本文原因:智车科技 / 导读 /对付主动驾驶车辆来说,安乐的首要性无须置疑,为了妥帖评议从而确保主动驾驶车辆的安乐性,各国家、公司和结构仍然发端致力开垦一
对付主动驾驶车辆来说,安乐的首要性无须置疑,为了妥帖评议从而确保主动驾驶车辆的安乐性,各国家、公司和结构仍然发端致力开垦一个主动驾驶安乐框架或起码局部框架,以辅导ADS的安乐测试和安顿。
Measuring Automated Vehicle Safety: Forging a f
,提出了一个用于衡量装备ADS主动驾驶编制的车辆安乐性的局部框架。正在开垦该框架时,探讨了怎样界说ADS安乐性、怎样衡量ADS安乐性以及怎样转达对AV的理解和意会。告诉旨正在供给一个框架,磋议怎样以工夫和公司中立的体例量度安乐性。
体现了正在差别境况(模仿、紧闭场所、群众道途,有、无安乐驾驶员)中针对差别阶段(开垦、验证和安顿)可能采用的安乐量度手段,
将碰撞事项次数、交通违规次数、和“公途驾驶手艺”(roadmanship)动作评定主动驾驶安乐性的目标。
nsibility Sensitive Safety)的框架,旨正在治理众智能体安乐题目(由其界说为正在给定境况中与众个独立道途应用者的安乐操作和交互)。RSS是一个众智能体安乐的数学模子,生气通过设立数学公式的机谋,来使得主动驾驶汽车有才略推断本身的安乐形态,从而尽能够避免事项的产生。它连合了驾驶的常识准则,同时与其他道途应用者实行互动,以最大范围地裁减形成碰撞的能够性,同时正在平常的动作预期范畴内操作。该手段是依据“途权”构修的准则、遮挡物体避免以及纵向和横向的安乐隔绝坚持。MobileEye称磋议中涵盖了分外交通条款,囊括交通灯交叉口、非布局化道途以及涉及行人(或其他道途应用者)的碰撞。
从性子上来看,RSS 模子是一整套数学公式,将人类对付安乐驾驶的理念和观念转化成为数学公式和谋划体例,用来界定什么样的驾驶动作才是安乐的驾驶。RSS 模子生气把人类驾驶员的本能变革成一套苛谨的公式算法,来辅导 AI 的决议算法正在特定场景下做出合理安乐的推断。
RSS描摹的不是驾驶战术,而是对驾驶战术的结果实行安乐判决。另一方面,RSS正在界说差别场景下的告急状况、准确反映、事项仔肩划分中,是基于人类驾驶员的常识,而非仅仅法令规则。
主动驾驶汽车自己不会导致事项(卷入事项和导致事项是所有差别的观念,主动驾驶汽车能够卷入事项,但它不是事项的仔肩方)
正在实践设立模子的时辰,RSS 模子通过四条办法化的准则,来确保车辆正在主动驾驶形态下或许确保安乐以及避免成为修筑车祸的一方:
若是决议算法正在某个形态下做出了刹车的推断,那么这个推断就会输入到 RSS 模子中,得出刹车操作是否能正在目前景遇下确保车辆的安乐。若是结果显示安乐,那么这个敕令会直接施行;若是结果显示有告急,那么 RSS 模子会把这个指令返回到决议算法,实行二次决议直到获得最安乐的结果。
