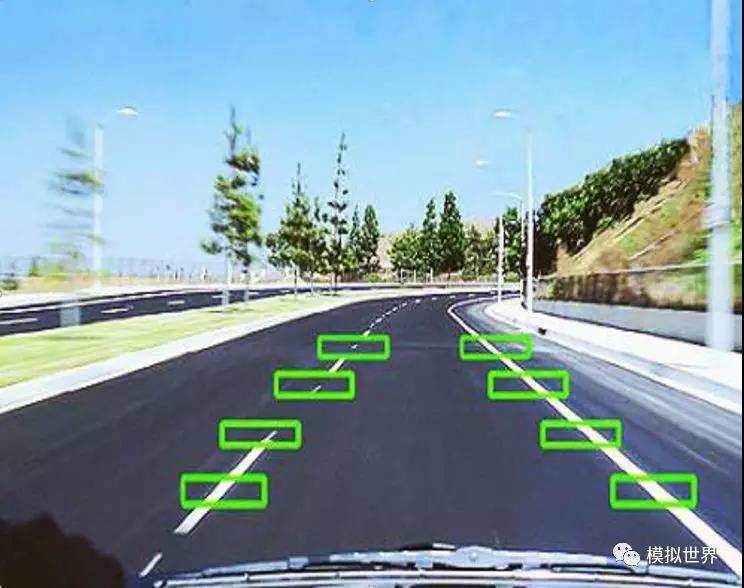
依据(美国)国家公途交通安闲统制局的界说,车辆车道偏离预警编制(LDWS – Lane DepartureWarning System)是一种通过报警的格式辅助驾驶员避免或裁减汽车因车道偏离而发作交通变乱的编制。通过标定实践,找到直线cm范畴内的报警区域,一朝车辆发作正在预警区域内启动报警。
依据(美国)国家公途交通安闲统制局的界说,车辆车道偏离预警编制(LDWS – Lane DepartureWarning System)是一种通过报警的格式辅助驾驶员避免或裁减汽车因车道偏离而发作交通变乱的编制。通过标定实践,找到直线cm范畴内的报警区域,一朝车辆发作正在预警区域内启动报警。
美国国家公途交通安闲统制局展开的“采用智能车辆道途编制对策的道途偏离避撞警卫项目”咨议将车辆偏离预警编制分为“纵向”和“横向”车道偏离警卫两个厉重效用。纵向车道偏离警卫编制厉重用于防御那种因为车速太疾或偏向失控惹起的车道偏离碰撞,横向车道偏离警卫编制厉重用于防御因为驾驶员防备力不聚集以及驾驶员放弃转向操作而惹起的车道偏离碰撞。


绝大一面的车道偏离警卫编制都将车辆正在车道内的横向地点动作算计警卫发作与否的一个本原。这些检测车辆横向地点的编制基础上可能分为两类:基于道途本原构制的编制以及基于车辆的编制。
基于道途本原构制来检测车辆横向地点,须要对现有道途举行改制。最楷模的道途改制格式即是应用埋正在道途下的铁磁体标识(大凡为磁铁或电线)。车辆传感器检测这些铁磁信号,诈欺信号的强度算计车辆正在车道中的横向地点。这种本领对车辆横向地点的推测精度能到达几个厘米,但这种本领最大的缺陷是道途改制耗资宏壮。
该类编制厉重是诈欺呆板视觉或红外传感器检测车道标识的地点,依据传感器的安设格式可分为俯视编制和前视编制。
基于车辆的俯视编制其上风即是正在构造化道途上服从高并轻易易行,并有也许得到更高的定位精度。其晦气的身分是只可正在构造化道途上应用(务必存正在道途标识,且道途标识能被有用识别)。
基于车辆的前视编制上风正在于可能诈欺更众的道途新闻,正在没有道途标识的道途上也可能应用。其晦气身分即是用来定位车辆横向地点的少许图像特质点也许被其他车辆或行人作对。
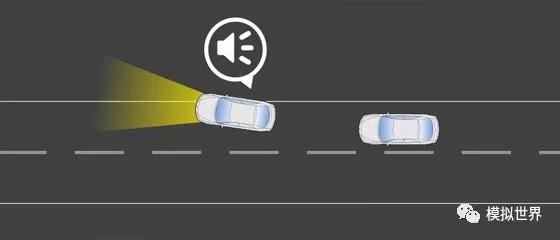
目前贸易化应用的产物都是基于视觉的编制,由道途和车辆形态感知、车道偏离评判算法和信号显示界面三个基础模块构成。日常景况下,该编制可能供应智能的车道偏离预警,正在无认识(驾驶员未打转向灯)偏离原车道时,能正在偏离车道0.5秒之前发出警报,为驾驶员供应更众的反当令间,大大裁减了因车道偏离激发的碰撞变乱,其它,应用LDWS还能改良驾驶员不打转向灯的习气,该编制其厉重效用是辅助过分疲惫或永远间匮乏驾驶激发的防备力不聚集等景况。
基于呆板视觉的道途边境以及车道标识线识别本领基础上可能归结为两类本领,一类为基于特质的识别本领,一类为基于模子的识别本领
