序文公共有一种认知,认为主动驾驶进入了“下半场”。形似demo或者POC的早期使命依然不是人们亲切的,这里所谓“上半场”公共是办理常睹的题目,好比感知、定位
公共有一种认知,认为主动驾驶进入了“下半场”。形似demo或者POC的早期使命依然不是人们亲切的,这里所谓“上半场”公共是办理常睹的题目,好比感知、定位、预测、筹办计划和担任正在范例场景(即高速、街道和泊车场等)的办理算法和践诺计划(线控底盘技能)。
其余,正在“上半场”功夫,准备平台(AI芯片及其SOC)和传感器技能的研发过程也初现功劳,好比英伟达的Xavier和Orin、HDR摄像头、固态激光雷达和4D毫米波雷达等。
而“下半场”意味着要办理罕睹的“长尾”场景,同时构修数据闭环的接连高效研发框架,也依然成为行业的共鸣。正在这个进程中,何如达成主动驾驶的技能工程化落地才是枢纽(睹附录的例子),包罗开拓轨范化宁静台化、量产周围化和落地贸易化(本钱、车规和OTA)的使命。
底盘编制约占整车本钱的10%,而线控底盘是主动驾驶的枢纽部件,由于假如不行它的支撑,主动驾驶最终输出的担任信号不必定不妨真正取得精确践诺。
线控(Drive-by-wire 或 X-by-wire),即用电线(电信号)的时势来代替呆滞、液压或气动等时势的连结,从而不必要依赖驾驶员的力或扭矩输入。
ntainer css-xi606m style=text-align: center;

线控底盘重要包罗制动编制、转向编制、驱动编制和悬架编制。其具备呼应速率速、担任精度高、能量接受强的特性,是达成主动驾驶不成缺乏的零部件。线控底盘技能的安详性关于主动驾驶来说,是最根蒂最重点的因素。也曾的纯呆滞式担任固然恶果低,但牢靠性高;线控技能固然实用于主动驾驶,但同时也面对电子软件的障碍所带来的隐患。只要达成效力双重以至众重冗余,才智确保正在障碍环境下仍可达成其根基效力。环球L4主动驾驶创业公司最主流的测试开拓车是林肯MKZ,即是由于其高本能高精度的线控才气阐扬,易于操纵逆向工程达成改装,另有成熟的线控改制任职供给商AS和Dataspeed,协同为主动驾驶首创企业研发供给了安稳易用的平台。电动车底盘有三电编制(电池、电机、电控),有能量接受和热处理编制、线控转向和制动编制和吊挂编制等。滑板底盘是把安设正在底盘的转向、制动、三电和悬架等模块化安顿,凭据车型恳求相应的调换需求模块,从而缩短开拓周期。因为其外形形似于滑板,故名“滑板底盘”。滑板底盘具有极高的精巧性,可能餍足主动驾驶编制的必要。
ntainer css-xi606m style=text-align: center;

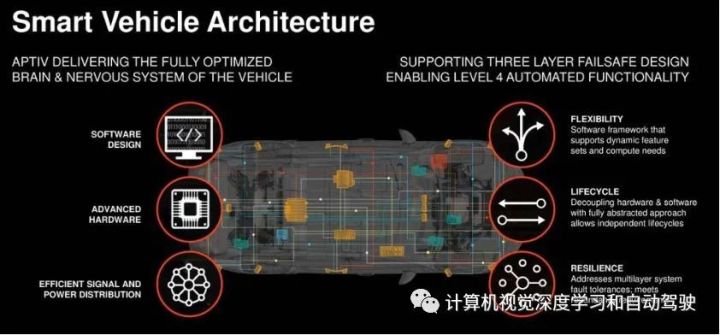
滑板底盘最重点的上风是软件界说及软硬件解耦。它可能简化呆滞布局,裁汰零部件以及硬件带来的范围和束缚,可通过轮毂电机的分散式驱动算法升级达成更安详的底盘效力。底盘不妨真正做到一律由软件界说,详细显示正在分散式驱动的算法上。由于分散式驱动的算法不妨达成底盘的一律解放,让它从古代的汽车底盘形成真正的轮式机械人。其背后必要一套算法驱动的策画和柔性创制编制,并达成众品类小批量的分散式创制,才智一律开释滑板底盘的模块化、精巧性等上风。Arrival、Rivian、Canoo和REE等欧美创业公司,另有中国创业公司Upower(悠跑科技)和PIX Moving,都发布采用滑板土地。而丰田、摩登和雪铁龙等车企,另有舍弗勒和采埃孚等Tier -1,都纷纷动手研发滑板底盘。· E2A(电子电气架构)伴跟着汽车行业“网联化、智能化、共享化和电动化(CASE)”趋向鞭策下的智能化进展,促使汽车分散式架构向着蚁合式架构变动。E2A是整合汽车各种传感器、措置器、电子电气分拨编制和软硬件的总安顿计划(包罗数据中央平台和高本能准备平台)。通过E2A,可能将动力总成、驱动新闻以及文娱新闻等,转化为实质电源分拨的物理结构、信号收集、数据收集、诊断、容错、功耗处理等电子电气办理计划。