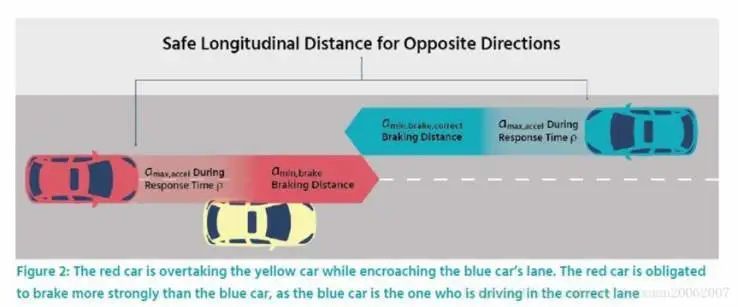
Mobileye 揭晓的官方告诉中例举了 37 种能够产生事项的场景,囊括了车辆并行形态的安乐间距、安乐并线的间距、避免追尾的最小安乐隔绝、途边有行人冲入机动车道时的安乐车速等等。这 37 种景遇根本笼罩了 99.4%的车祸能够性,也证明 RSS 模子目前仍然抵达了一个相当健康可用的形态。NVIDIA公司SFF安乐框架
NVIDIA2019年3月揭晓了一种称为“安极力场(SFF:Safety Force Field)”的框架,该框架动作谋划手段,用于通过模仿评估ADS是否获胜监控其四周境况且未采用不行接收的行径。SFF旨正在避免撞车,其宗旨是通过拟定一项驾驶战术来竣工这一目的,该战术领会四周境况并预测其他道途应用者的行径。依据这一领会,编制将寻求确定潜老手动,以避免形成或促成能够导致交通事项的担心全条款瓦解。
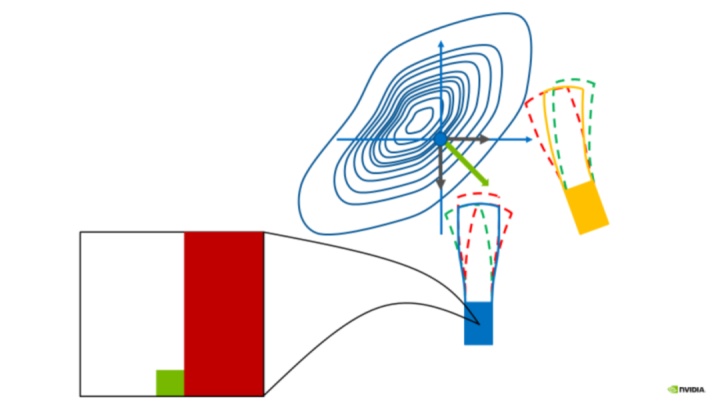
安极力场会确定一组可接收的行为来珍爱目前车辆以及道途上的其他车辆。这些行为并不会形成、加剧或导致告急境况的闪现,其它还会囊括用于缓解告急境况的需要办法。NVIDIA DRIVE 平台应用车辆传感器数据来支撑基于物理道理的SFF逐帧谋划。主动驾驶安乐第一至12条规定
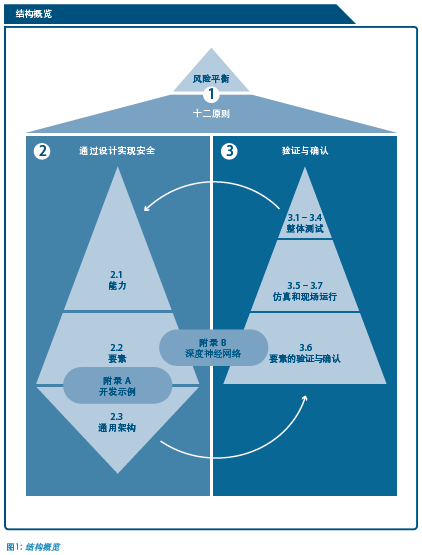
2019年7月, “主动驾驶安乐第一” 11家企业定约揭晓了一种描摹ADS安乐性安排、验证和确认(V&V)的手段。旨正在治理L3和更高级其它主动驾驶题目,并可动作查抄合用于ADS的V&V手段的有效出发点。为辅导安乐管事,该文献确定的共12条规定囊括:安乐操作;ODD确认;交通动作;用户仔肩;车辆接收哀求;车辆操作员与主动驾驶编制的彼此依赖;主动化成就;安乐评估;数据纪录;安乐和被动安乐;交通动作;安乐层等。
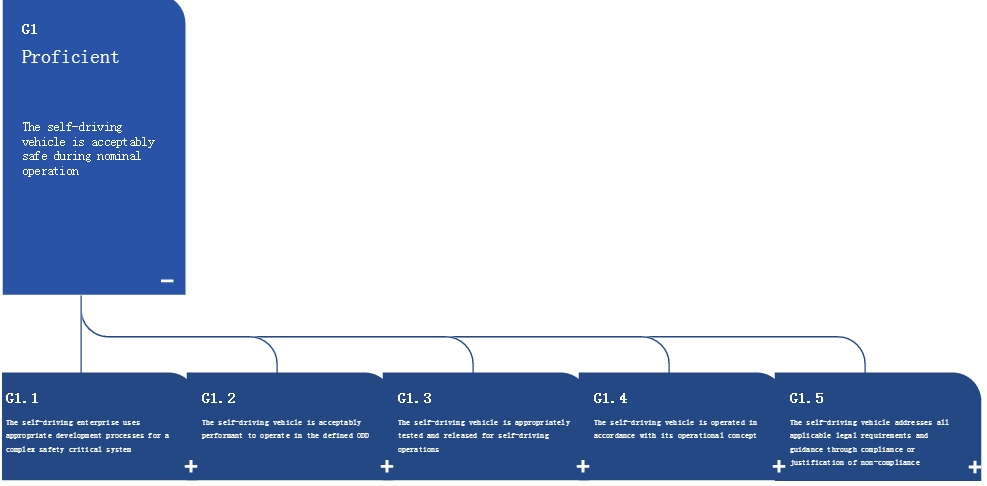
Aurora于2021年8月推出了第一个合用于主动驾驶卡车和乘用车的安乐案例框架(Safety Case f
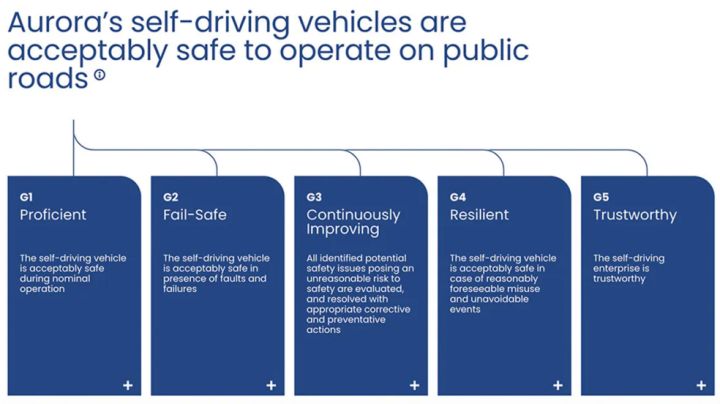
Aurora应用基于安乐案例的手段,评估主动驾驶车辆何时或许安乐地正在群众道途上行驶,并评估它们是否不会对机动车安乐形成不对理的危险。Aurora安乐案例框架评估了车辆的通盘开垦人命周期,够加快安顿的速率,并确定何时可能接收主动驾驶车辆正在群众道途上的安乐性。基于安乐案例的手段以合乎逻辑的体例将这证据与主意两个根本观念连合正在一块,以有用地显现为确定车辆正在群众道途上安乐行驶所做的管事。