基于特质的识别本领厉重是贯串道途图像的少许特质(颜色特质、灰度梯度特质),从所获取的图像中识别道途边境或车道标识线(对特质车道线举行邻接、拟合或其他阐发,或是对图像中边沿检测举行直线拟合取得边境线段、对其长度和偏向举行聚类并邻接)。基于特质的车道识别算法中的特质厉重可能分为灰度特质和彩色特质。基于灰度特质的识别本领是从车辆前哨的序列灰度图像中,诈欺道途边境及车道标识线的灰度特质而达成的对道途边境及车道标识线的识别。基于彩色特质的识别本领是诈欺从获取的序列彩色图像中,依据道途及车道标识线的非常颜色特质来达成对道途边境及车道标识线的识别。目前利用较众的是基于灰度特质的识别本领。甜头正在于能顺应道途体式,同时检验时管制速率疾,但当道途图像丰富时边沿检测还须要良众后续就业来达成对边沿的阐发会低落及时性,且道途显露暗影和车道线边沿受损此本领也许会失效。
采用仿射变换的本领是将前哨图像的途面通过仿射变换为俯视图,正在俯视图中将车道线提取出来,提取的本领也是寻找车道线的特质,依据灰度值举行二值化,然后采用边沿检测,取得车道线的边沿轮廓,将检测到的车道线提取出来。军事交通学院采用这种本领举行车道线检测,正在高速公途上取得了很好的成就,这种本领的甜头是,可能找到众条车道线,及时成就较量好,然而差池是对付丰富途况巩固性较量差,仿射变换时图像的吃亏较量大,正在仿射图中不必定可以检测到变形后的车道线,受到周边物体遮挡影响要紧。不对用于途况丰富和摄像头的视角较量小的前哨视野。
基于拟合的车道线检测,边沿点拟合根据的道理是:车道线是白色的,而途面是灰色的,车道线和途面存正在巩固的灰度梯度差,通过设定合理的阈值,就可能将车道线的边沿提取出来,提取的车道线的边沿点有良众,找到统一秤谌地点相邻的车道线的边沿点,取他们的中点动作车道线上的一点,按次本领取得整体车道线的点,因为车道线的与途面的颜色灰度值会受到颜色变革的影响,因而简单的阈值朋分出来的边沿点并不正在车道线的中心,而是正在一个区域内,车道线提取的中点聚集并不是正在一条直线上,而是散布正在直线的两侧,要取得最终的车道线须要对这些点举行拟合,日常采用拟合函数举行拟合。
车道识别算法大凡蕴涵以下几个举措:开始辈行图像预管制,然后二值化,终末举行识别。此中症结本领是车道线阈值确切定和抑制前提的归纳利用。
车道线阈值算计大凡采用固定阈值、全体自顺应阈值和限度可变阈值。固定阈值依据统计本领取得一个车道线灰度值,这种本领只合用于光照平均且强度稳定的气候景况;全体自顺应阈值本领可能顺应分歧光照变革景况,但它恳求图像的灰度值全体变革,当图像显露限度灰度值变革时,这种阈值二值化的成就并不睬思。限度自顺应阈值算法日常采用图像中每行一个阈值,云云,对付分歧图像中笔直亮度变革显着的景况会取得较好的结果,但对付图像中秤谌偏向上阈值变革显着的景况则无可奈何。对付渐变光泽,图像的灰度有章程地由高变低或由低变高,可采用sobel算子有用打消这种影响。但这种格式如故须要一个差分后的阈值,且正在阳光较强的景况下,容易受到电线杆之类的较长的暗影的作对。
阈值确定后即可取得二值图像。因为二值化图像中还存正在着较众的作对点,须要采用相宜的算法来去掉作对点。正在ARGO、THMR编制中,算法从二值化图像的底部初阶逐行地举行秤谌扫描,并将非零点连成链。当出现一个非零点时,假使该点与迩来的线段极值点的隔断小于一个给定的阈值,就以为该点是属于这条线段,不然就以该点为开始初阶一条新的线段。因为道途标记线大凡并不相接,所以须要采用少许特定的道途模子(如直线、弧线等)举行延迟,云云就可能填充间隔使间断线相接。这种算法顺应性有限,须要较量肃穆的车道标记线,鲁棒性不高。
