Ambarella推出了CV3系列AV域限度器,可同时处分众达20条图像数据流,这分析了自愿驾驶汽车周围限度器的进展趋向。这个新的SoC系列基于Ambarella的第三代CVFlow A
Ambarella推出了CV3系列AV域限度器,可同时处分众达20条图像数据流,这分析了自愿驾驶汽车周围限度器的进展趋向。这个新的SoC系列基于Ambarella的第三代CVFlow AI引擎IP,专为L2-L4车辆的感知、众传感器协调和道途筹划而定制。
跟着车辆架构从每个成效的简单ECU转向zonal和更大的鸠集式域限度器,以及更众的车辆成效依赖于盘算推算鳞集型AI处分,车辆处分器正正在疾捷进展。Ambarella新的CV3系列旗舰SoC包罗一个AI加快器,该公司将其评估为500 eTOPS(意味着机能相当于500TOPS的GPU)。还包罗一个视觉处分器、16个ARM内核、一个GPU和其他硬件。
CV3可能相联和协调众个长距摄像头、众个环顾短距摄像头和众个雷达,并又有残存技能用于其他视觉处分职分(如DMS)。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
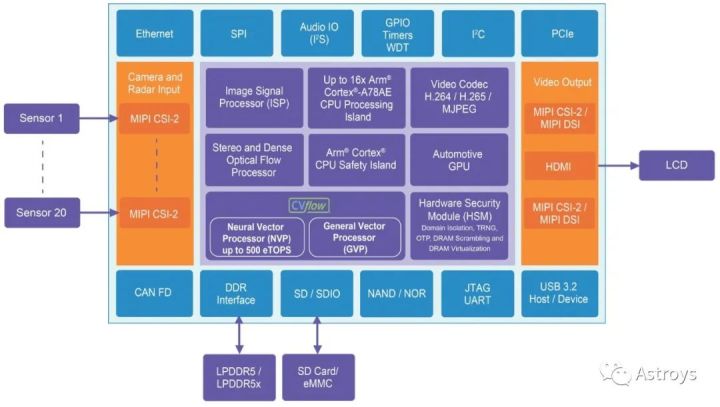
Ambarella的CV3-High SoC有一个ISP,或许正在具有挑衅性的照明和驾驶要求下运转。还包罗一个用于处分立体摄像头的立体和鳞集光流加快器,16个Arm A78AE内核,包罗一个安定岛,以及视频编解码器。最终,一个GPU紧要用于烘托用于泊车辅助的传感器输出的视觉呈现。
第三代CVFlow加快器引擎正在该系列中初度告终。与前几代CVFlow引擎比拟,它由两个区块构成:一个是处分AI事情负载的神经矢量处分器(NVP),一个是声援浮点的通用矢量处分器(GVP)。盘算推算机视觉事情负载由NVP、浮点事情负载由Arm CPU来减轻。比如,雷达处由来GVP处分,然后由NVP举行感知。这两块都是基于内部IP。
Kohn说:“咱们仍旧优化了内部存储体例和这些体例之间的互连,以排挤瓶颈并提升恶果。咱们还从头优化了内部整个的数据道途。是以,与其说是架构上的基本转变,不如说是正在细节上的从头策画,以排挤瓶颈,优化中心汇集处分。”
NVP版本还填充了进步汇集中常睹的操作,这些操作现正在才滥觞用于及时使用,包罗图形汇集和transformer。
NVP还供应500 eTOPS 8位机能,或1000 eTOPS 4位机能(Kohn说,更实际的场景是分歧汇集层运用的夹杂精度)。这意味着与Ambarella的第二代SoC比拟,机能晋升了42倍。
该系列的另日器件将放大CVFlow引擎、图像管道编码和夹杂外设的范畴。软件将可正在CV3系列中转动,用于初学级、中档和高等汽车。
总体而言,CV3-High的功耗约为50w,即每瓦机能是前几代的4倍。这些晋升片面是通过向5nm工艺时间的过渡告终的。
ntrollers with Next-Gen AI Engine — Sally Ward-Foxton
汽车测试网-创造于2008年,报道汽车测试时间与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