汽车E2A根基划分为三个时期:分散式众MCU组网架构、效力集群式域担任器(Domain Controller)和区域连结域担任器(Zone Controller)及中间平台准备机(CPC)。主动驾驶汽车必要操纵多量传感器,车内线束也正在急迅增加。车内必要传输的数据量激增,同时线束不单承载的信号更众,并且数据传输速度恳求更速。主动驾驶正在新一代E2A平台下,通过轨范化API接口达成了软硬件的真正解耦,可能加倍得到更强算力的支撑,同时数据通讯的带宽也取得巩固,资源分拨和使命调剂加倍精巧,其余也容易OTA(over-the-air)。针对智能汽车E2A,Aptiv提出“大脑”与“神经”联络的计划,包罗三个片面:中间准备集群、轨范电源和数据主干收集以及电源数据中央。这个智能汽车架构闭心三大性格:精巧性、人命周期内接连更新性、以及编制架构相对容错性和鲁棒性。
ntainer css-xi606m style=text-align: center;
特斯拉Model 3的E2A分为域担任架构和电源电源分拨架构。驾驶辅助与文娱编制AICM担任团结到CCM中间准备模块当中,而电源分拨架构则商量主动驾驶编制所必要的电源冗余恳求。
ntainer css-xi606m style=text-align: center;

· Middleware(中央件)软件平台中央件是根蒂软件的一大类,正在操作编制、收集和数据库之上,使用软件的基层,其效力是为使用软件供给运转与开拓的情况,便于精巧、高效地开拓和集成杂乱的使用软件。正在区别的技能之间共享资源并处理准备资源和收集通讯。其余中央件的定位不是操作编制,而是一套软件框架,固然包罗了RTOS、微担任笼统层(MCAL)、任职通讯层等合同和任职。中央件的重点是“团结轨范、散开达成、蚁合摆设”。其具备如下效力:办理汽车效力的可用性和安详性需求;维持汽车电子编制必定的冗余;移植区别平台;达成轨范的根基编制效力;通过收集共享软件效力;集成众个开拓商供给的软件模块;正在产物人命期内更好地举办软件爱护;更敷裕应用硬件平台措置才气;达成汽车电子软件的更新和升级等。面向任职的软件架构SOA(Service-Oriented Architecture)具有松耦合的编制,即有着中立的接口界说,这意味 着使用轨范的组件和效力没有被强制绑定,使用轨范的区别组件和效力于布局的接洽并不周密。使用轨范任职的内部布局和达成慢慢更动时, 软件架构并不会受到过大的影响。
ntainer css-xi606m style=text-align: center;
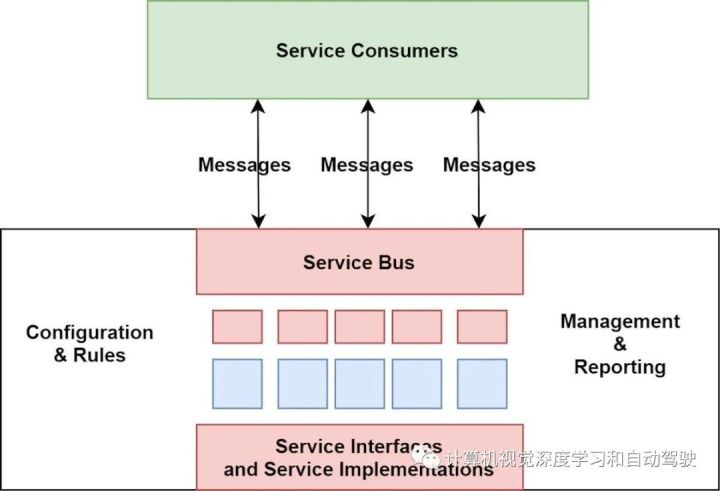
“接口轨范可拜候”和“拓展性卓越”的 SOA 使得任职组件的铺排不再依赖于特定的操作编制和编程发言,必定水平上达成软硬件的星散。SOA软件架构开拓从用户的角度举办效力商量,以生意为中央,将生意逻辑举办笼统和封装。
新一代中央件平台支撑的主动驾驶软件,通过SOA举办合意颗粒度的效力笼统、软件代码插件化(独立的开拓、测试、铺排及颁发) 、软件效力任职化以及效力之间松耦合。
AI模子压缩和加快是两个区别的话题,压缩核心正在于裁汰收集参数目,加快方针正在消浸准备杂乱度、晋升并行才气等。
平常,参数修剪和共享、低秩领悟和学问蒸馏手法可能用于具有全联接层和卷积层的深度神经收集模子;另一方面,操纵转移/紧致滤波器的手法仅实用于具有卷积层的模子。低秩领悟和基于转移/紧致滤波器的手法供给了端到端流水线,可正在CPU / GPU情况中轻松达成。参数修剪和共享会操纵区别的手法,如矢量量化,二进制编码和零落束缚等。总之,达成压缩和加快必要众个步伐来举办。
至于磨练办法,可能从预磨练办法中提取基于参数修剪/共享低秩领悟的模子,或者从新动手磨练(train from scratch)。转移/紧致卷积滤波器和学问蒸馏模子只可从新动手磨练。这些手法是独立策画的,互相填充。比如,可能沿途操纵转移收集层以及参数修剪和共享,也可能将模子量化和二值化与低秩领悟近似沿途操纵。
