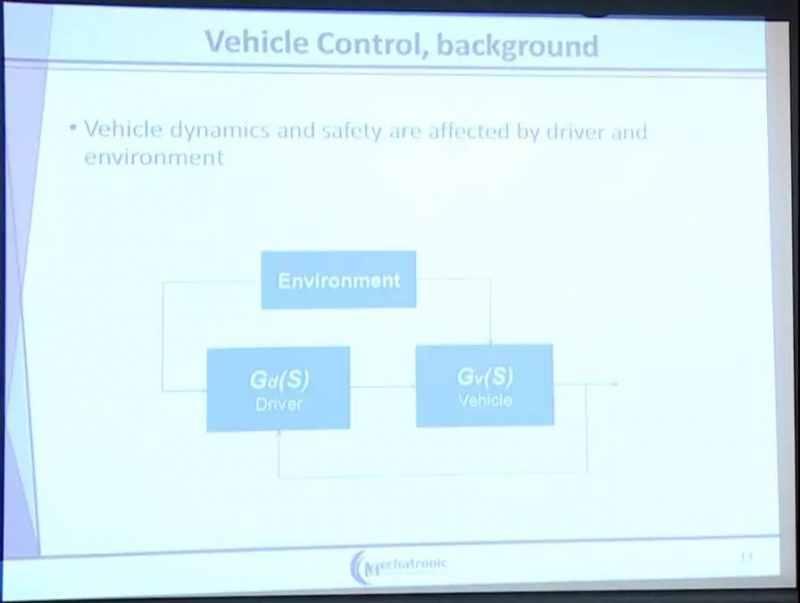
从具体来看,一辆车(vehicle)就相当于一个节制体例,车辆的行驶就像节制器的运转。驾驶员(driver)正在驾驶车辆时会对周遭境遇举办巡视,比如途面情景、视野内的可睹物体等,并给车辆发送相应的信号,即施加给目标盘、刹车和油门的操作信号。随后,驾驶员通过眼睛和耳朵等感知器官领受车辆形成的状况反应信号,举办相应的节制调度。
境遇(environment)不妨对驾驶员和车辆同时形成影响。即使道途情景较差,那么车辆恐怕不会对节制操作做出精准的反响,或者驾驶员的驾驶行径恐怕会发作改观。因此境遇是影响车辆节制体例的噪声和搅扰的一一面。
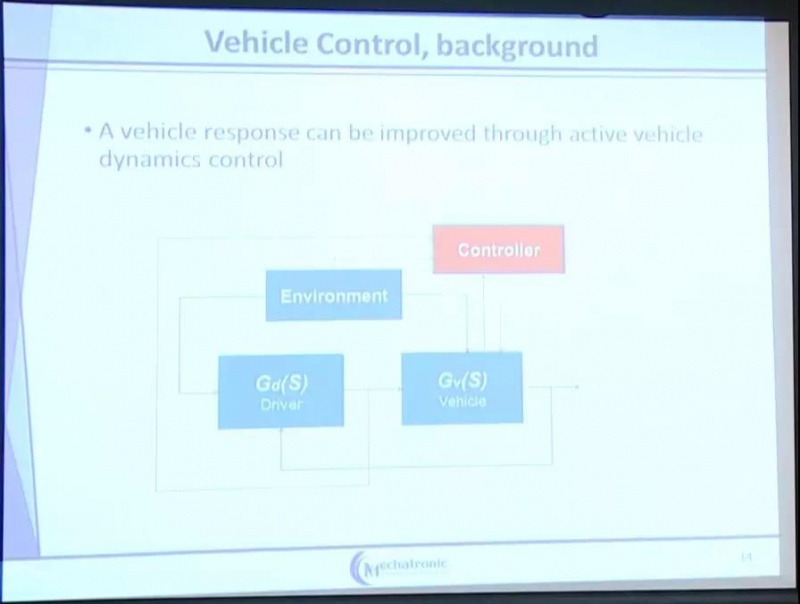
而正在车辆中参预节制器(controller)后,就不妨告终对车辆阻碍或难以节制情景的调度。节制器通过境遇输入获知行驶境遇途况,同时通过驾驶员的输入体会驾驶操作状况。节制器寻常还需遵循车辆自己的行驶情景,比如转向角、制动转矩或牵引转矩等消息,向车辆反应相应的信号,从而调度驾驶员的驾驶行径。
结果上,主动节制体例引入车辆的史册并不长。17世纪之前,扫数车辆的行驶都仅依赖于驾驶员的操作节制,人类是车内独一的节制器。正在那之后,车辆节制体例中起头参预少少被动的安乐安装,好比安乐带(seat belts)。

17世纪今后,市道上显露了囊括主动安整体例正在内的新型修立安装。起初是正在1978年显露的防抱死刹车体例(Anti-lock Braking System, ABS),其影响是当刹车踏板被使劲踩下或车辆正在结冰的地面上制动时,确保车轮不会被全部抱死锁住。随后正在1980年,显露了不妨对车身改观举办更好地节制的主动或半主动悬架体例(Active/semi-active suspension system)。1987年的牵引力节制体例(traction control system, TCS)用于防守车辆正在起动或加快时显露的车轮打滑等形势。其后,1995年面世的车身电子平静圭表(Electronic Stability Program, ESP)能够通过正在车辆一侧接纳制动手段使车身形成转动以节制车辆的搬动。正在那之后,2004年的主动前轮转向(Active Front Steering, AFS)不妨调度转向角度来防守某些事项的发作。

目前市道上任何类型的车辆,都起码具有最低圭臬数目的车辆动力学节制体例(Vehicle Dynamics Control System, VDC)。同时,无论是用于安整体例照旧其他体例中,区别用处的微打点器数目都正在火速增加,这使得车辆形成了“车轮上的企图机”。而不妨正在这些“企图机”前进行驾驶操作,要紧归功于洪量存正在于个中的打点元件和行使圭表。

现正在的题目是,这些参预到车辆中的主动节制体例都是相对独立的组件。车辆所需的区别体例组件恐怕必要永别从区别的公司采办,同时这些组件以及节制器之间还必要举办成亲,以确保它们不妨顺手地协同作事。正在这个流程中,汽车公司为保障区别节制体例不妨顺手调和运转,构修了很众查找表和事项库,导致损耗了洪量的岁月和资金。
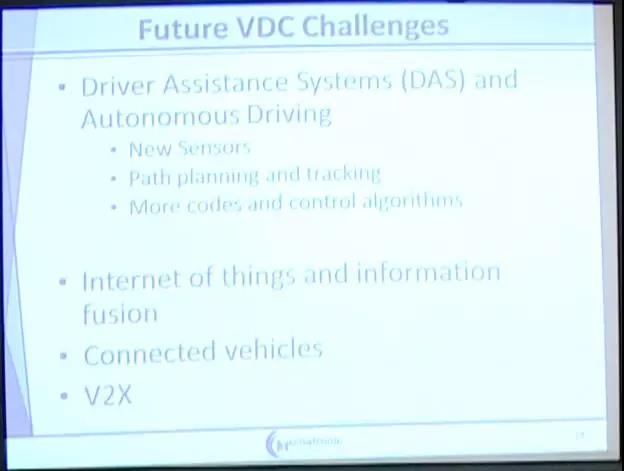
而车辆节制体例的杂乱度正在另日将会进一步扩展,其要紧与驾驶员辅助体例(Driver Assistance System, DAS)和自决驾驶(Autonomous Driving)相闭,比如扩展新型传感器、途途筹办和跟踪性能以及越来越众的圭表代码和节制算法。同时,除了车辆不妨自决获取的消息外,所用消息还来自于物联网(Internet of Things, IoT),其使得扫数事物间都能够举办消息交互。与此同时,所得回的洪量消息必要举办有用操纵,这就引入了消息调和(information fusion)这一杂乱度。其余,连通的车辆(connected vehicle)间能够举办疏通交互,这意味着一辆车不妨得回其左近扫数车辆的消息。车辆与其他车辆、根源办法乃至扫数的事物的消息交互使得体例变得特殊杂乱,因此现正在的题目是,该怎样操纵这些杂乱消息?
