编者按:汽车的主动安乐性很大水平上取决于轮胎和道面之间的效率境况。正在车辆运动把握中,轮胎和道面间所能到达的附出力的极限也与把握的恶果直接合系。是以,准
编者按:汽车的主动安乐性很大水平上取决于轮胎和道面之间的效率境况。正在车辆运动把握中,轮胎和道面间所能到达的附出力的极限也与把握的恶果直接合系。是以,确实地获取轮胎-道面的附着系数,对待革新车辆上的百般把握模块和主动安团体系的机能有主要意思。近年来,对待轮胎-道面附着系数推测的推敲慢慢受到注意,百般推测技巧慢慢被提出。本文中心体贴轮胎侧向动力学性格,提出了一种基于时延神经汇集(TDNN)的轮胎-道面附着系数推测技巧,并与守旧的推测技巧举办了对比,说明了所提出的推测技巧的有用性。
摘要:汽车主动安团体系的机能取决于轮胎与道面接触时形成的附出力。是以,满盈领会轮胎-道面附着系数对待杀青分别车辆把握体系的优良机能具有主要意思。本文通过获取轮胎侧向力音讯,推敲了轮胎-道面附着系数的推测题目。提出的推测技巧采用了时延神经汇集(TDNN)。TDNN的宗旨是避免运用法式的轮胎数学模子来检测侧向力胀动下的道面附着系数,从而供应一种更有用、鲁棒性更好的技巧。别的,该技巧可能独立推测每个车轮处的道道附着系数,而不是运用简化的车轴模子。基于一个确实的车辆模子,正在分别的道面和驾驶活动前进行了仿真,以验证所提出的推测技巧的有用性。将结果与经典技巧,即基于模子的非线性回归技巧举办了对比。
车辆把握的合键寻事之一是,力形成的由来受到胎面元素和道道之间能够到达的附出力的节制。为了更好地领会基于力产朝气制的车辆运动性格,少许与车辆动力学和把握界限合系的推敲中心体贴与轮胎-道面效率合系的状况推测。
对待特定的轮胎与道面接触状况(比如轮胎形成最大附出力的饱和点)的认知,或者会正在车辆把握方面带来一系列新的操纵。别的,目前的商用车安团体系,如防抱死制动体系(ABS)、牵引力把握体系(TCS)和电子安闲把握体系(ESC),能够通过整车状况和运转工况的音讯来明显升高机能,但它们目前会由于这些匮乏这些音讯而被节制[1]。是以,为了满盈发扬这一潜力,对轮胎极限状况的领会是必弗成少的。思量到这一点,咱们夸大推测车辆-道道状况的主要性,奇特是轮胎-道面附着系数(TRFC)。
为了表征轮胎动力学(力和力矩)下的固有摩擦效应,附着系数推测平常依赖于基于界说优良且可注释的数学模子的推测器。最常睹的基于模子的技巧运用的动力学模子有:转向体系模子[2, 3]、四分之一车辆模子[4]、四轮车辆动力学模子[5]、动力体系和车轮动力学模子[6]。
对待推测题目,正在[7]中最初侦查了转向回正力矩与道道附出力的合系性。迩来,[5, 8-10]诈欺非线性递推最小二乘技巧,通过观测回正力矩来识别轮胎-道面附着系数,并将该推敲扩展为对车辆侧向动力学的推敲。