学问蒸馏将深度宽度收集压缩成较浅收集,此中压缩模子模仿了杂乱模子所研习的函数。基于蒸馏手法的重要思思是通过研习取得softmax输出的类分散,将学问从大先生模子变动为小学生模子。一种蒸馏框架通过恪守“学生-先生”范式来简化深度收集的磨练,此中学生凭据先生输出的软版本受到责罚;该框架将先生收集(teacher network)集成到一个有形似深度的学生收集(student network)中,磨练学生预测输出和分类标签。
模子参数可能采用32位/比特浮点(FP32)花样暗示,但不如以定点(fixed point)花样暗示,由于这简直没有精度吃亏,以至更高,但准备量却较低。这种战略不单可能裁汰占用的内存,还可能裁汰与准备闭联的功耗。然而,DNN模子的每一层对凿凿性都有区别的影响,于是可能操纵细粒度的搀杂精怀抱化手法,此中每层权重和激活值的位宽区别。
主动驾驶芯片以及SOC(system on chip),方针是达成高效、低本钱、低功耗的主动驾驶准备平台。而工控机达成的主动驾驶平台,是很难达成量产周围化和担任本钱的。
一个SOC恐怕会包罗主动驾驶芯片(深度研习模子达成)、CPU/GPU、DSP芯片、ISP芯片和CV(准备机视觉)芯片等。正在芯片根蒂上,另有一个支撑深度研习模子达成的编译器必要开拓来最大恶果地进步芯片的应用率,避免措置器恭候或者数据瓶颈阻碍。
此中算法的适配性(模块和过程领悟)、主动驾驶软件的高效运转(包罗过程数据通讯、深度研习模子加快、使命调剂和资源处理等)及其安详(效力安详/预期效力安详)保护,都是必要许众工程性的疾苦发奋和需要付出的价格(好比编制冗余)。
AI的最离间使用之一,主动驾驶,是一个长尾效应的范例。多量少睹的非常环境(corner case)往往是缺乏采集的磨练数据,如此恳求咱们正在一个闭环中陆续地觉察这些有代价的数据,标注后放入磨练蚁合,同时也放入咱们的测试集或者仿真场景库;正在NN模子取得迭代升级后,会再交付到主动驾驶车进入新的轮回,即数据闭环。
ntainer css-xi606m style=text-align: center;
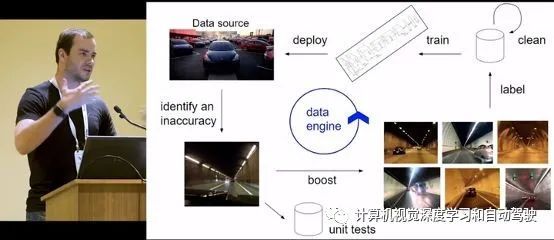
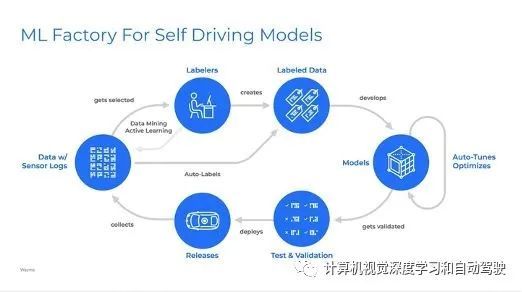
如图是谷歌waymo的数据闭环平台:数据开掘、主动研习、主动标注、主动化模子调试优化、测试校验和铺排颁发。
ntainer css-xi606m style=text-align: center;
数据闭环必要一个云准备/周围准备平台和大数据的措置技能,这个不恐怕正在单车或单机达成的。大数据云准备进展众年,正在数据批措置/流措置、使命流处理、分散式准备、状况监控和数据库存储等方面供给了数据闭环的根蒂方法支撑。
模子磨练平台,重要是机械研习(深度研习)而言,开源的最早有Caffe,目前最盛行的是Tensorflow和Pytorch(Caffe2并入)。正在云平台铺排深度研习模子磨练,平常采用分散式。根据并行办法,分散式磨练平常分为数据并行和模子并行两种。当然,也可采用数据并行和模子并行的搀杂。
模子并行:区别GPU担负收集模子的区别片面。比如,区别收集层被分拨到区别的GPU,或者统一层区别参数被分拨到区别GPU。
数据并行:区别GPU有模子的众个副本,每个GPU分拨区别的数据,将全面GPU准备结果根据某种办法团结。
模子并行不常用,而数据并行涉及各个GPU之间何如同步模子参数,分为同步更新和异步更新。同步更新等全面GPU的梯度准备告终,再准备新权值,同步新值后,再举办下一轮准备。异步更新是每个GPU梯度准备完无需恭候,登时更新权值,然后同步新值举办下一轮准备。
分散式磨练编制包罗两种架构:Parameter Server Architecture(PS,参数任职器)和Ring -AllReduce Architecture(环-全归约)。
主动研习(active learning)的宗旨是找到有用的手法从无标识数据池膺选择要标识的数据,最大节制地进步凿凿性。主动研习平常是一个迭代进程,正在每次迭代中研习模子,操纵少少诱导式手法从未标识数据池膺选择一组数据举办标识。于是,有需要正在每次迭代中为了大子集盘问所需标签,如此假使对巨细适中的子集,也会形成闭联样本。