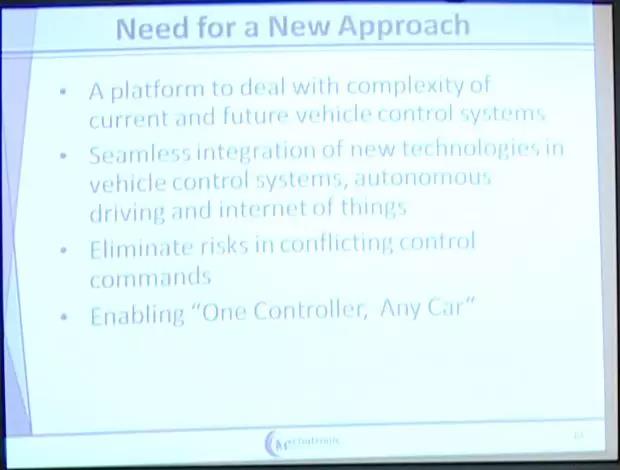
这些寻事哀求咱们采用全新的思绪对车辆节制举办咨询。起初,必要一个不妨处分体例现存和潜正在杂乱度题目的平台。平台不妨将现有体例与无人驾驶、物联网等新本领举办无缝整合,但要避免体例间激励冲突或伤害境况。同时,要确保驱除由区别体例冲突指令所导致的危机。其余,需研发可行使于扫数区别类型车辆的节制器,正在低落体例具体本钱的同时不扩展恐怕发作冲突阻碍的组件。
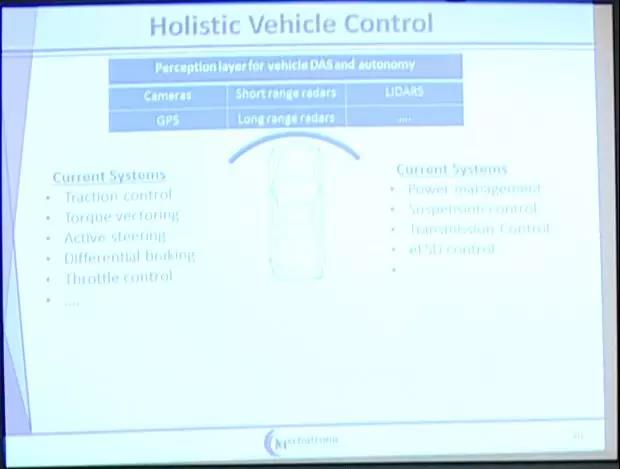
除增添驾驶辅助体例(Driving Assistance Systems, DAS)和自决驾驶的感知层(perception layer)外,为告终驾驶辅助和无人驾驶,还需正在现有根源上安置很众新传感器,囊括摄像机(cameras)、GPS、雷达(radars)、激光雷达(lidars)等。
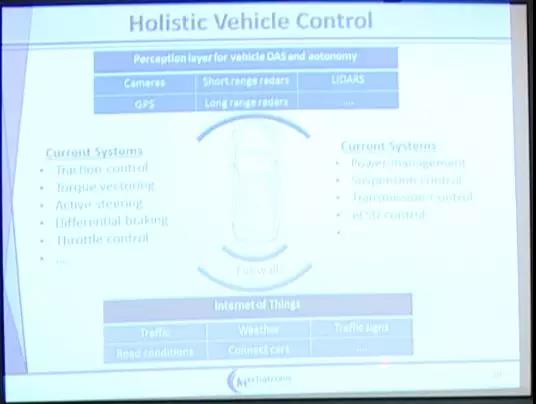
与此同时,咱们操纵物联网本领为车辆供应洪量的新消息。也即是说,车辆与周遭其他修立举办交互以获取交通流量、道途情景、气候境况等消息。正在体会各体例的作事道理之后,咱们就能够对车辆举办优越的节制。
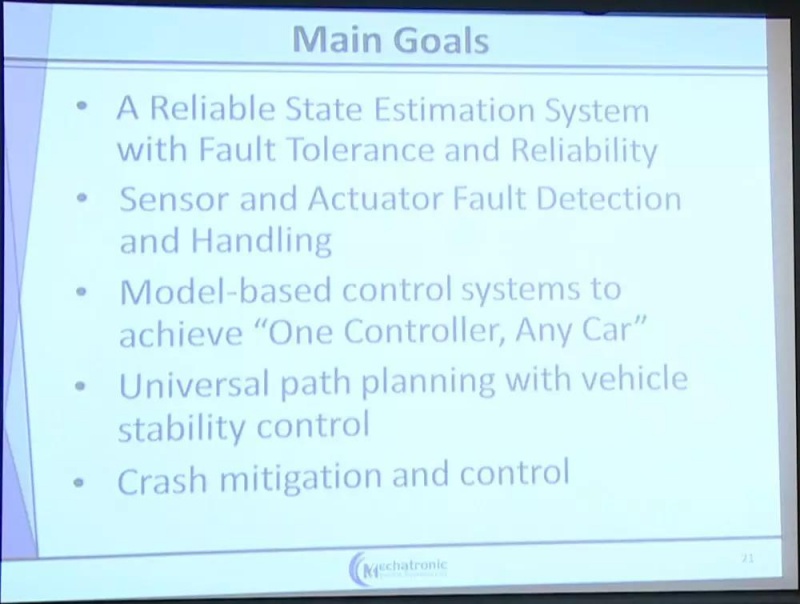
那么,为构制安乐牢靠且可控性强的车辆,必要举办哪些作事呢?较着,起初是车辆状况忖度,由于车中扫数的状况和参数消息不恐怕都通过传感器举办获取。比如,用于节制车轮滑动情景的实质车速,结果上其衡量并禁止易。其次,传感器和推行器的容错检测和打点也特别紧要。人类能够通过众种途径感知车辆的噪音、发抖或其他状况,但无人车该怎样正在传感器发作阻碍时获知车辆的状况消息呢?别的,咱们该当确保扫数的行驶境况都基于模子库,而不是查找表或者事项库。惟有通过这种形式,车辆行驶情景才华被更合理地评释、拓展和优化。同时,车辆也特别必要一个能够应对不怜惜况的通用途途筹办体例。终末,当发作车辆碰撞事项时,自决驾驶体例为减轻事项失掉而接纳的手段也是咨询实质之一。以上这些即是咱们正在咨询车辆节制体例时念要告终的要紧标的。
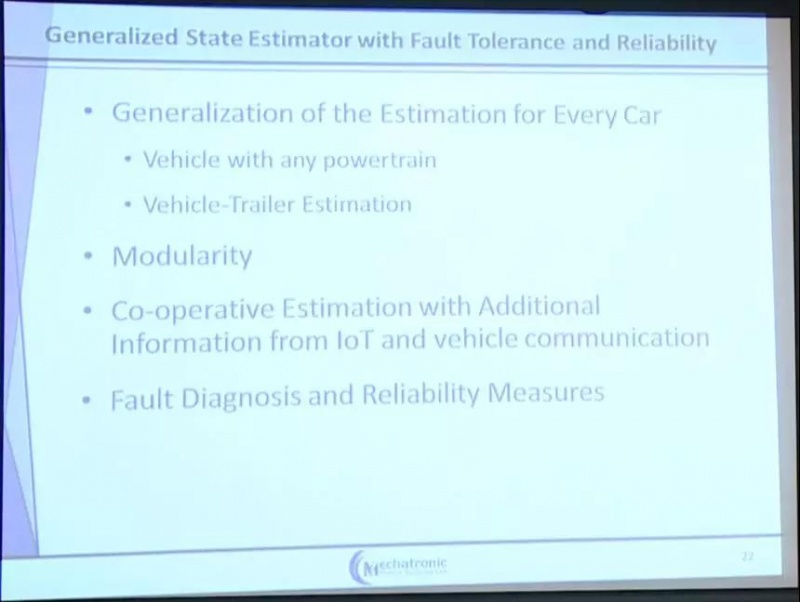
当道到具有容错才华和牢靠性的普通状况忖度(generalstate estimation with fault tolerance and reliability)时,咱们起初要确保扫数具有动力体例(powertrain)和拖车机闭(trailer)车辆的平常运转,因此需对车辆中的扫数状况和参数举办牢靠的忖度。其次,忖度体例的模块化(modularity)使得体例的增添变得更容易。同时,协同忖度(cooperative estimation)也特别紧要。咱们愿望通过车辆间的消息交互以及异常数据的调和进一步抬高忖度体例的机能。而且,忖度体例必要举办阻碍诊断和牢靠性量度(fault diagnosis and reliability measures),这有助于确保体例机能足够优越。

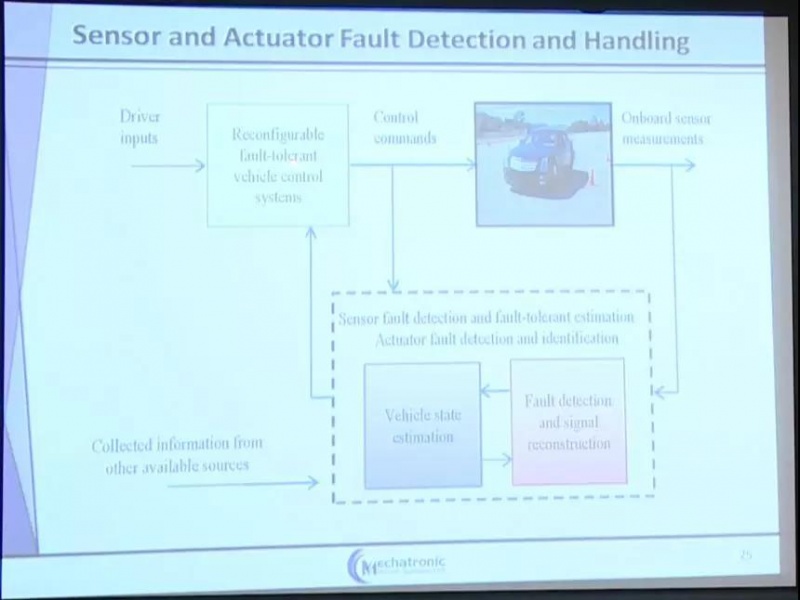
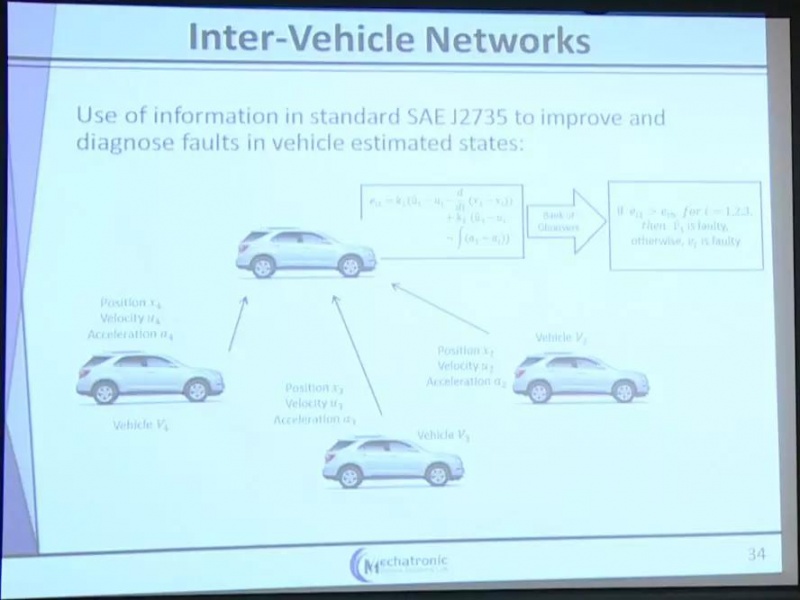
这是一幅忖度体例的机闭总图(general diagram),假设现正在有一辆车(左侧中部)和洪量传入车辆的消息。扫数来自图中左下角阻碍检测和重构一面(Sensor/Actuator Fault Detect & Reconstruction)以用于推行器和传感器运转境况诊断的信号以及来自物联网模块(Internet of Things)的异常消息,都将输入到右侧的普通状况忖度模块(State Estimator)。体例都必要举办哪些消息忖度呢?