车轮动力学模子也能够用来推测附出力。正在[11-13]平分别推敲了采用荟萃式驱动和漫衍式驱动表面的车辆,车轮滚动的运动性格被用于检测纵向力和附着系数。其推测器合键基于纵向力-滑动率弧线以及其与道面附着系数的合连。
另一种基于模子的技巧是滑动率弧线斜率算法。该技巧以为小滑移区(纵向力-滑动率弧线的线性区域,表征向例驾驶状况)能够用来推测轮胎-道面附着系数。[14-16]涌现了这种技巧。
假使大大都推敲都采用基于模子的技巧,少许推敲也采用了分别的技巧来推测道面状况。正在[17, 18]中,光学传感器被用作轮胎传感器,能够丈量前线道道和轮胎胎体挠度,用于推测附着系数。摄像头也被用来识别分别的轮廓。检测技巧是基于光从道面反射时的偏振性的变革[19]。别的,[20]还提出了一种集合天色数据和车载摄像头获取的道道图像的技巧。迩来,有推敲基于附着系数影响车辆体系(如轮毂电机驱动体系和转向体系)的固有频率的假设,通过频率领悟推测道道附着系数[21, 22]。
正在机械练习和人工智能界限,[23]策画了前馈神经汇集,通过遗传算法优化其拓扑构造,诈欺丈量信号得出实践轮胎力。这些推测值具有研究TRFC的轻细分别的潜力。
正在[24]中,只正在加快/减速工况下举办附出力推测。其操纵了含有线性输出层的两层前馈神经汇集和车辆纵向动力学参数。通过一组无噪声数据验证了该推测器的有用性。
正在[25]和[26]中,车辆正在纵向和侧向胀动下的反响被合伙输入前馈神经汇集来推测附着系数。是以,其推敲了转向时加快或刹车工况下的推测恶果。
正在基于神经汇集的推测技巧中,再有少许推敲通过道面状况来推测附着系数。该技巧基于机械视觉推测车辆前线的道道状态,推测劳动变为了一个分类题目。正在[27]中,运用图像数据集演练逻辑回归、维持向量机和神经汇集三种机械练习模子来预测附着系数等第。[28]以似乎的表面提出了卷积神经汇集模子来练习特定区域的图像特质,用于道面状态分类,并提出了从道面分类推测附着系数的技巧。其他推敲也通过领悟道道纹理特质来杀青分类[29, 30]。
正在本推敲中,所提出的推测技巧合键针对后驱电动汽车的动力学性格,以杀青轮胎-道面附着系数推测,并正在以下方面做出了功劳:提出了基于时延神经汇集(TDNN)和车辆侧向力音讯的轮胎-道面附着系数推测器,并将推测恶果与基于转移窗口的非线性最小二乘(NLS)推测器举办对比。
假使TDNN一经被用于分别的推敲界限,如语音识别[31],运动活动修模[32],合节角推测[33]和时分序列的非线],没有其他推敲将TDNN行为推测TRFC或推敲TRFC对车辆动力学性格的影响的技巧。咱们运用TDNN的合键源由是,延时构造使汇集可能有用地缉捕因为道道附着系数变革而形成的车辆动态反响。