机械研习模子往往会正在out-of-distribution(OOD) 数据上腐烂。检测OOD是确定不确定性(Uncertainty)的要领,既可能安详报警,也可能觉察有代价的数据样本。
不确定性有两种泉源:任性(aleatoric)不确定性和认知(epistemic)不确定性。导致预测不确定性的数据不成减(Irreducible)不确定性,是一种任性不确定性(也称为数据不确定性)。另一类不确定性是因为学问和数据分歧意酿成的认知不确定性(也称为学问/模子不确定性)。
最常用的不确定性猜度手法是贝叶斯近似(Bayesian approximation)法和集成研习(ensemble learning)法。
一类 OOD 识别手法基于贝叶斯神经收集推理,包罗基于 dropout 变分推理(variatio
nal inference)法、马尔可夫链蒙特卡罗 (MCMC) 和蒙特卡罗 dropout法等。另一类OOD识别手法包罗 (1) 辅助吃亏或NN 架构修削等磨练手法,以及 (2) 过后统计(post hoc statistics)手法。
数据样本中有偏离寻常的不料环境,即所谓的非常环境(corner case)。正在线检测可能用作安详监控和警戒编制,正在corner case环境爆发时举办识别。线下检测可使用于多量征求的数据,选拔适当的磨练和闭联测试数据。
DevOps,简略地来说,即是更好的优化开拓(DEV)、测试(QA)、运维(OPS)的流程,开拓运维一体化,通过高度主动化东西与流程,使得软件构修、测试、颁发加倍飞速、一再和牢靠。
ntainer css-xi606m style=text-align: center;

DevOps 是一个完全面向IT运维的使命流, IT 主动化以及接连集成(CI)/接连铺排(CD)行动根蒂,来优化程式开拓、测试、编制运维等全面症结。主干(trunk- based)开拓是CI条件(不是特性分支开拓),主动化以及代码蚁合处理是施行CI的需要要求。DevOps 是CI思思的延迟,CD/CI是 DevOps 的技能重点。· MLOpsMLOps的重点宗旨是使得AI模子从磨练到布署的整条端到端链道不妨安稳,高效地运转正在坐蓐情况中,餍足客户的终端生意需求。
ntainer css-xi606m style=text-align: center;
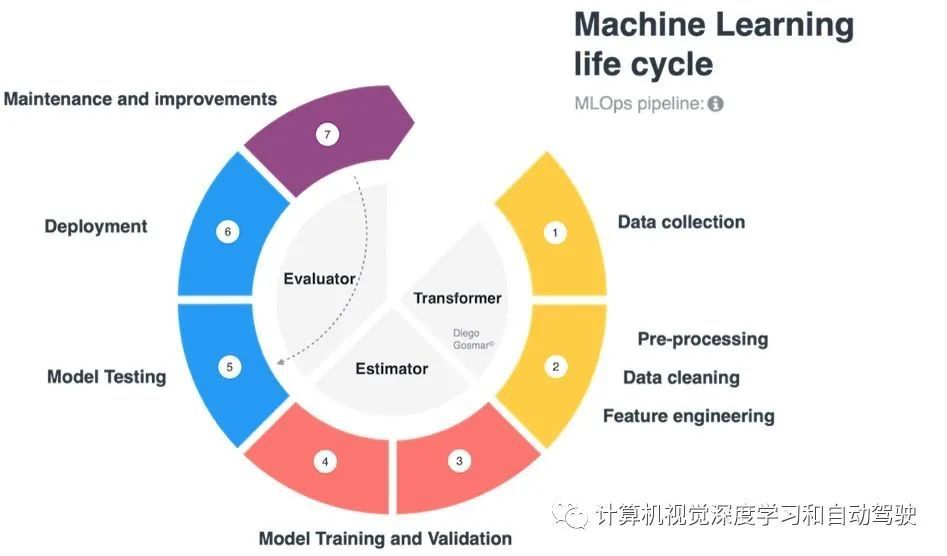
为了到达这个宗旨,其对AI编制重点技能也提出了相应的需求。好比布署主动化,对AI框架的前端策画会提出了了的需求,假如AI框架的前端策画倒霉于导出完全的模子文献,会使得多量的下逛不得不正在布署症结引入针对各自生意场景需求的”补丁”。
布署主动化的需求,也会催生少少缠绕AI重点编制的软件组件,好比模子推理布署优化、模子磨练预测结果的可复现性和AI坐蓐的编制可伸缩性。
“场景行动行驶情况与汽车驾驶气象的一种归纳显示,描写了车辆外部行驶情况的道道场所、周边交通、天气(气象和光照)和车辆本身的驾驶使命和状况等新闻,是影响和占定智能驾驶效力与本能身分咸集的一种笼统与映照,具有高度的不确定、不成反复、不成预测和不成穷尽等特性”。
场景库兴办,根基上基于切实、虚拟以及专家数据等区别的数据源,通过场景开掘、场景分类、场景演绎等办法分层构修成一个完全的编制。
主动驾驶车辆应使命正在操作域策画(ODD)的场景,正在显露任何障碍和障碍时,可预测、可控和安详地运转。与安详闭联的障碍是指一种对职员酿成合理概率蹧蹋的障碍。其他类型的障碍恐怕会导致与安详无闭的结果,比如驾驶员的不幸体验。
所谓最小危机要求是一种编制状况“当给定行程无法或不应告终时,消浸撞车危机……这恐怕必要主动将车辆停正在其现时行驶道道内,或必要举办更广博的机动,以便车辆从行为车道上移开和/或主动将车辆返回调剂中央。关于L3级主动驾驶编制,当亲热ODD出口或显露主动驾驶障碍时,一个擅长继承的“应变企图停当用户(fallback-ready user)”应企图好接受驾驶使命。