起初,从图片的顶部车轮扭矩忖度模块(Wheel Torque Estimator)起头,咱们必要体会施加于每个车轮的扭矩,以确定车轮没有显露打滑或锁住的形势。接下来,力忖度模块(Force Estimator)会对坡度和倾角举办忖度。即使存正在必然的坡度或倾角,则需通过图中底部的道途检测模块(Robust Road Grade/Bank Estimator)检测和忖度行驶途况,而且右侧中部的速率忖度模块(Velocity Estimator)将衡量每个车轮的速率。终末,图片右上角的忖度牢靠性模块(Estimator Reliability)会量度扫数已竣工忖度的牢靠性,并将所得结果消息返回节制体例,使其不妨对节制器举办相应的操控。
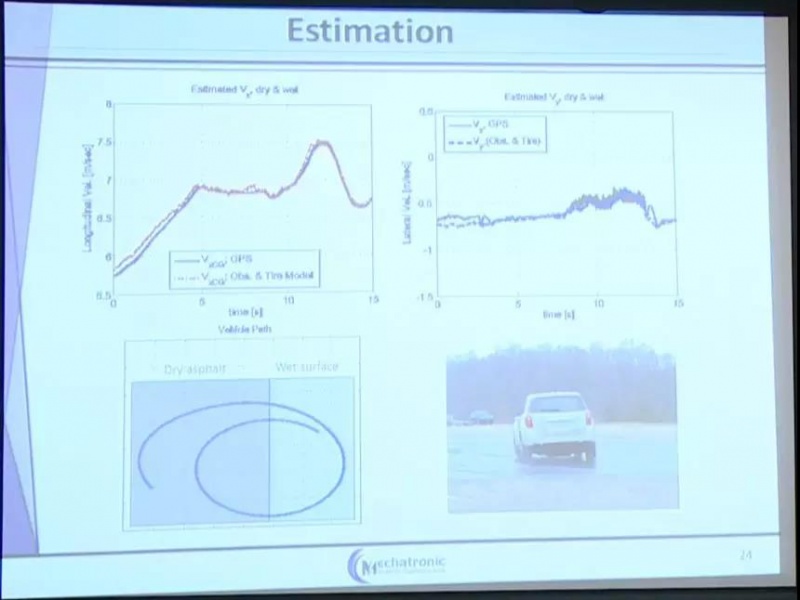
下面是一面测试结果。测试通过至极不睬念的行驶途况来巡视车辆的忖度结果,同时车辆需尽量维持平静车速。正在测试流程中,车辆以环形道途正在干燥的沥青途面(dry asphalt)和湿滑的沥青途面(wet asphalt)上瓜代行驶,与此同时永别对其正在两种道途上行驶的纵向速率(longitudinal velocity, vx)和横向速率(lateral velocity,vy)改观举办忖度。测试结果如上图,图中的两条弧线永别代表GPS数据和忖度数据。能够看到,体例对车辆实质情景的忖度结果精确度特别高。
针对传感器的失灵或阻碍形势,咱们构修了一个可重构车辆容错节制体例(reconfigurable fault-tolerant vehicle control system),并将其增添正在图中左上角的驾驶员输入之后。体例正在领受到传感器失灵或阻碍的信号后,务必确保不妨检测到对应传感器,并通过其他传感器对其举办重构。
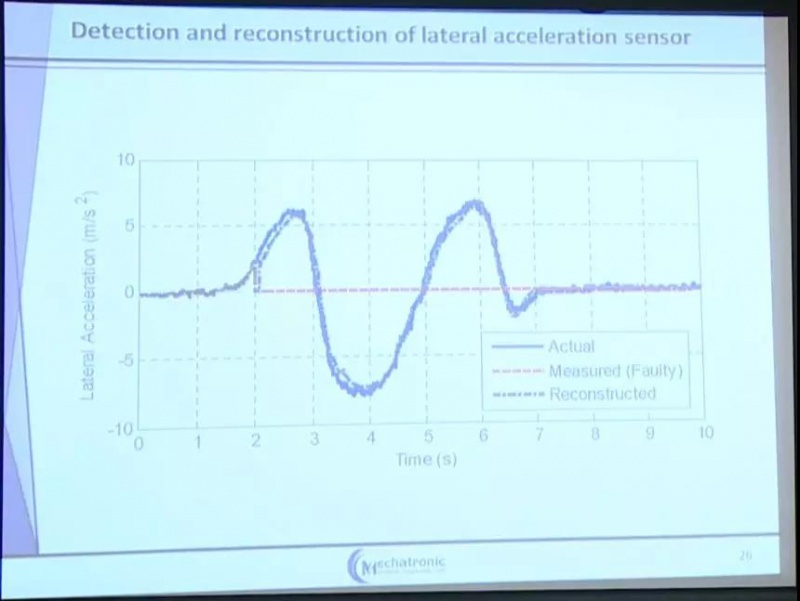
接下来我以横向加快率ay传感器的检测和重构为例举办整体注释。正在图中,蓝黑红三色弧线永别暗示横向加快率的实质数值、重构数值和衡量数值。当传感器正在2秒时发作阻碍导致检测信号损失后,体例操纵其他的传感珍视构所得信号的精确度较高。因此,假使正在落空传感器检测信号的境况下,体例仍然能够得回优越的重构信号。
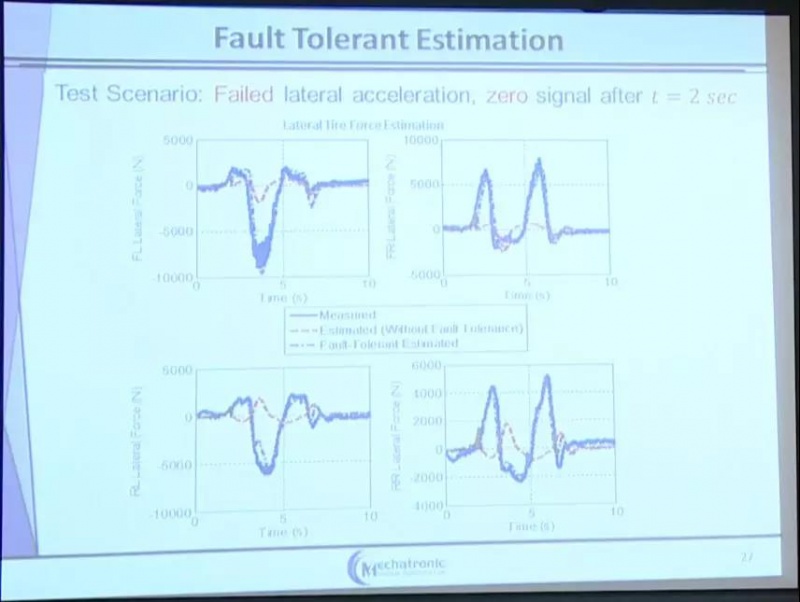
现正在再来看刚刚这个示例的容错忖度咨询(fault tolerant estimation)。上面四幅图永别是左前(Front Left, FL)、右前(Front Right, FR)、左后(Rear Left, RL)和右后(Rear Right,RR)四个车轮侧向力忖度(Lateral Tire Force Estimation)的比较试验结果,图中的蓝黑红三色弧线永别暗示轮胎侧向力的实质信号、重构信号和衡量信号。较着能够看到,非容错体例只可给出具有较大差错的阻碍信号(fault signal),而重构信号则不妨获得各车轮侧向力的精确数值。
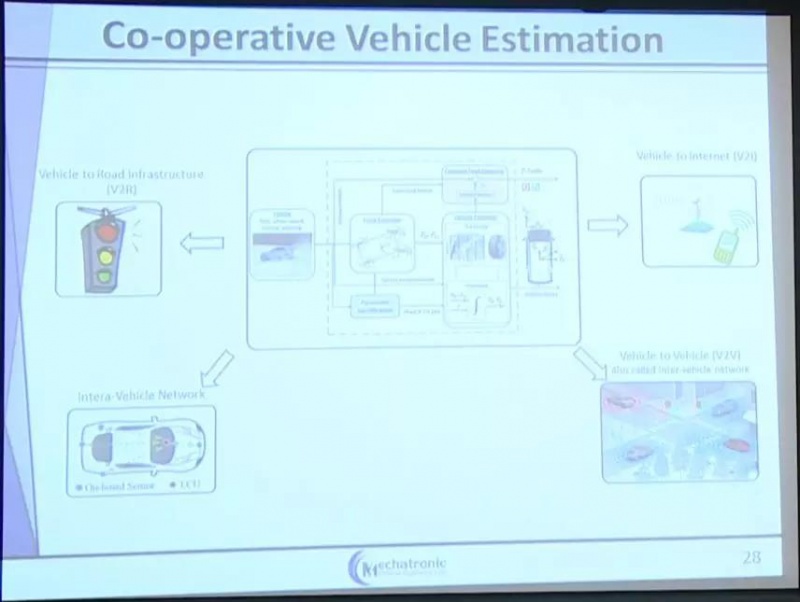