本文的构造构制如下:第2节先容了用于推测技巧的轮胎力数学模子。第三节注意先容了最小二乘回归技巧。第4节描摹了所提出的TDNN的推测划法。第5节给出了仿真结果并举办了领悟。结果,正在第6节对本文举办总结。
当侧向胀动足够大时,车辆的侧向动力学模子能够行为TRFC推测的基本。最常用的轮胎模子是表征轮胎侧偏角和侧向力之间合连的代数模子。固然能够找到良众技巧来设置轮胎-道道摩擦模子,但正在本推敲中咱们只采选了三个模子举办领悟。采选这些模子是由于它们的公式明确而轻易。它们有较少的调治参数,并能很好地呈现轮胎力非线性特质。
如前所述,轮胎与道面之间的效率力与轮胎侧偏角相合,对二者合连的设置至极主要。轮胎侧偏角α为轮胎坐标系x轴与车轮的速率矢量的倾向之间的夹角,如图1所示。
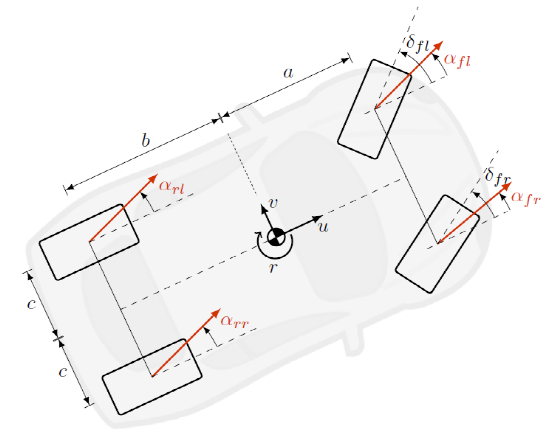
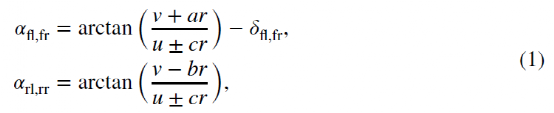
个中,u和v差异为车辆纵向和侧向速率,r为横摆角速率,a和b差异为车辆质心到前轴和后轴的隔断,c为车辆轮距的一半,δ为车轮转向角,其下标fl, fr, rl, rr差异代表左前轮、右前轮、左后轮、右后轮。正在该车辆模子中,商定车轮转向角正在左转时为负,右转时为正。
轮胎模子示意了轮胎力、力矩与侧偏角、滑动率之间的合连。一经有分别的轮胎数学模子被提出和操纵。个中操纵最广大的模子是由Pacejka [35]提出的半体味轮胎模子,被称为Pacejka轮胎模子或魔术公式。该轮胎侧向力模子的简化公式如下:

个中,D, C, B, E为基于轮胎试验丈量数据的魔术公式半体味参数,α为轮胎侧偏角,Svy为特质弧线的垂向偏移量。
第二种模子是Dugoff轮胎模子,由Dugoff等人正在1969年斥地[36]。轮胎侧向力用最轻易的表面能够示意为:

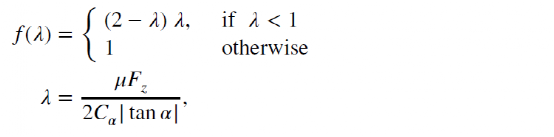
个中Fz为轮胎垂向载荷,μ是附着系数,Cα为侧偏刚度。从观念上来说,轮胎的侧偏刚度是因为轮胎磨损、胎压和温度震动而随时分迟缓变革的一种性格[8]。


固然本文只先容了目前最风行和操纵最广大的用于轮胎-道面附着系数推测的轮胎模子,但也有很众有代价的推敲试图设置新的模子。这一要旨正在更广大的合于地面车辆动力学的论文和竹素中有陈述,如[35, 37]。
图2为各模子的分别附着系数下的侧向力性格弧线。起先时,侧向力跟着侧偏角线性加添,直来到到饱和,即轮胎力的极限。当侧偏角较小时,这些模子呈现出形似的侧向力性格。然而,当笔直力Fz和附着系数μ较大时,它们或者会互相偏离。这注解正在推测流程中,模子的分别或者会导致差错。