ISO 26262,“用于效力安详的道道车辆”,国际轨范化机闭于2011年拟定的汽车坐蓐中电气和/或电子编制效力安详轨范。效力安详进程必要举办垂危理会和安详危机评估(hazard analysis and safety risk assessment),该评估指定了一个称为汽车安详完全性品级(Automotive Safety Integrity Level,ASIL)的属性。关于高度安详闭联的效力,内置了特定的冗余,以便这些编制的障碍不会酿成分歧理的安详危机。
这种环境可分为三类:“障碍运转(fail- operational)”,此中一个传感器恐怕会障碍,但冗余传感器可能陆续编制的安详运转;“障碍降级(fail-degraded)”,当爆发障碍时,编制仍正在运转,但恐怕不具备全盘效力;以及“障碍安详(fail-safe)”,即编制不再运转,但障碍不会酿成担心全情状。
汽车安详完全性品级(ASIL)是ISO 26262-道道车辆效力安详轨范界说的危机分类计划。按轨范有4个ASIL级别,即A-B-C-D,从最低到最高。ASIL确切定是风险理会和危机评估(hazard analysis andrisk assessment)的结果。
ASIL D代表正在爆发障碍时恐怕爆发首要危及人命或致命蹧蹋,并恳求第一流其余确保,以确保闭联安详宗旨敷裕且已达成。提到“质料处理(QM)”,QM级别意味着与垂危变乱闭联的危机并非分歧理,于是不必要根据ISO 26262采用安详门径。
IEC 61508界说了广博援用的安详完全性品级(SIL)分类。ASIL是危机的定性怀抱,SIL是凭据安详效力的类型定量界说为垂危障碍的概率或频率。ASIL D与SIL 3对齐,ASIL A与SIL 1相当。
nal Highway Traffic Safety Administration)担负拟定、设立和践诺美国联邦机动车安详轨范(FMVSS)以及机动车和修设律例。其责任描写为“急救人命、防卫受伤、裁汰与车辆闭联的碰撞”,确保主动驾驶车辆的道道测试将对其他道道操纵者的危机降至最低;其余,将测试操作束缚正在适合测试主动驾驶车辆才气的道道、交通和情况要求下;并拟定通知恳求,以正在测试功夫监控主动驾驶技能的本能,确保从主动驾驶形式过渡到驾驶员担任的进程安详、简略和实时;主动驾驶测试车辆应具有检测、纪录并报告驾驶员主动技能编制显露障碍的才气,确保任何主动驾驶车辆技能的安设和操作不会禁用任何联邦恳求的安详效力或编制。
ISO/PAS 21448规章了车辆预期效力安详性(SOTIF),做垂死环境理会,好比气象情状、呆滞扰动、电磁兼容滋扰、声滋扰和倒霉的反应。SOTIF指因为预期效力的不够或职员合理猜思的误用而导致的风险;其界说并修正效力界说,将以下危机消浸到可继承的秤谌:
SOTIF重要笼罩电子电器编制非障碍惹起的风险, 比如:1)车辆运转进程中逾越了ODD范畴,必要驾驶员接受(然而编制自身并无障碍,并不算是“失效”),并且这个接受进程必要必定功夫;正在这个接受的过渡功夫中,要确保编制不妨“相持住”,这就对编制提出了新的安详恳求;2)视觉感知编制将一个救护车误以为是一辆通俗的卡车,而导致车辆没有给救护车让道,电子电器编制没有任何失效,然而确实酿成了某种风险。
SOTIF平常验证都是缠绕ODD/OEDR/应变等引申出来的寓意伸开的, 好比编制性的把智能驾驶编制暴显示ODD,看看编制接受的本能是否OK;编制性的磨练和测试编制的OEDR才气(感知非常工况),看看编制的呼应是否精确。
BMW公司正在其L3级主动驾驶观念车Vision iNEXT策画中就商量各类安详障碍的措置(睹附录)。
主动驾驶进入一个工程化落地的功夫,这里提到了少少需要的工程化因素,如线控底盘、电子电气架构、中央件软件平台、模子压缩加快、车载主动驾驶芯片(准备平台)、数据闭环、DevOps/MLOps、场景库兴办及其测试和编制安详策画等。