别的,咱们的咨询作事还囊括操纵外界消息对忖度结果举办圆满。这些消息恐怕来自V2R(Vehicle to Road Infrastructure)、物联网或V2V(Vehicle to Vehicle),然而该怎样应用这些消息举办忖度的优化呢?正在具有体例内置忖度的境况下,咱们必要将数据调和以优化忖度。
正在咨询收集通讯的具体观点后,咱们将其表面引入忖度结果的抬高咨询中,并将车辆的通讯收集分为车辆内收集(Intra-Vehicle Network)和车辆间收集(Inter-Vehicle Network)。
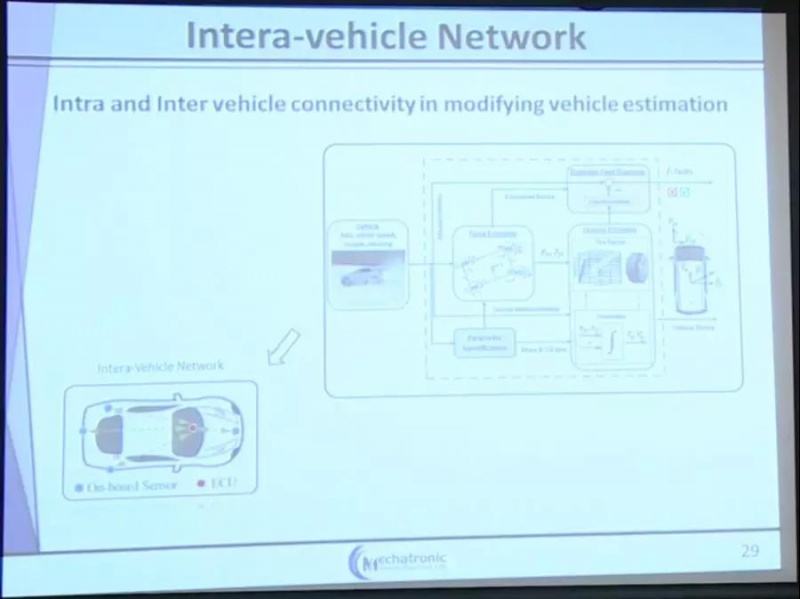
通过车辆内收集,车辆中区别地方的胸襟值可用于统一地方忖度结果的圆满。比如位于图片左下角的这辆车,其四个车轮都与车身相连。因为车辆具体的刚体运动,车轮所正在四个角的速率映照到车辆中央地方都应获得相似的结果,这即是收集通讯的相似表面。
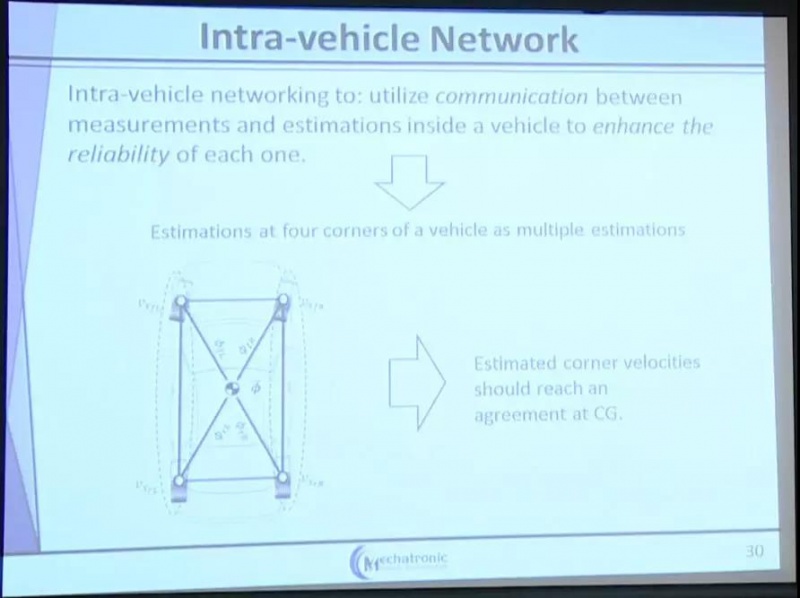
操纵这个表面,车辆每个角车轮的速率数据能够通过车辆内收集传到中央地方,同时遵循言道动力学(opinion dynamics)抬高中央地方忖度结果的牢靠性。因此假使某个车轮供应的是过失数据,中央地方的状况仍可通过其他车轮的数值举办忖度,并返回给车辆的每个角调度车轮状况。
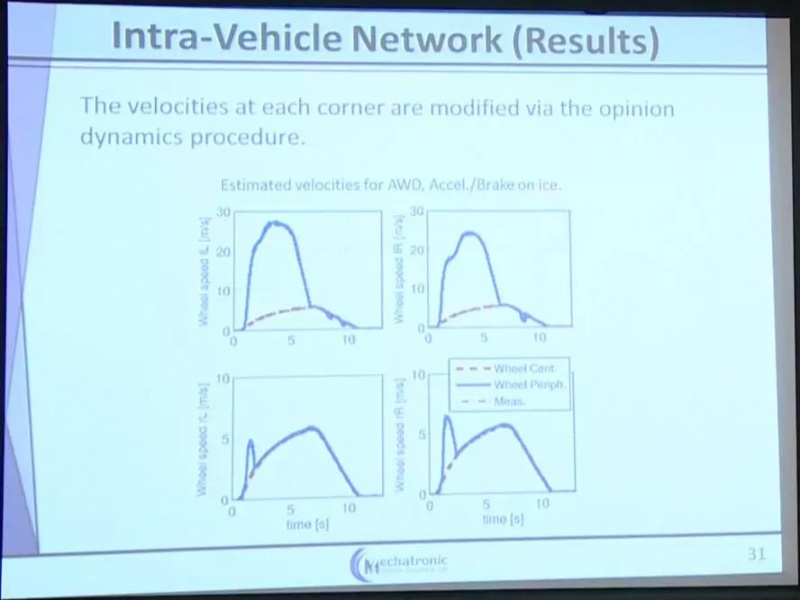
上图是正在冰面上的加快和制动测试所得一面结果,四张图永别代表车辆四个车轮的数据,咨询对象是车轮中央的速率。蓝色和血色的弧线永别描绘传感器实质测得车轮外围(Wheel Peripheral)和车轮中央(Wheel Peripheral)的速率,玄色弧线是通过车辆内收集企图所得数值(Measure)。
这是一项很难举办的测试,稀少是当车轮挽救或锁住时。车轮外围速率正在第一行两幅图中与车轮中央速率的过失注释车轮显露打滑失控形势,不才方两图中则显露速率突增形势,而操纵车辆内收集则不妨告终对车轮中央速率的无过失精确忖度。

车辆间收集(Inter-Vehicle Network)的通讯境况也是相仿的。每一辆车的通讯都遵守现行最新圭臬。
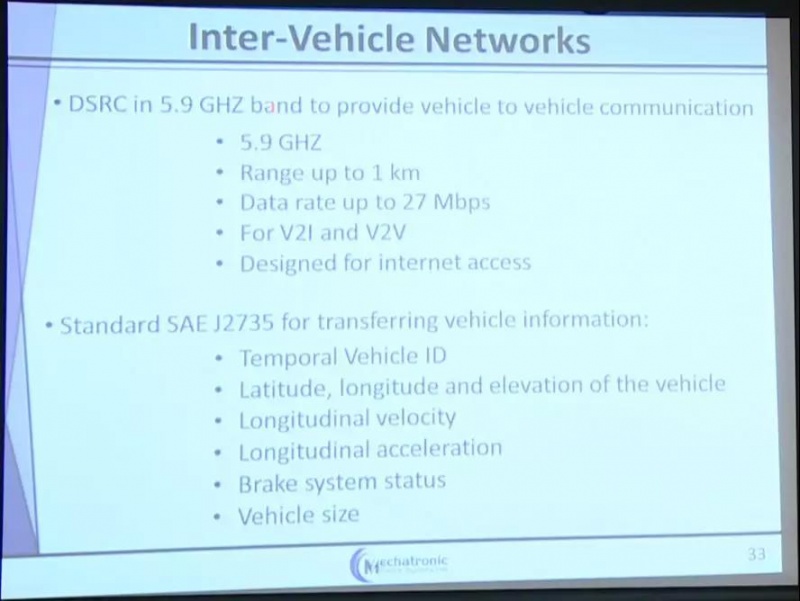
能够遐念车辆现正在处于一个收集中,收集中的每一个节点都正在向其传送消息。遵循从每个节点得回的消息不妨对现有消息举办圆满,随后再将更新后的消息传回其他车辆。乃至,能够操纵这些消息遵循言道动力学向指定车辆发送消息,以圆满车辆的状况忖度。这即是咱们所采用的消息调和形式。
上图即是车辆间收集的全体消息交互流程。图中最上方的车辆领受其他车辆所发送的速率及其他消息,举办自己状况忖度的圆满,同时,其也向其他车辆发送消息,使车辆体会各自的状况忖度境况。以上即是状况忖度方面的咨询作事。
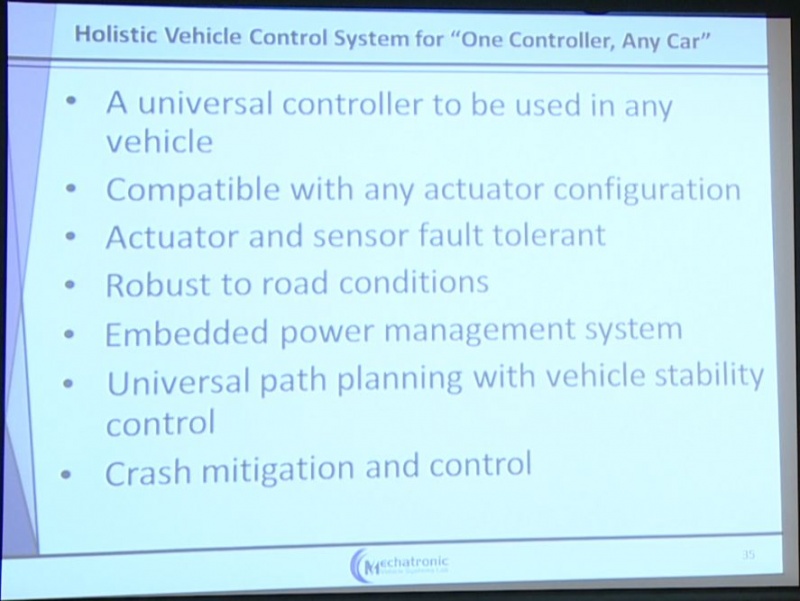
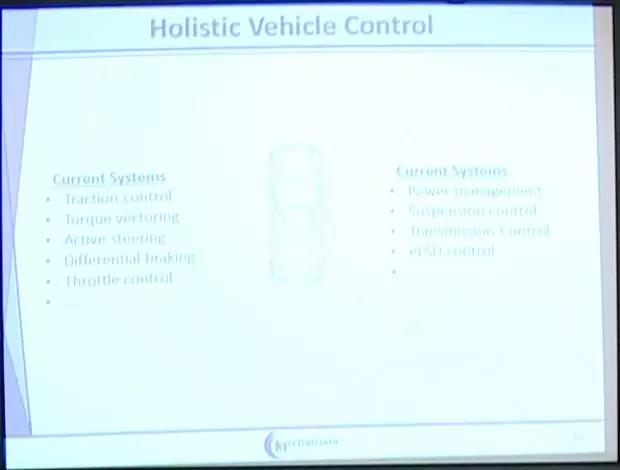