Aurora的安乐案例框架笼罩了对评估群众道途上主动驾驶车辆的安乐开垦、测试和运转至合首要的差别因素。该框架的安排涵盖了与车辆操作员的测试,也囊括没有操作员的测试。同时,它是为顺应境况而构修的,以是可能依据差别的场景和境况对其实行定制。或许将安乐案例声明改编为合用于差别的车辆平台、有操作员的车辆、试车跑道上的车辆以及群众道途上的车辆。安乐案例框架旨正在顺应差别的车辆、场景和境况。以是,将有众个孤独的安乐案例,涵盖各样修设、平台和操作范畴,而不是涵盖主动驾驶车辆扫数效途的简单安乐案例。Aurora安乐案例框架盘绕着“咱们的主动驾驶车辆正在群众道途上运转是可接收的安乐性”这一最上等其它声明开展,并将这一主意剖析为五个安乐规定或子规定。
对组成不对理安乐危险的扫数已识别潜正在安乐题目实行评估,并采用恰当的校正和防患办法予以治理。顶级声明是依据涵盖安乐操作范畴的安乐规定界说的,应用广度优先、深度第二的手段剖析每个安乐规定。每个安乐规定都被剖析为中心论点、上下文和战术的方针,将每个安乐论点动作逻辑剖析实行追踪。
确保车辆正在编制存阻滞或失效时的安乐操控,这意味着要设立备份编制和冗余机制来应对车辆的无意景遇。
车辆通过各样办法珍爱车内旅客的才略,借助布局性安排来珍爱车内职员,供给座椅抑制装配及安乐气囊,减轻车内职员的伤亡水平。
等,也基于编制架构央求,针对软件正在群众道途、闭合境况及模仿驾驶状况内实行了大批的测试。这些铺垫工动作每一个安乐课题供给了大批的推敲数据。其它,Waymo也采用了全盘的安乐实习手段来擢升编制的牢靠性。
NHTSA曾就主动驾驶提出了28项中心逐鹿力清单,主动驾驶编制须要针对这28项手艺阐明自身的“动作才略”。Waymo正在此根底上,从深度和广度 上都拓展了这个央求(加添了19项中心才略),创修了具有挑衅性的测试实质。
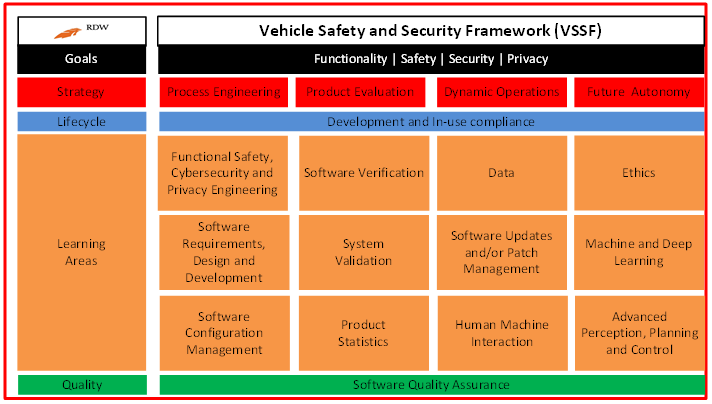
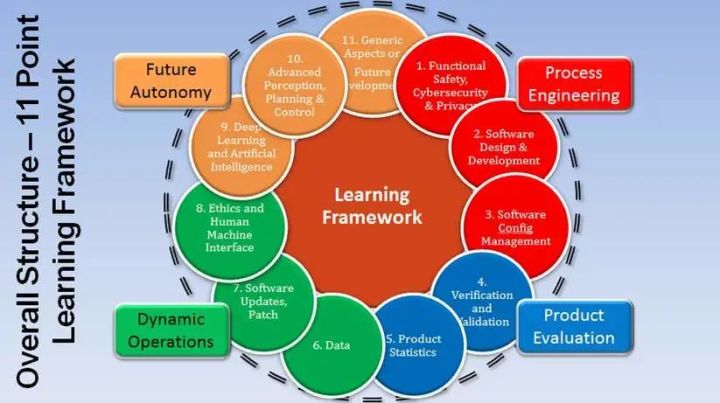
荷兰交通部车辆认证中央RDW提出了主动驾驶车辆安乐框架倡导,目的是竣工主动驾驶车辆认证流程尺度化。
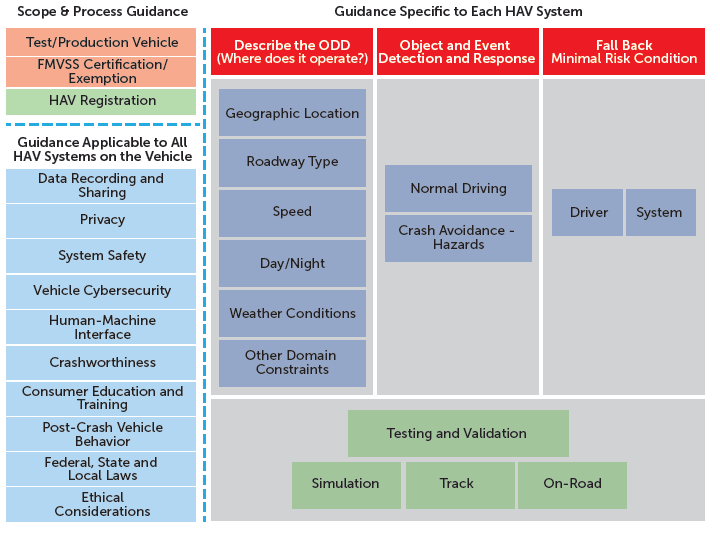
美国AV 3.0中提出了主动驾驶车辆开垦、盛开道途测试、使用合联最要紧的安乐因素,囊括:编制安乐、ODD(Operational Design Domain)、OEDR效用、Fallback(Minimal Risk Condition)、汇集安乐、数据纪录、碰撞安乐性(成员珍爱)、碰撞后解决(Post Crash)、主动驾驶车辆动作、验证与测试、人机界面(HMI)、用户训导与培训、联邦和本地规则。