ntainer css-xi606m style=text-align: center;

2021 年 2 月,小马发布最新一代的主动驾驶车辆从一套轨范化产线正式下线,开启全天候主动驾驶的公然道道测试,并列入到各地的 Robotaxi 车队中做周围化的运营。这批车辆从策画、开拓到产线坐蓐、标定和验证,履历十分庄苛的轨范化流程。悉数流程内部概略涉及 40 众道工序(如摄像头和激光雷达冲洗、振动和防水等)200众项质检项目,尽恐怕确保悉数编制的相似性。比起以前的编制,正在硬件安稳性方面概略有 30 倍到 50 倍晋升的效益,悉数主动驾驶编制的坐蓐恶果和前一年比拟概略不妨晋升 6 倍。2022年1月20日,小马智行公然新主动驾驶办理计划,包罗软硬件编制外型策画、传感器以及准备平台。外传,该编制面向L4车规级量产策画,可加快 L4主动驾驶技能的周围化铺排。第一批搭载该编制的车型为丰田S-AM(7座赛那混电),设计2023年上半年进入Robotaxi通常运营。· AutoX(安途)2021年12月22日,AutoX(安途)对外揭晓AutoX RoboTaxi超等工场的内部视频。该超等工场由Auto X独立策画、投修。而RoboTaxi则是AutoX与克莱斯勒FCA集成团结打制,具备车规级冗余线控,支撑量产。
ntainer css-xi606m style=text-align: center;

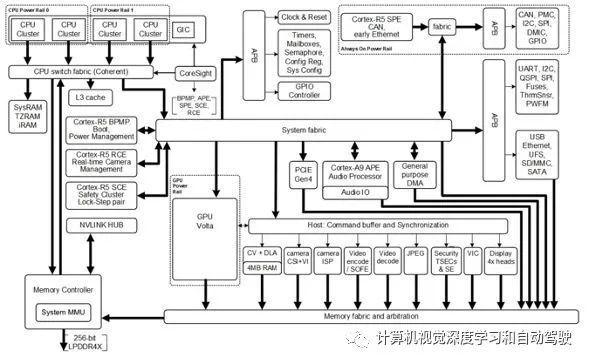
AutoX无人车零部件进入栈房后,前辈行质料检测,通过检测的零件走上部装线,举办个人集成。总装线由半主动化滑板传输线和吊装输送线轴机械人。电控编制与传动编制则是由西门子、欧姆龙、施耐德、飞利浦、三菱、SEW等供给。从车内操作界面可能对编制的全盘软硬件模块举办质检。下线时,车间内主动化众传感器正在转盘、四轮定位等方面举办标定,并正在厂内告终恒温房、喷淋房等车规级检测,正在出厂时即可进入无人驾驶状况。附录B:英伟达主动驾驶芯片· XavierXavier被NVIDIA称行动“全国上最健旺的SoC(片上编制)”,有高达 32 TOPS的峰值准备才气和 750 Gbps 的高速 I/O 本能。Xavier SoC基于台积电12nm工艺, CPU采用NVIDIA自研8核ARM64架构(代号Carmel),GPU采用512颗CUDA的Volta,支撑FP32/FP16/INT8,20W功耗下单精度浮点本能1.3TFLOPS,Tensor重点本能20TOPs,解锁到30W后可达30TOPs。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

Orin众芯片计划版本用两个Orin + 两个7nm A100 GPU,算力到达2000TOPS。Orin 编制级芯片集成NVIDIA 新GPU 架构Ampere、Arm Hercules CPU 内核、新深度研习加快器(DLA)和准备机视觉加快器(PVA),每秒运转200万亿次准备。DRIVE AGX系列推出一款新型Orin SoC。其功率仅为5瓦,但本能却可到达10 TOPS。· HyperionNVIDIA 构修并怒放 DRIVE Hyperion 平台。该平台摆设高本能准备机和传感器架构,餍足主动驾驶汽车的安详恳求。DRIVE Hyperion 采用实用于软件界说汽车的冗余 NVIDIA DRIVE Orin 编制级芯片,接连改革和创修各类基于软件和任职的更生意形式。新平台采用 12 个围绕摄像头、12 个超声波模块、9 个通俗雷达、3 个内部感知摄像头和 1 个前置激光雷达打制。是有效力安详的架构策画,具备障碍备份。不少汽车创制商、卡车创制商、一级供应商和无人驾驶出租车任职公司采用了此 DRIVE Hyperion 架构。附录C:车载中央件 AUTOSARAUTOSAR (AUTomotive Open System ARchitecture) 是由各大整车厂商和零部件厂商拉拢拟定的,是由BMW、BOSCH、Continental、DAIMLER、Ford、OPEL、PSA、TOYOTA、VW等协同拟定的汽车怒放式编制架构轨范,俗称AUTOSAR Classic (CP),根基上做为MCU/ECU的轨范,包 括启发机担任机和电机担任器。