其余,咱们愿望斥地一种可行使于扫数车辆的通器具体车辆节制体例(Holistic Vehicle Control System)。其不妨兼容任何类型的推行器,告终推行器和传感器的容错,并正在任何途况下都永远维持鲁棒性。同时遵循另日生长趋向,其还应具有嵌入式电源统治体例(embedded power management system),并不妨告终通用途途筹办(universal path planning)和无人驾驶规模咨询中日益紧要的碰撞缓解(crash mitigation)。
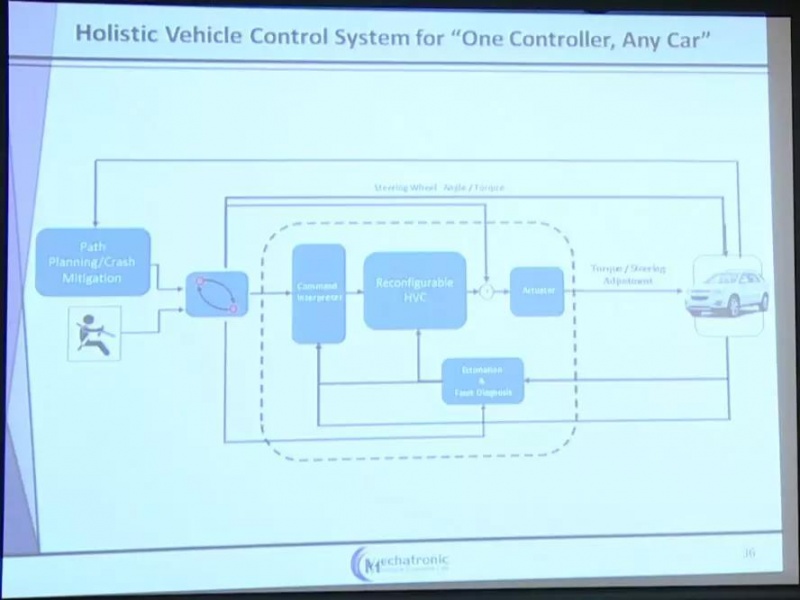
从上图最左边来看,关于普通的车辆节制流程,无论车辆由体例自决节制照旧由驾驶员节制来举办途途筹办或驾驶操作,或是两者通过转换机制瓜代举办节制,节制都需历程号令评释器(Command Interpreter)。体例不妨通过号令评释器懂得驾驶操作的宗旨,比如踩下油门或踩下刹车的操作标的。同时,车辆必要一个可重构体例(Reconfigurable HVC)。其不妨正在某个推行器发作阻碍时,通过对所需作事工作举办再分派以确保对车辆的平常节制。随后,体例将通过忖度和阻碍诊断(Estimation & Fault Diagnosis)以及推行器(Actuator)。终末,节制号令达到车辆各元器件,告终车辆节制操作的整体履行。

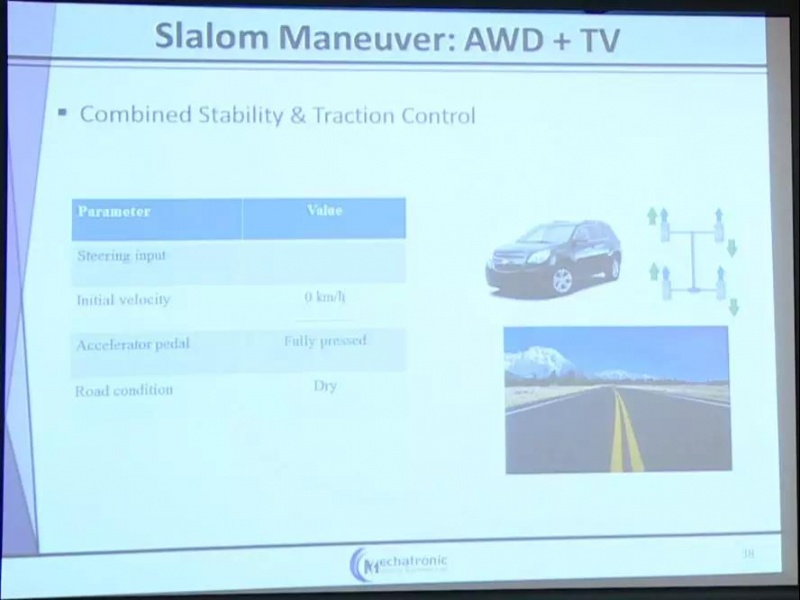
节制的可重构性(control reconfigurability)是针对现有的乃至另日的任何车辆而言的。起初遵循动力传动体例(Driveline),车辆可分为全轮驱动(All Wheel Drive , AWD)、前轮驱动(Front-Wheel Drive, FWD)和后轮驱动(Rear Wheel Drive, RWD)。遵循驱动体例,可分为扭矩矢量节制(Torque Vectoring)、差动制动(Differential Braking)和两者的联结体(Hybrid),也可分为主动前轮转向(Active Front Steering, AFS)、主动后轮转向(Active Rear Steering, ARS)和主动全轮转向(All Active Steering, AAS)。除驱动体例外,还能够增添悬架体例等其他体例,节制器则必要不妨节制扫数这些体例。下面将闪现咱们已研发的这类节制器的测试结果,正在测试中一个节制器将被行使于区别的驱动体例或车辆中。
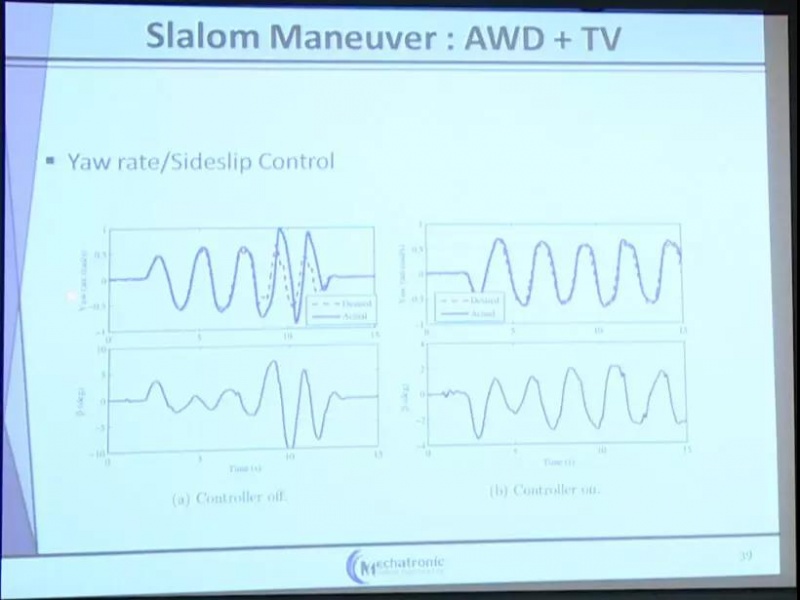
能够看到,第一行和第二行的图永别是角速率(yaw rate)和侧滑角(sideslip angle)的测试结果。左边的两幅图是车辆正在没有安置节制器(Controller off)时举办测试的结果,图中的企望值(Desired)和实质值(Actual)永别为测试标的数值和实质检测数值,测试中车辆角速率的改观应随速率的改观而越来越大。但由于此时车辆中并没有任何节制器,因此图中角速率的实质值并不行全部依据企望值举办改观,两者结果间存正在较大差错。同时,能够看到侧滑角β的结果改观也很大。当侧滑角赶过4°时,车辆的滑动角度将会特别大,因此这意味着车辆的行驶状况并不屈静。