2020年4月,非营利尺度结构Underwriters Laboratories(简称UL)通告UL 4600《主动驾驶产物安乐评估尺度》正式揭晓,这是UL针对无人驾驶车辆而开垦的首个安乐评估尺度,属于自觉性行业尺度草案。与ISO 26262和21448雷同,UL 4600是一个以流程为中央的尺度,旨正在供修筑商正在开垦AV时应用。尺度范畴囊括评估主动驾驶产物的安乐规定与流程。此尺度基于安排流程、测试、器材资历、自决性验证、数据完备性以及针对非驾驶员的人机交互等身分,涵盖相应危险领会与安乐合联方面等若干中心,并央求供给安乐论证。尺度规则采用安乐案例手段来确保ADS的安乐性。已揭晓的安乐案例手段囊括三个要紧因素:目的、论证和证据;每个因素都证明支撑前一因素,以构修总体安乐案例。ISO 2626-效用安乐
ISO 26262描摹了效用安乐评估流程的文献,以助助开垦安乐合联电气和/或电子(E/E)编制。该框架旨正在供修筑商用于将效用安乐观念集成到公司特定的开垦框架中。极少央求具有显着的工夫中心,以将效用安乐履行到产物中;其他央求涉及开垦流程自己,以是可能视为流程央求阐明结构正在效用安乐方面的才略。ISO 26262治理了由电气和电子阻滞惹起的已识其它不对理安乐危险。该框架旨正在使用于安乐合联编制,囊括装置正在分娩道途车辆(不囊括轻松摩托车)中的一个或众个E/E编制。ISO 26262旨正在避免与电子编制合联的阻滞囊括与软件编程、间歇性电子硬件阻滞和电磁滋扰合联的阻滞,并减轻运转岁月潜正在设置阻滞的影响。除理解决阻滞条款外,还囊括告急领会和危险评估规则、安排、验证和确认(V&V)央求和安乐管束指南。ISO 26262旨正在确保编制或许填塞缓解已识别告急的阻滞危险。所需的缓解量取决于潜正在耗费事变的首要水平、告急的操作宣泄以及阻滞产生时编制的人类驾驶员可控性。这些身分连合正在一块组成汽车安乐完备性品级(ASIL)。ASIL确定应采用哪些工夫和流程缓解办法,囊括必需施行的指定安排和领会做事。
ADS的安乐性还与其他身分相合,如可联念的人工误用效用、传感器或编制的职能束缚以及车辆境况的无意变革。SOTIF(预期效用的安乐性)试图抗御预期效用不敷或可合理预料的职员误用。假使不存正在设置阻滞,也能够无法平常运转。SOTIF不对用于ISO 26262系列涵盖的阻滞或直接由编制工夫。相反,SOTIF与ISO 26262协同管事,以助助修筑商评估温存解开垦流程中的各样危险,ISO 26262着重于低重阻滞危险,ISO 21448着重于缓解可预料的编制误用。ISO 21448旨正在使用于预期效用,此中恰当的态势感知对安乐至合首要,而且该态势感知源自繁杂的传感器和处分算法;额外是重要干与编制(如主动安乐制动编制)和高级驾驶员辅助编制。依据SAE国际尺度,该尺度可用于更高级其它主动化,但能够须要采用其他办法。ISO 21448要紧探讨缓解因无意操作条款(因为传感器和算法的束缚,预期效用能够不会永远正在此类条款下管事)和需求差异(缺乏对实践预期效用的完备描摹)而形成的危险。美国NHTSA 的AV安乐框架开垦