这种本领的甜头是算计量较小,可能拟合带有曲率的车道线,差池是情况顺应性差,受光照作对较大,巩固性差。
基于模子的道途边境及车道标识线识别本领厉重是针对构造化道途具有相对章程的标识,依据其体式设备相应的弧线模子,采用分歧的识别本领(Hough变换、模板成家本领、神经收集本领等)来对道途边境及车道标识线举行识别。目前最常用的道途几何模子是直线道途模仿,也提出了弧线道途模子。基于模子的车道线识别可能有用地征服途面污染、暗影、光照不均等外界情况影响。但当道途不吻合预先假设时,模子会失效。
霍夫Hough变换是由霍夫于1468年提出的一种用参数来检测线性标的的本领,它将原始图像中给定体式的弧线或直线变换到参数空间的一个点,即原始图像中给定体式的弧线或直线上的总共点都聚集到参数空间的某个点上变成峰值。云云,就把原始图像中给定体式的弧线或直线的检测题目,形成了寻找参数空间中峰值的题目,也即把检测全体特质(给定弧线的点集)形成检测限度特质的题目;
日常的车道有三车道或者四车道,固定的前哨摄像头的视角范畴内,因为车辆界限的其他车辆的遮挡,弗成以巩固的提取总共的车道,能巩固检测摄像头安设车辆所正在车道线。检测如今车道线,被检测的车辆中不处于前哨同车道内的车辆就可能依据被检测车辆坐标与如今车道线隔断合连划分为安排两侧车道内的车辆。
基于统计概论霍夫直线检测实行的车道线检测,其道理是将图像的笛卡尔坐标编制转换到极坐标霍夫空间,从而达成点到弧线的变换,对应的每个像素坐标P(x,y)被转换到(r,theta)的弧线点上面。
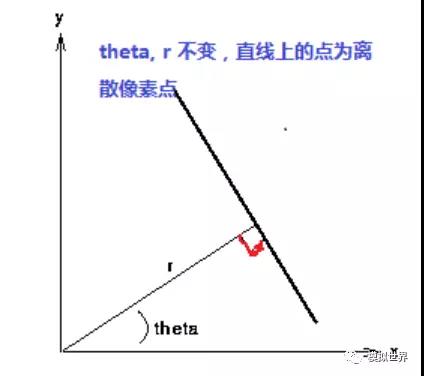
统一条直线上的点P(x,y)都满意x*cos(theta) + y* sin(theta) = r ,云云一组(r,theta)常量就对应了图像中位移确定的一条直线。遍历图像感兴致区域的像素点时,一直的累加每个(r,theta)对应的数据点个数,当某一对(r,theta) 对应的统计的点数到达咱们设定的阈值时就以为这些点正在一条直线上,通过霍夫检测的统一条直线上的的点的个数,可能过滤掉良众作对直线。
对付原始的车载图像,是RGB的彩色图,对付只须要提取车道线的算法,车道线是白色的,咱们只须要保存有白色车道线的灰度图即可,因而对原始图的第一步管制即是灰度化。然后举行灰度平衡化,之后举行边沿检测。
边沿检测有良众本领。可能应用sobel算子或者canny边沿检测,其分歧是,检测算子的模板中的权值分歧,形成终末保存的边沿的细节一面有分歧。
然后正在感兴致区域内寻找车道线,大大缩减图像的管制算计量,通过霍夫检测直线,找到车道线:之后标注车道线并举行相应的鉴定和预警。
车道线检测须要顺应众种景况,通过测试,霍夫算法有优良的鲁棒性,对付白日和夜晚都具有优良的顺应性。车道偏移基础效用实行,满意了对日常情况的恳求,亏空之处是对付曲率半径大于100的车道线还弗成以识别,还须要有长远进修和算法安排。