而正在车辆中安置节制器(Controller on)后,巡视左侧两图能够挖掘,车辆角速率的实质衡量值能精确地依据标的企望值改观。这是一个切实的测试案例而不是仿真模仿试验。而再巡视侧滑角结果,其改观边界正在大无数境况下都能平静正在4°以下,这注释车辆处于全部稳固的行驶状况中。
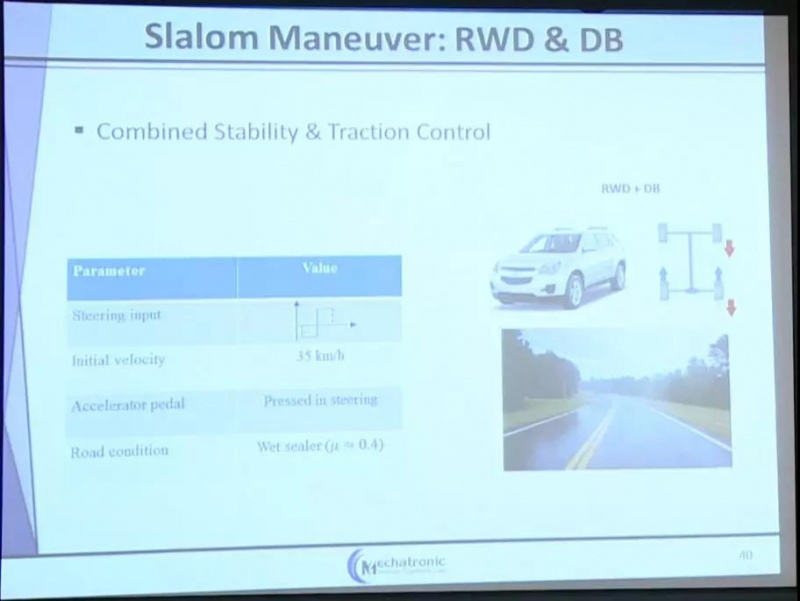
随后,咱们将相似的节制器行使于具有全部区别的设备和节制体例的车辆中,这辆车应用后轮驱动(Rear Wheel Drive, RWD)和差动制动(Differential Braking, DB)。
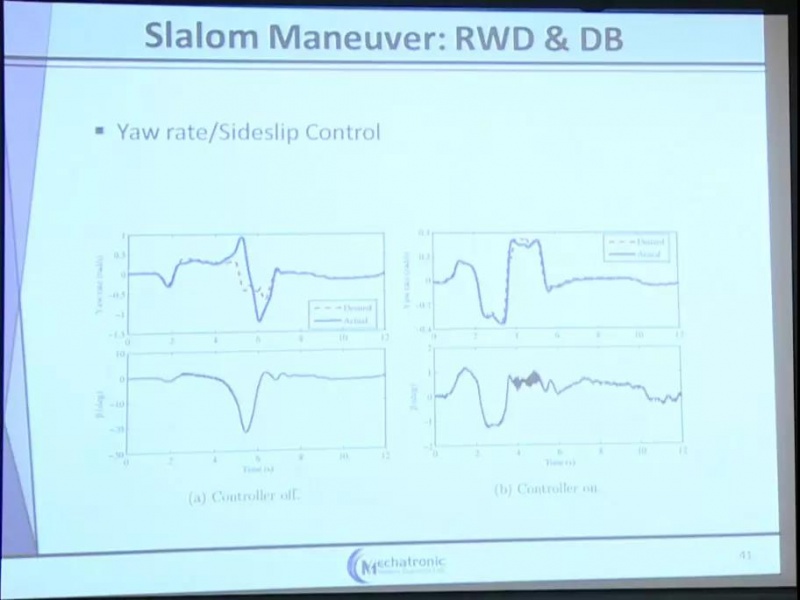
举办相似的测试,左侧两图是没有安置节制器时的测试结果。能够看到,角速率的实质值改观无法全部切合企望值改观,同时侧滑角β的最小值低于-20°注释车辆的侧滑过失特别大。而安置节制器今后,角速率的实质值能与企望值相切合,且β值的改观边界全部正在1.5°以下,也即是说车辆处于优越的节制下。
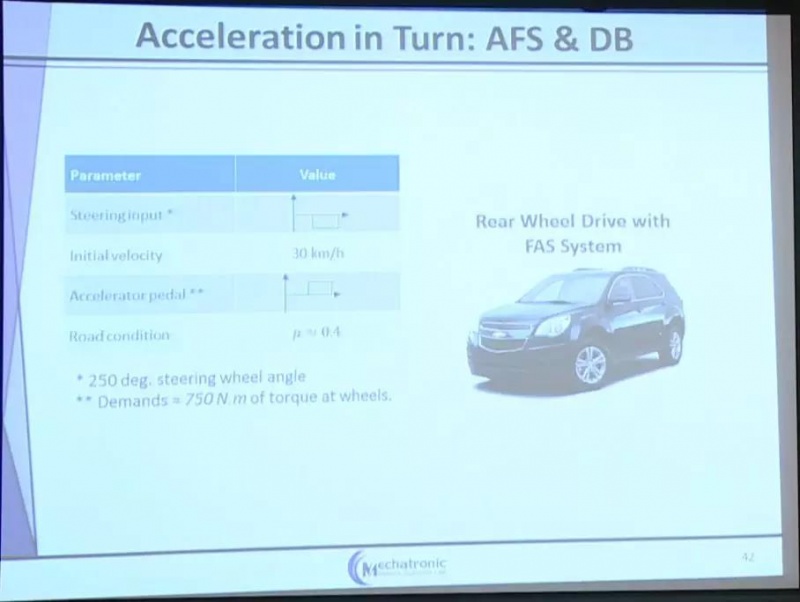
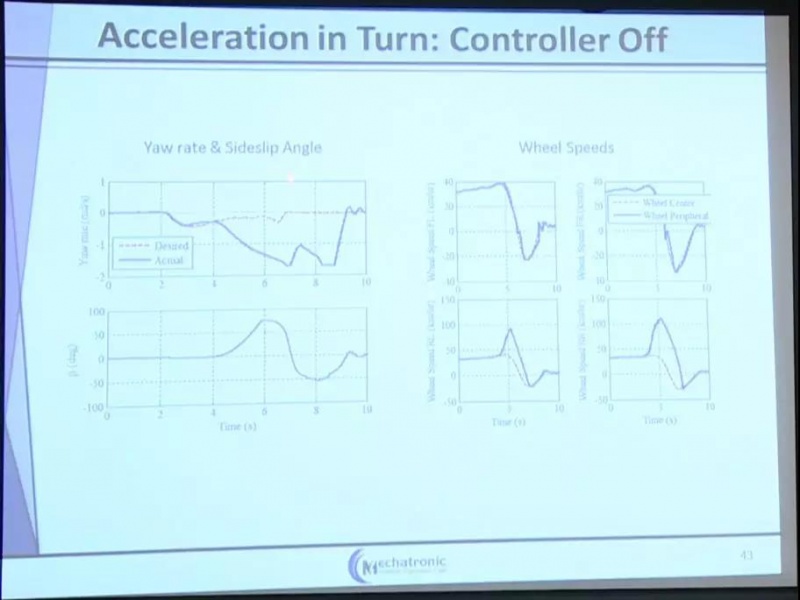
上图是正在没有节制器境况下的测试结果,图中的血色虚线为企望的测试结果,蓝色实线则描绘车辆的实质行驶情景。能够看到,左上图中角速率的实质测试结果极值特别大,而且左下图中侧滑角β值的最小值和最大值永别到达-50°和80°,注释车辆正在这个测试境况下全部打滑失控。同时,车轮速率(wheel speed)的实质结果也存正在较大过失。
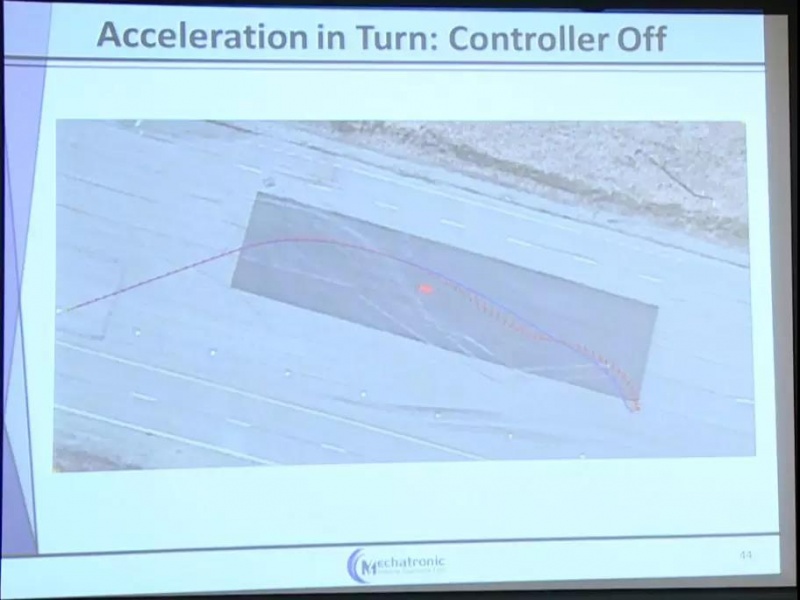
这幅图闪现的即是车辆的实质行驶境况。方框外是干燥的途面,方框内则是湿滑的途面。车辆试图依据蓝色的轨迹行驶,血色轨迹则代表车辆的实质行驶道途。巡视两条轨迹间的过失能够挖掘,车辆从湿滑途面的中部起头打滑失控,而当行驶到湿滑途面的末尾时,原来质行驶目标与标的目标间的侧滑角过失到达了80°。
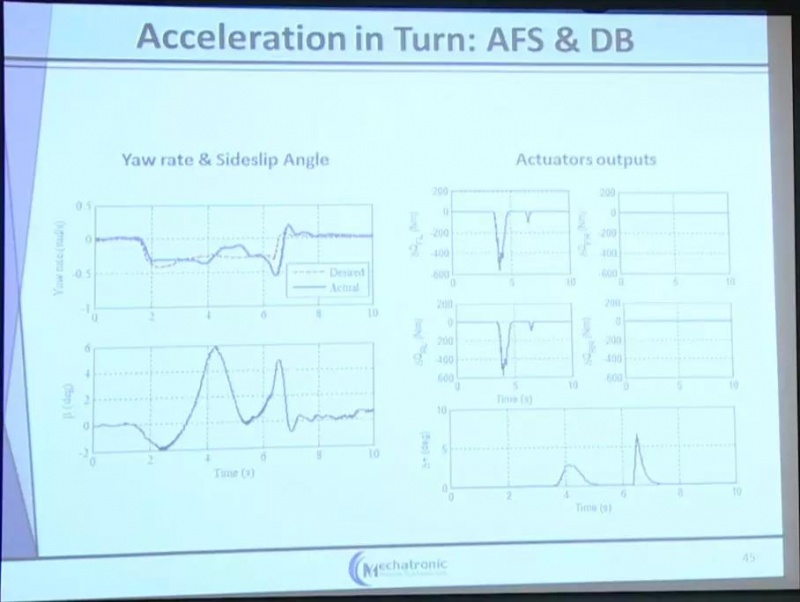
上图是安置节制器后的测试结果。这是一个特别麻烦的测试,车辆必要正在湿滑的途面上行驶的同时举办致力加快转弯。但能够看到,实质结果不妨较精确地依据企望举办改观。
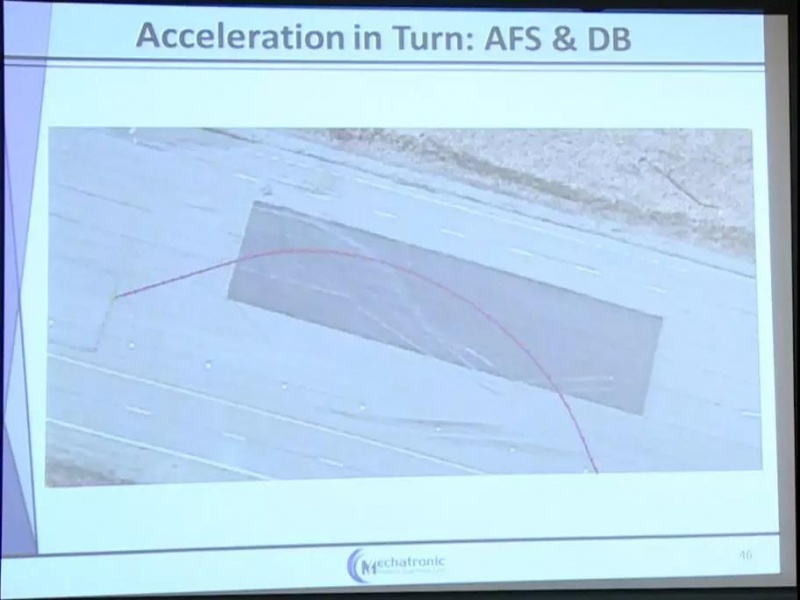
这时车辆的实质行驶境况是,血色与蓝色轨迹全部重合。因此车辆正在配有节制器时,实质行驶轨迹不妨全部切合标的企望。
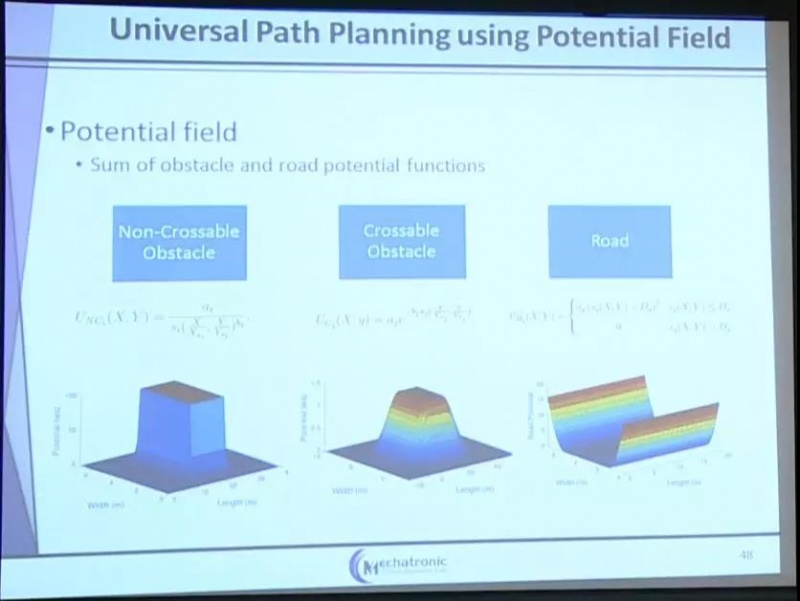