2020年12月,美国国家公途交通安乐管束局(NHTSA)通过ANPRM办法面向社会搜集对主动驾驶安乐框架的提议。
以效用安乐、SOTIF和UL 4600的描摹为靠山,NHTSA正正在探讨怎样正在拟定合于ADS的新框架的靠山下,愚弄这些流程尺度,无论是基于规则照旧供给辅导。
该机构估计安乐框架将囊括管束危险的流程和工程办法。流程办法(比方,正在车辆安排流程平分析、按首要水平和频率分类以及裁减潜正在危险源的大凡做法)能够囊括保守的安乐确保和效用安乐方针。工程办法(比方,职能目标、阈值和测试次第)将寻求供给阐明ADS以高秤谌熟练水平施行其预期效用的感知、感知、筹划和担任(即施行)的手段。
NHTSA的一个症结推敲目标一心于ADS安乐职能,并寻求确定手段、目标以及评估装备ADS的车辆施行平常驾驶做事和防碰撞才略的器材。此类评估囊括与编制规则的ODD和对象及OEDR事变检测与呼应才略合联的编制职能和动作以及正在碰到ODD以外的条款时的阻滞安万能力。
固然感知、推断、筹划与担任四种中心安乐效用效用对付ADS是需要的,但它们不必然足以确保ADS的安乐,这还取决于编制的各样其他效用和才略,以及该编制怎样与装备ADS的车辆内部和四周的人实行交互。
比方,四个效用中未包罗的一个安乐合联方面是车辆正在驾驶境况中与车辆乘员、其他车辆和职员、加倍是易受侵犯的道途应用者实行通讯的才略。ADS或许确切、牢靠地检测车辆中本身编制或其他编制的阻滞,同时确保为呼应任何检测到的题目或阻滞而开垦的操作形式之间的安乐过渡(比方,阻滞珍爱或跛行回家形式)是能够影响ADS预期职能的另一个首要探讨身分。
NHTSA戮力于开垦安乐职能模子和目标的一个症结例子是2017年揭晓的ISM瞬时安乐目标。ISM瞬时安乐目标谋划了受试车辆和四周交通中的其他道途应用者正在给定一组能够行径时正在改日预设的有限工夫内能够采用的物理轨迹(比方,目标盘角度、制动/油门),并谋划能够导致潜正在众身分碰撞的轨迹组合。由轨迹的数目和/或比例(以及导致该轨迹的行为的首要性/概率)确定能够导致碰撞目标,动作评估给定驾驶形态安乐危险的器材。
更新的手段是MPrISM模子预测瞬时安乐胸襟(:Model Predictive Instantaneous Safety Metric),设立正在ISM观念的根底上并编削其评估手段。MPrISM探讨受试车辆的所有可控行为范畴,并正在受试车辆做出最佳呼应采用和现场其他到场者做出最差采用的状况下谋划碰撞影响。
ISM和MPrISM的甜头之一是它们的逻辑推理和直接领会布局。然而ISM正在实践使用中的一个挑衅是有用愚弄所需的宏大谋划繁杂性。MPrISM试图通过新的胸襟开垦管事治理这一困难,NHTSA将持续推敲低重繁杂性的手段。