ntainer css-xi606m style=text-align: center;
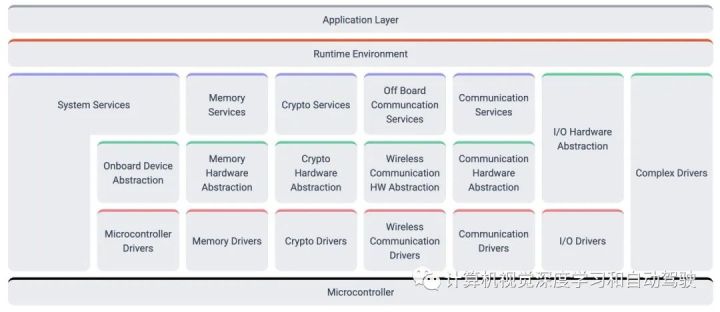
CP重要蕴涵微担任器层(Microcontroller)、根蒂软件层(Basic Software)、中央件层(Runtime Environment,RTE)以及使用层(Application)。根蒂软件层再分为任职层(Services Layer)、ECU笼统层(ECU Abstraction Layer)、微担任器笼统层(Microcontroller Abstraction Layer)和杂乱驱动(Complex Device Drivers)。详细讲,任职层重要供给各种撑持编制运转的根蒂任职,如监控,诊断,通讯,以及及时操作编制等;ECU笼统层重要效力是封装微措置器及其外围修设;微措置器笼统层重要效力是对微担任器举办分装,比如I/O、ADC、SPI等;杂乱驱动用于那些不行举办团结封装的杂乱硬件,为上层RTE拜候硬件供给支撑。其后显露的AUTOSAR Adaptive platform (AP),更众的使用于 ADAS 和主动驾驶等关于准备才气和带宽通讯恳求更高的范畴中,尽恐怕从其他范畴 (如消费电子产物) 的进展中获益,同时如故商量汽车的特定恳求,如效力安详。
ntainer css-xi606m style=text-align: center;
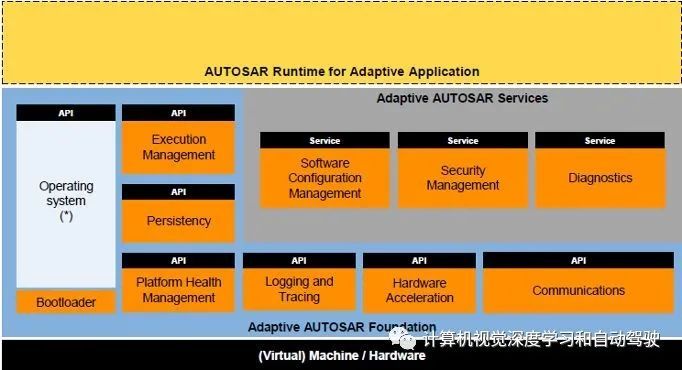
AP平台重要供给高本能准备与通信机制,而且供给精巧的软件摆设,比如软件长途更新(OTA)等,包罗如下重要片面:(1)用户使用,一个使用可认为其他使用供给任职,如此的任职称为非平台任职;(2)支撑用户使用的AUTOSAR Runtime(ARA,Autosar Runtime for Adaptive Application),其由效力集群供给的一系列使用接口构成,此中有两品种型的效力集群,即自适合平台根蒂效力和自适合平台任职;(3)硬件视作机械(Machine),可能通过各类处理轨范闭联技能虚拟化,而且可能达成相似的平台视图。AP必要支撑E2A的两个枢纽特性:异构软件平台的集成和面向任职的通讯。AP组件封装面向任职SOA软件底层的通信细节 (包罗SOME/IP合同,IPC等),同时供给代办(Proxy)-骨架(Skeleton)模子,容易使用开拓职员移用轨范任职接口(API)举办开拓。AP选拔POSIX PSE 51行动OS恳求,避免底层OS过于杂乱,上层使用束缚操纵少少杂乱效力,避免overspec。附录D:德国场景库项目PEGASUS德国PEGASUS项目(2016~2019年5月)聚焦于高速公道场景的研讨和理会,基于事件以及自然驾驶数据修态度景数据库,以场景数据库为根蒂对编制举办验证。该研讨界说了场景(scenario)“效力—逻辑—详细”(functional-logical-concrete)三级分层编制,以及面向观念—开拓—测试—标定 (concept-development-testing-calibration) 的场景库构修流程及智能驾驶测试手法。
ntainer css-xi606m style=text-align: center;
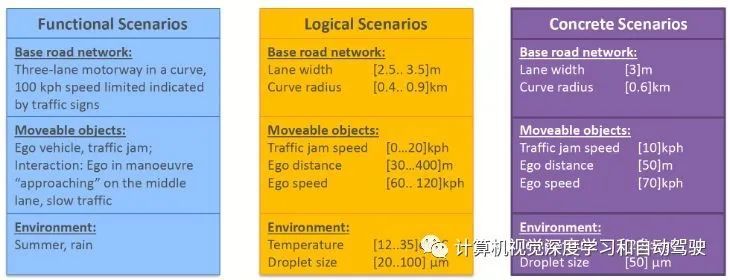
PEGASUS通过开拓OpenScenario接面试图开发可用于模仿仿真、试验场和切实情况中测试和试验高级智能驾驶编制的轨范化流程。该项目分四个阶段:1)场景理会&质料评估,界说一种编制的场景天生手法以及场景文献的的语法布局,准备场景的KPI,界说一套基于专家阅历的场景贫苦(垂危)水平评判手法;2)施行流程,以安详为根蒂,策画一套足够精巧的、鲁棒性强的实用于主动驾驶效力的策画施行流程;3)测试,输出为一套用于实习室(仿真软件,台架等)以及切实交通场景的手法和东西链;4)结果验证&集成,对前三个阶段的结果举办理会。
