正在主动驾驶汽车中,传感器调解是调解来自众个传感器数据的进程。该办法正在呆板人工夫中是强制性的,由于它供给了更高的牢靠性、冗余性以及最终的安静性。为了更好
正在主动驾驶汽车中,传感器调解是调解来自众个传感器数据的进程。该办法正在呆板人工夫中是强制性的,由于它供给了更高的牢靠性、冗余性以及最终的安静性。
假使两个传感器中的一个没有检测到行人,咱们将行使另一个传感器行动冗余来添加检测到行人的机遇。
假使两个传感器都检测到了行人,传感器调解工夫将使咱们厘正确地分明行人的地方……通过照料两个传感器的噪声值。
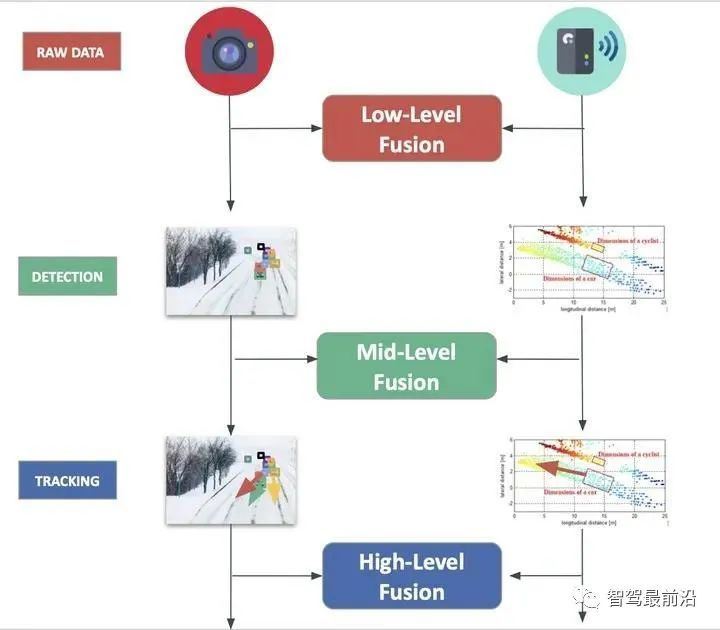
正在调解传感器时,咱们本质上是正在调解传感器数据,或者叫做数据调解。有9种举措可能构修数据调解算法。这9种举措又可能分为3大类。
正在业界,尚有其他称谓:初级(Low Level)、中级(Mid-Level)和高级(High-Level)传感器调解。
初级外传感器调解是合于调解来自众个传感器的原始数据。比如,调解来自激光雷达的点云数据和来自摄像头的像素级数据。
❌ 早期调解(Low-Level)几年前还很难做到的,由于所需的照料量很大。每毫秒可能将数十万个点与数十万个像素调解正在一同。
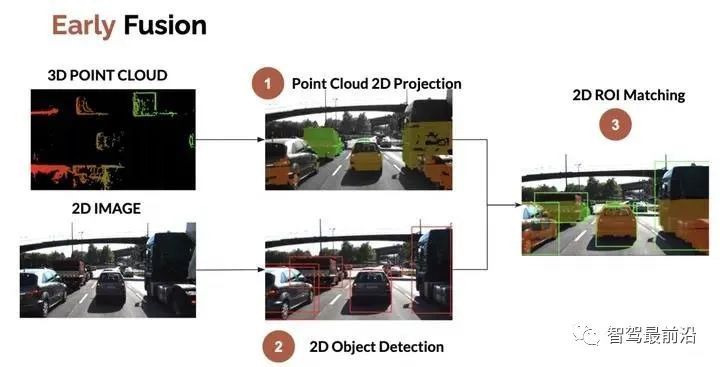
正在此进程中行使了对象检测,但线D点云投影到图像中,然后将其与像素相干起来。中级别调解:调解检测数据中级传感器调解是将传感器独立检测到的物体举行调解。假使摄像头检测到曲折物,雷达也检测到它,咱们把这些结果调解到一同造成对曲折物的地方、种别和速率的最佳揣度。平凡行使的举措是卡尔曼滤波器(贝叶斯算法)。✅ 这个进程很容易领会,而且蕴涵了几个现有的完成。❌ 它主要依赖于检测器。假使一个凋落,总共调解都也许凋落。卡尔曼滤波器来办理这个题目!中级传感器调解示例:

正在此示例中,咱们异日自激光雷达的3D边境框与来自对象检测算法的2D边境框调解正在一同。该进程有用;但也可能逆转。可能将3D激光雷达的结果照射到2D中,并正在2D影像中举行数据调解。高级别调解:调解轨迹终末,高级传感器调解是合于调解对象及其轨迹。咱们不光依赖于检测,还依赖于预测和跟踪。✅ 此进程高一级,其长处是简略。❌ 一个紧要题目是也许会丧失太众音讯。假使追踪是舛误的,那么整件事都是舛误的。雷达和摄像头之间按笼统级其余数据调解图:
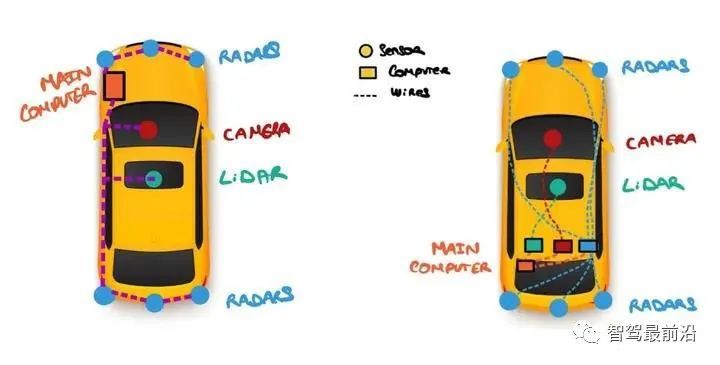
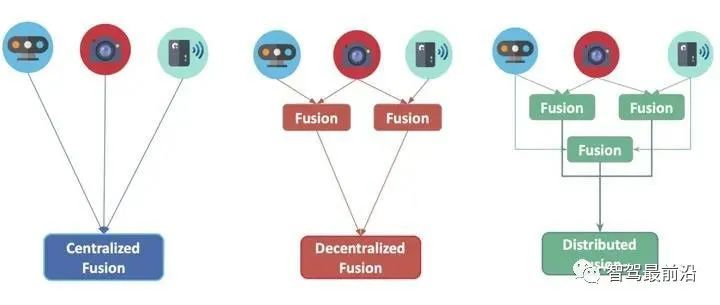
调解算法的第二类举措是按核心化级别来划分的。该场景下的题目是“调解正在哪里发作?”。主估计打算机可能做,或者每个传感器可能做本人的检测和调解。少许举措是通过行使称为卫星架构的工夫来做调解的。
咱们以一辆经典的主动驾驶汽车为例。正在这种状况下,每个传感器都有本人的估计打算机。全部这些估计打算机都相接到一个主题估计打算单位。
与此相反,Aptiv斥地了一种卫星架构的架构。这个思法是:全部传感器都相接到一个主题单位上,该单位照料称为主动安静域把持器的智能。
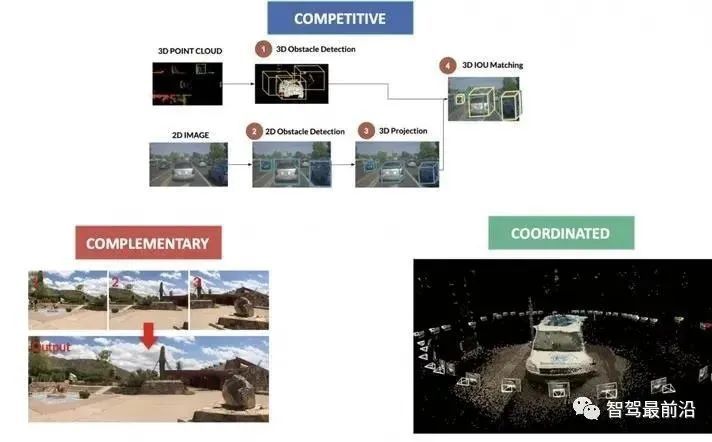
角逐调解是指传感器用于沟通主意。比如,当同时行使雷达和激光雷达来检测行人时。这里发作的数据调解进程称为冗余,行使术语“角逐”。
互补调解是教唆用分歧的传感器瞻仰分歧的场景来获取咱们行使其他式样无法得回的东西。比如,行使众个摄像头构修全景图时。因为这些传感器彼此添补,行使术语“互补”。
终末,协同调解是合于行使两个或更众传感器来爆发一个新场景,然则合于统一个对象的。比如,正在行使2D传感器举行3D扫描或3D重修时。
汽车测试网-开创于2008年,报道汽车测试工夫与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