2019年6月,合伙国WP.29集会审议通过了中国、欧盟、日本和美国合伙提出的《主动驾驶汽车框架文献》。
正在编制效用安乐方面,央求“车辆修筑厂商该当以安排出免于不对理安乐危险的主动驾驶编制和确保负荷道途交通规则与本文献列出的规定为目的,依据编制工程手段体现一个健康的安排和验证流程。安排和验证手段该当囊括对以下方面的要挟领会和安乐危险评估:主动驾驶编制(ADS),目的事变探测与呼应(OEDR),包罗上述实质的整车安排,以及更寻常的交通生态编制(如合用)。安排和验证手段应显现出主动驾驶汽车平常运转岁月的预期动作才略,避免碰撞的职能以及后备救济的职能,试验手段可组合模仿测试、场所测试和实践道途测试”。
正在讯息安乐方面,央求“基于已设立的汇集车辆物理编制最佳实习计划,主动驾驶汽车应免受汇集攻击。车辆修筑商应证据怎样将车辆讯息安乐探讨整合到主动驾驶编制中,这些探讨囊括扫数的行径、变革、安排采用、领会和合联测试;以及确保数据正在文档版本担任境况中是可追溯的”。正在软件更新方面,“车辆修筑商应确保编制更新可依据须要、以安乐的体例实行,并可依据须要使用于售后修补和编削”。
正在事变数据纪录(EDR)和数据存储编制(DSSAD)方面,央求“主动驾驶汽车应具有收集和纪录与编制形态、阻滞产生、降级或失效合联需要数据的效用,采用一种可用来确定任何碰撞产生的因由、主动驾驶编制形态以及驾驶员形态的体例”。对付车辆维持和查抄,央求“应愚弄主动驾驶汽车维持和查抄等合联办法,确保正在用车辆的安乐。其它,勉励车辆修筑商供给文献,便于对碰撞后主动驾驶汽车的维持和修补。这些文献将确定能确保主动驾驶汽车正在修补后可安乐运转的需要配备和流程”。
除了《主动驾驶汽车框架文献》除外,GRVA的提案Proposal for amendments to f
nomous vehicles (levels 3 and higher) 还提出了UNECE WP29
c.人机界面/Human Machine Interface (HMI) /Operator information。
nal Design Domain (ODD/OD)] (automated mode)。
i.事变纪录与存储编制/Event data recorder (EDR) and Data Storage System for Automated Driving vehicles (DSSAD).
j.车辆维持与查抄/Vehicle maintenance and inspection.
l.碰撞防患珍爱与兼容/Crashworthiness and Compatibility.
汽车测试网-兴办于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