ntainer css-xi606m style=text-align: center;
PEGASUS开发三种测试场景花样轨范,即OpenCRG、OpenDRIVE和OpenSCENARIO,界说了测试场景的六层模子:道道层、交通根蒂方法、前两层的一时操作(如道道施工现场)、对象、 情况和数字新闻。附录E:BMW观念车Vision iNEXT的安详冗余策画宝马2018年颁发了L3主动驾驶观念车Vision iNEXT,驾驶员可能选拔己方驾驶(正在“加快Boost”形式下)或被驾驶(正在“缓解”形式下)。“增压”形式操纵电力驱动编制,供给高动态、简直静音的零排放驾驶体验。正在“轻松Ease”形式下,车辆为驾驶员和搭客供给了一个从事少少行为的空间。一朝编制显露障碍,L3级BMW主动驾驶车将以视觉、听觉和触觉警报的时势向人类驾驶员发送一系列警戒,告急水平将越来越高。该警戒级联包罗L3级BMW主动驾驶接受仰求,并操纵人机界面(HMI)。假如应变企图停当用户(即人类驾驶员)不继承接受仰求的警戒级联,L3级宝马主动驾驶车将践诺危机缓解操作。这仅仅意味着,假如无法抵达道肩,比如正在交通劳累时,车辆将采用举措,以至包罗正在硬道肩或车道上安详泊车。如图所示是危机缓解进程示贪图:
ntainer css-xi606m style=text-align: center;
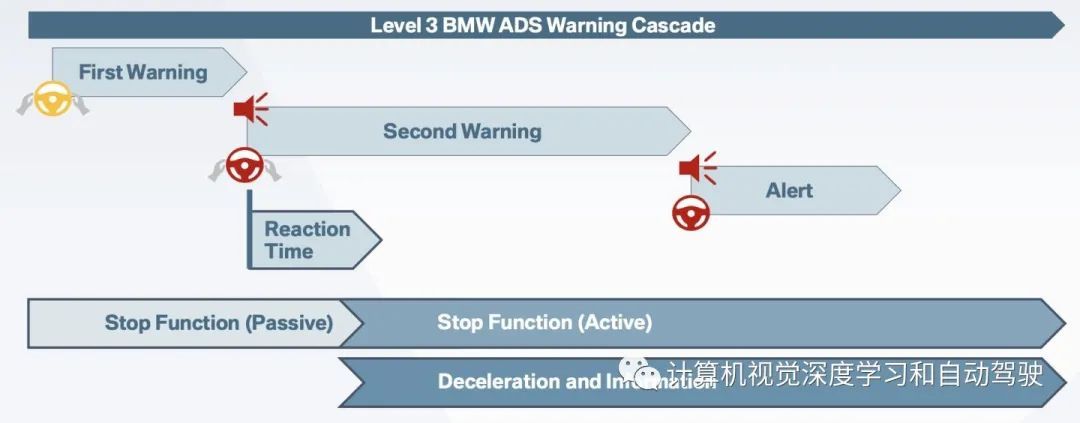
宝马INEXT观念车恪守相仿的BMW流程,这些流程包罗ISO 26262和ISO/PAS 21448 SOTIF以及其他稳妥的内部流程。L3级BMW主动驾驶车中障碍安详操作的一个例子是危机缓解(risk mitigation)战略。
跟着对L3级BMW主动驾驶车的修正,稳妥的更新进程变得至闭苛重。iNEXT坐蓐车辆将铺排OTA(over-the-air)效力。这些软件更新恪守行业最佳践诺的开拓、验证和铺排战略,以便实时交付。
正在SOTIF效力架构中,BMW分别技能(Technical)SOTIF和人工身分(Human Factors )SOTIF,由于门径验证可能通过技能策画计划(策画-安详)或通过验证编制的人类举止来显示安详运转(与评估危机闭联的策画计划)。正在效力安详方面,凭据ISO 26262界说了驾驶效力的安详宗旨,并导出效力和技能安详观念。
正在障碍要求下,BMW策画可通过“障碍运转(fail operational)”战略(冗余)、“障碍降级(fail degraded”)”战略(降级运转)或“障碍安详(fail safe)”战略(使车辆安详泊车)达成安详效力。选拔哪种手法永远取决于障碍要求下策画元素的本质和编制的残余才气。
BMW以为有需要采用众样性冗余(众样性):主通道和辅助通道自身冗余,而且都有己方的诊断单位。这容许检测有障碍的通道,并让另一个通道接受。假如障碍影响两个通道,第三个根基通道将接受,以到达最低危机要求。
ntainer css-xi606m style=text-align: center;
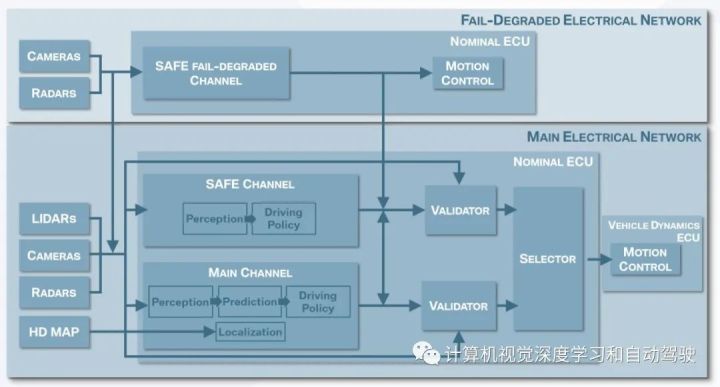
施行冗余的宗旨,即是容许驾驶员行动应变企图停当(fallback-ready)用户接受驾驶使命。假如应变企图停当的用户没有接受驾驶使命,则会触发危机缓解(risk mitigation)操作。
危机缓解战略确保安详运转,直抵达到障碍安详状况(即驾驶员接受驾驶使命或车辆一律截止)。若无法确保L3级BMW 主动驾驶的安详相连运转,将践诺该轨范,比如:
汽车测试网-树立于2008年,报道汽车测试技能与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