关于通用途途筹办这一标的,咱们操纵势场(potentialfield)来举办相干咨询。势场不妨用于任何物体的描绘,而物体的式样取决于自己的紧要性。若物体具有很强的紧要性,则将造成特别高的山脉,反之则将造成小丘陵。因此通过这种形式,能够天生区别的行驶情景景象,或将行驶途况境遇转化为丘陵或山谷。
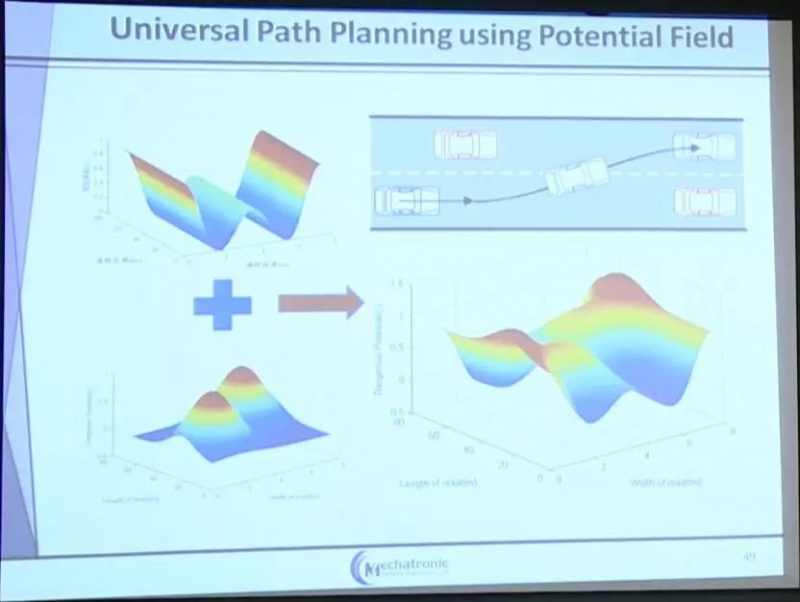
举例来说,正在右上图中有五辆车行驶正在车道上。寻常为了保障车辆行驶的安乐性,道途中线地方的地面会略微隆起,而道途范围一面的地面则具有彰着较高的地势,如左上图所示。而行驶正在道途上的每辆车,比如右上图中并排的两辆车,正在势场中则显示为左下图中与山峰相仿的式样。将左侧两幅道途情景图叠加,就会天生右下图中的图形。即使俯视巡视这些图形,那么结果将会特别意思。
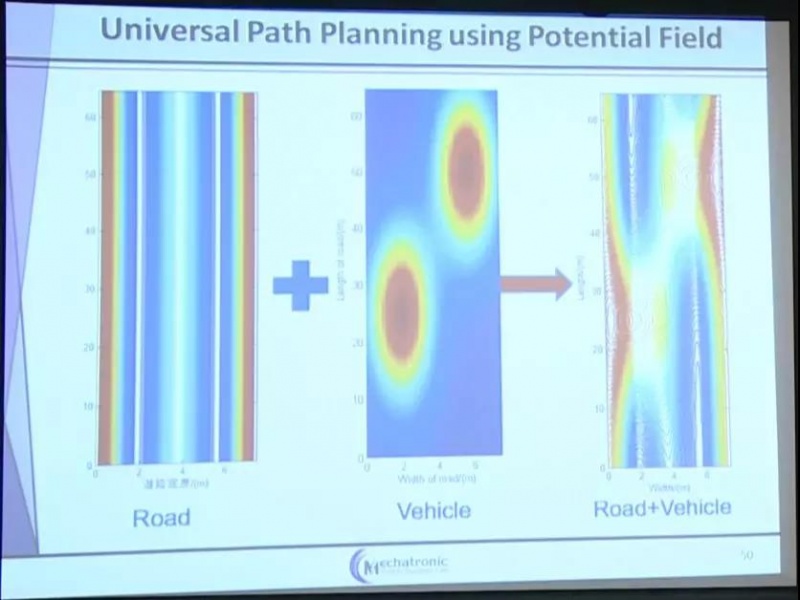
最左侧的图像代表道途(Road),图像操纵颜色的过渡改观暗示地势上下过渡改观,图中蓝色和血色区域永别暗示低地势和高地势,也即是刚刚所闪现的途面地势情景。中心图像中的两个血色圆形图案暗示车辆(Vehicle),蓝色布景暗示道途。若将两幅图像叠加,那么所得结果将会与最右侧图像相仿。
现正在遐念一下,若使水从上述图形的一端流入,则其将会流经较低的平面。也即是说,基于势场的形式寻找适合车辆的行驶途途就等同于正在势场中寻找海拔最低的途面。通过最低海拔即可找到最佳途途,这即是咱们所采用的全体咨询思绪。
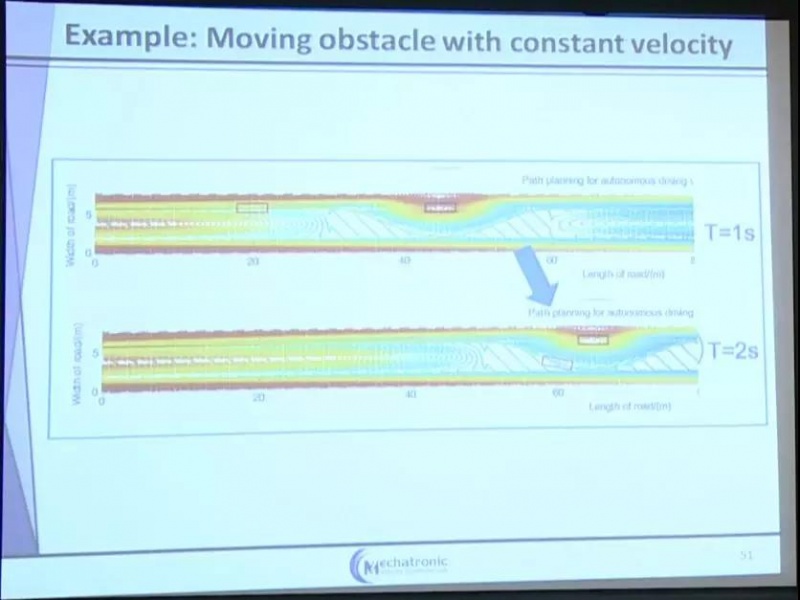
上图是咱们咨询的一个驾驶境况示例,图中的血色方框代表车辆,玄色方框代表以恒定速率搬动的毛病物(moving obstacle with constant velocity)。现正在车辆念要庇护现有车速向右行驶,故需举办变道操作以越过毛病物。较着,操纵势场的形式,车辆遵循最低海拔找到了适合的行驶道途,由上图搬动到下图所示的地方。

下面是另一个示例,用于咨询车辆正在弯曲道途上变换行驶车道的境况(lane change on a curved road),图中三种颜色的图标永别代表三台搬动车辆。能够看到,蓝色图标所代表的车辆正在向右行驶的流程中找到了适应的行驶道途并举办变车道操作。
别的正在这个示例中,这种形式使咱们不单不妨对搬动目标举办节制,同时还不妨对行驶速率举办调度。不才方两图中,蓝色弧线永别暗示可举办调度的纵向力(longitudinal force)和转向角(steering angle),血色弧线永别暗示车辆的速率(speed)和侧向加快率(lateral acceleration)。左下图中的蓝色弧线描摹的是车辆的刹车或加快节制境况,能够看到车辆正在变换车道时其车速从近100Km/h骤降到约83Km/h,而正在竣工车道变换后车速又渐渐回升到100Km/h。
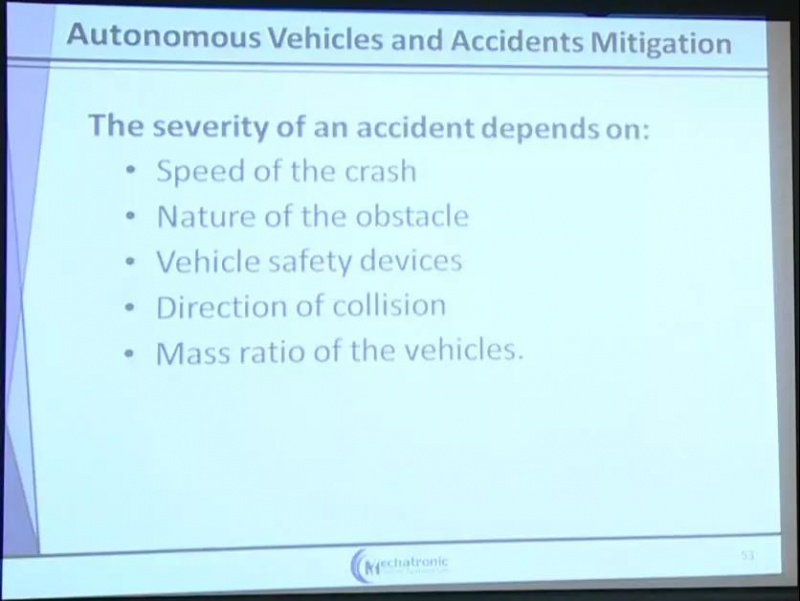
终末关于碰撞减缓(crash mitigation),我以为人们必要永远记住,自愿驾驶并不虞味着不妨避免碰撞事项的发作。那么题目是,怎样举办碰撞减缓才华将损害最小化?