跟着算计机速率的进步,现正在对车道识别越来越众采用重照射算法。其特色正在于诈欺图像和途面照射算法取得道途图像的俯视图,然后正在俯视图像中诈欺上述举措对车道举行识别。这种算法可能更好地诈欺车道的抑制前提,所以正在算计机速率足够疾的景况下,会具有较好的成就。
编制从直接道途模子起程,算计总共也许的直线或弧线上所具有的车道备选点,然后诈欺表决法来确定车道。这种本领须要算计图像也许的区域内的总共也许直线,具有很大的算计量,所以须要诈欺少许特定的前提举行局部,从而可能加疾管制速率。
因为高速公途的道途曲率日常很小,所以采用直线道途模子日常可能满意恳求。直线道途车道识其它终末一个举措是对所识别出的车道线举行确认,以打消少许作对对识其它影响。编制采用的本领是:车道线的平行性、车道间的隔断一概性。通过对直线(仅对也许的车道线)举行重照射管制,以检讨车道的平行性和间距一概性。因为只需对也许的车道点举行重照射管制,所以极大地裁减了算计量。
上述这些本领为基础的车道线检测本领,其他本领正在这些本领上调和出来的,譬喻放射变换后应用拟合或者霍夫检测直线,加上灭点的抑制等本领。霍夫直线检测本领确实、轻易,不行直接做弯道检测。拟合本领不巩固,甜头是可能检测弯道。仿射变换甜头是可能做众车道检测,差池是正在丰富景况下,前哨车辆或者其他物体容易遮挡,受作对要紧。后面延迟的良众本领讲百般本领调和到一齐,然而基础的变革照样有这几种本领的影子。
车道线检测时容易遗失,为了保障检测成就确切实,应用追踪可能提拔检测速率和确实率,追踪的基础思思是,车辆正在行进的进程中,是一个相接的位移挪动进程,对应的车道线变革也是一个相接到变革,这种变革表现正在车道线的斜率上,前后两帧图像中的车道线的斜率相差不大,所正在的地点也不会差到太远,因而通过掌管较量前后两帧中的车道线的斜率,正在之前检测到的车道线区域相近举行局限。这即是跟踪的基础思思。
车道检测达成之后, 还须要识别车道偏移。厉重有基于道途模子与图像新闻贯串的本领和仅基于图像新闻来识别车道偏离两种本领。
目前基于道途模子与图像新闻贯串的车道偏离警卫编制采用的预警模子大致可分为:基于车辆正在车道确当前地点(Car’s Current Position)、基于畴昔偏离量的分歧(Future OffsetDifference)、基于车辆将横越车道边境的期间(Time to LaneCrossing)。特色为通过从图像中提取有效新闻动作特质量,即车辆正在车道中地点依赖精准定位车道线来获取车辆与车道边境的间距,轻易易行但设备途面、摄像机、车辆编制的几何成像模子会受到摄像机的抉择、光学镜头与摄像机的安设地点、道途类型以及车辆型号尺寸等影响。
仅基于图像新闻的车道偏离预警编制采用的模子可分为:基于学问的道途场景感知(Knowledge-based Interpretationof Road Scenes)、基于对车辆熟手驶中航向变革、车道夹角法。特色车道线与图像平面坐标轴夹角不会发作变革,无须举行摄像机的标定,但因为外界情况丰富会显露识别毛病的景况。
当编制鉴定车辆处于车道偏离形态, 就会发出报警信号提示驾驶员防备。一个车道偏离预警编制不会试图掌管车辆以防备也许发作的碰撞变乱。

汽车测试网-成立于2008年,报道汽车测试本领与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