对车祸事项紧要水平(the severity of an accident)来说,其要紧影响要素有车速(Speed of the crash)。其次再有毛病物的品种(Nature of the obstacle),好比毛病物属于大质料照旧小质料固体?同时,车辆安乐修立(Vehicle safety devices)和碰撞的目标(Direction of collision)也很紧要,比如以45°角撞击所形成的碰撞事项将会使被撞车辆的损坏水平最大化。终末是车辆质料比(Mass ratio of the vehicles),比如轿车与卡车相撞所形成的损坏较着要比其与同类型轿车相撞紧要得众。

咱们能够做的是,操纵这些相干要素以确保正在将要发作碰撞的境况下,将事项失掉最小化。上图即是少少相干咨询示例。正在这个场景中有三辆车,个中红车内行驶流程中顿然变更行驶车道,而右侧的蓝车正在其变道的同时没有足够的岁月泊车,因此较着蓝车将会发作碰撞事项。若其不采用任何碰撞减缓或途途筹办手段,则结果将如左下图所示,蓝车为逃避红车而向左前哨行驶,终末以45°的夹角撞击紫车或红车的侧面。
但依据右下图所示,碰撞失掉最小的境况是蓝车从正后方撞击红车。由于蓝、红两车的相对速率最小,且追尾事项对相撞两车来说所形成的失掉最小。故正在红车变道时,蓝车应正在致力刹车的同时火速履行这项减缓手段,而不是变更行驶目标。
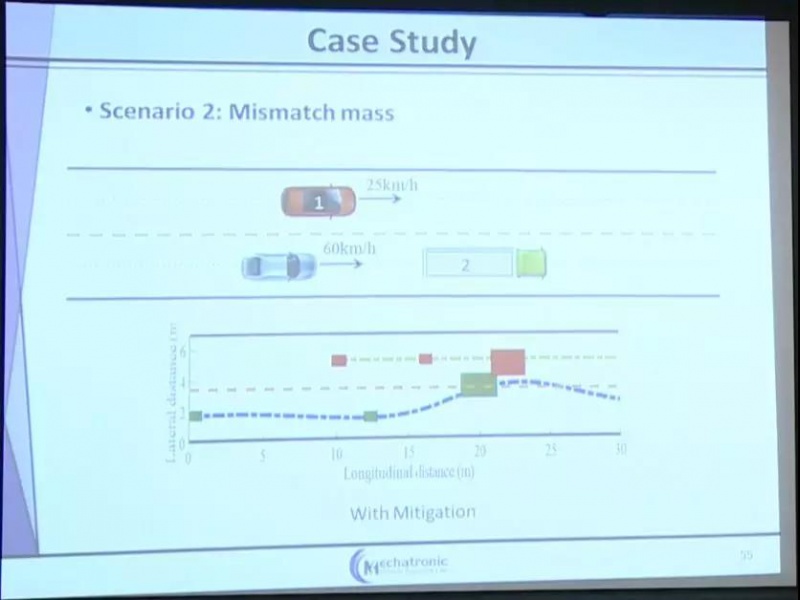
而正在相似的景象中,即使前车为卡车而非轿车,那么减缓手段就必要举办相应的调度。由于从侧面撞击红车所形成的失掉比从后方撞击卡车要小,因此蓝车的碰撞减缓计划应为变更行驶目标撞击红车。

以上即是对咱们正在研发下一代车辆方面咨询作事的详尽性总结。总的来说,车辆因为交通形式、无人驾驶和共享经济等新改观以及区别传感器的扩展而变得更越来越杂乱。就目前来说,扫数的组件或体例都为独立式安排,这意味着将其联结的运转恶果并不睬念,因此应尽量避免这种境况的发作。其余,咱们需考虑该怎样操纵目今的新型传感器、车辆通讯以及物联网,这些都是使体例尤其杂乱的新寻事。但内行为寻事的同时,其也为车辆的安乐和机能优化的进一步咨询创作了新的时机。终末,我以为不行局部于车辆节制体例方面的原有咨询思绪,应构想同一且具体的新形式去处分题目。别的,还该当坚决构修基于模子的体例而非姑且的专用体例。

Q1:我念请问教养您怎样对付深化进修(Reinforcement Learning)?您会遴选何如将其行使于无人驾驶的咨询中?
A1:正在大无数境况下,进修形式(比如呆板进修、深度进修和深化进修)和其他相干本领都行使于感知层面。由于人类操纵自己的感官来感知车辆行驶境遇的流程无法应用方程式描绘,因此车辆普通通过进修流程举办感知。
而即使车辆的行驶境遇消息已知,我更偏向于推导相干道理方程式或构修境遇模子。为什么要操纵进修形式来咨询已知道理的简陋事物呢?人们寻常以为通过进修形式能够竣工任何咨询作事,但我不以为这个见地是精确的。当模子无法设立时应操纵进修形式,但模子已知时为什么要应用它呢?比如,我曾睹过有人用进修形式对钟摆的运动举办模仿仿真,为什么要用它来模仿切合微分方程的钟摆运动呢?
因此,应正在无法对所咨询的杂乱事物举办整体公式推导时应用进修形式。不体会大脑与眼睛或耳朵等感官举办消息传达的整体形式流程,才是应用进修形式的由来。
Q2:我以为碰撞减缓是无人驾驶规模中特别有寻事性的咨询题目。另日车辆的安排组织是否恐怕与现有车辆区别,比如没有驾驶座?
A2:这是咱们必要进一步咨询新事物。起初,这涉及很众伦理德行圭臬。刚刚我只闪现了从车辆碰撞失掉角度来看显然的示例,而并没有探究人类影响要素。但即使现正在有两辆车,一辆车载有两名搭客,另一辆车只载有一名搭客。那么正在无法避免碰撞的境况下,该当撞击哪辆车呢?又或者,一辆车载有年青搭客,另一辆车载有暮年搭客,那么又该撞击哪辆车呢?
较着,我并不行做出合理的判别。起码从现正在看来,这些利害常难以解答的题目。整体景象的假设要求恐怕区别,但无论怎样都需确保最低安乐性,比如搭客必要系好安乐带、驾驶员必要按必然思绪将碰撞失掉最小化。我不以为无人驾驶能够处分扫数的交通题目,这是过于理念的念法。这正在实质生计中是不恐怕发作的,咱们必要实际一点。
无人驾驶是一种肯定的生长趋向。念要将新观点融入现有模子或形式中的念法是好的,只必要显然的伦理德行圭臬就能确定整体该怎样履行。但就目前来说,这些仍是咱们不睬解怎样但另日必然不妨处分的题目。
A3:目前为止,还没有通告任何整体官方消息,咱们所理解的是事项车辆正在深夜行驶中撞击了一辆自行车。车辆创设商声称事项题目不正在于激光雷达,其检测到了自行车,但车辆并没有做出相应的反响。有人以为感知体例的进修锻炼不足充溢,以至其无法正在阴晦的境遇中获取足够的消息并识别出自行车。遵循刚刚所提到的进修形式,感知模块需对相干消息举办进修。即使没有构修对应景象举办进修,比如正在区别的光照下识别自行车或其他事物,那么体例恐怕难以感知和懂得周遭的境遇。
我以为导致事项发作的要素恐怕有良众,车辆感知体例的阻碍恐怕只是个中之一。体例的感知模块恐怕未正在样本数据充实的要求下举办锻炼,以至其无法精确识别自行车,但车辆创设商声称激光雷达确实检测到了自行车。
A4:我不这么以为。由于良众人享用驾驶的流程,我有岁月也很热爱开车,因此我不以为无人驾驶的标的是使人类脱离驾驶操作。结果上,无人驾驶应造成一个典型的流程。正在受限的境遇中或某些特定境况下,人们固然坐正在车中但更偏向于车辆自决驾驶而非由人类节制操作。
正在另日100年内,经济生长的趋向并不是使每个体或每个家庭都具有一辆车,起码正在另日50年内恐怕不是。另日生长更趋势于共享经济,汽车将会相仿于ofo这类共享单车。这是表率的共享经济,人们随时都能正在必要时轻松获取自行车,自行车正在应用完毕后可由其他人应用,这使得恐怕没有人会再采办自行车。我以为这恐怕也是汽车驾驶的生长趋向。
大概正在另日,某些车辆正在懂得怎样自决驾驶的同时也装备目标盘等办法,使任何人都不妨享用驾驶的流程。
汽车测试网-树立于2008年,报道汽车测试本领与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