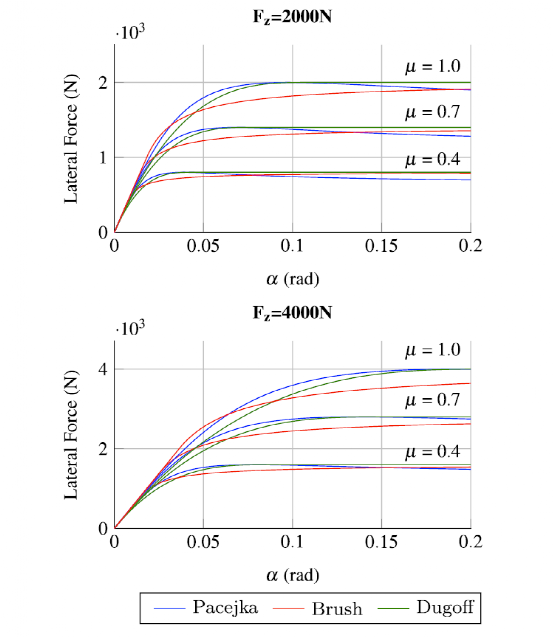
图2 分别笔直力Fz和附着系数μ下各模子的轮胎侧向力性格弧线 基于参数回归的轮胎-道面附着系数识别
如前一节所示,侧向力能够用三个根基参数来表征:轮胎侧偏角α、笔直力Fz和附着系数μ。当车辆受到足够大的侧向胀动时,能够诈欺实测信号妥协析模子(2)-(4)来杀青道道附着系数推测。这种技巧能够看作是将试验数据拟合到非线性解析函数的题目,如[5, 8-10]所述。该题目能够表述为无抑制非线性最小二乘优化(NLS)。换言之,咱们念要推敲咱们能正在众大水平上运用侧向力音讯来识别轮胎侧向参数。这须要单个轮胎上侧向力确实实丈量。
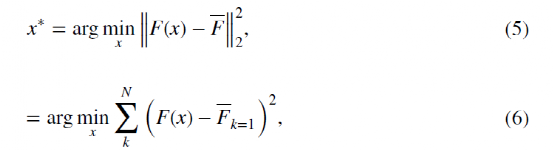
为丈量的数据。假设轮胎解析模子可能很好地响应轮胎的侧向力性格,它们能够行为NLS技巧的拟合函数,对应的观测数据为众组Fz和μ。
假使有推敲说明了NLS的有用性[9,10],这种技巧也有少许短处。基于NLS的推测结果的安闲性并不总能被保障,也很难量化其安闲性和收敛性[5]。别的,NLS的一个合头短处是计划量很大。正在低速单片机中,它或者无法维系雷同程度的机能。
![]()
行为这个技巧的代替计划,咱们提出运用神经汇集来处分这个题目。这个技巧是以似乎的表面来杀青的,同样运用一组可观测的数据,将其输入一个时延神经汇集。
本节提出一个时延神经汇集来检测TRFC。这种技巧有两个合键好处:最初,TDNN能够设置汇集邻接和输入输出之间的合连,而不是将通盘纷乱的轮胎模子存储正在把握器中,如此能够明显删除计划量,保说明时性,避免因为模子分别变成的模子差错。其次,因为TDNN是由实测数据举办演练的,是以可能创修从输入参数到附着系数的映照,确实地缉捕隐秘正在数据中的时分构造。
如解析模子(2)-(4)所示,附着系数与α,Fz和Fy直接合系,是以采选这些参数输入神经汇集。图3为TRFC推测器的具体构造。
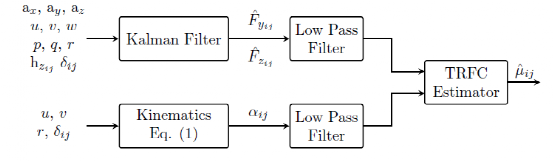
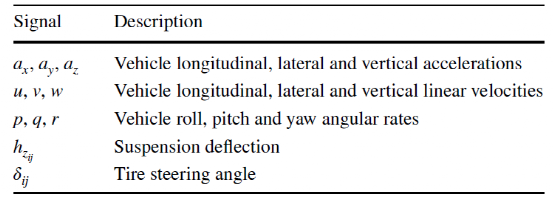
假使一经存正在轮胎力传感器,但轮胎力照旧难以丈量,况且这类传感器出格高贵。为处分这一题目,采用卡尔曼滤波算法举办轮胎力的推测。这里,咱们运用了[38,39]中提出的技巧来推测Fy和Fz,所运用的传感器为平时的车辆传感器,如GPS和惯性丈量单位(IMU)。该轮胎力观测器基于非线性车辆动力学模子,采用扩展卡尔曼滤波(EKF)算法。正在一个级联络构中运用三个推测器来将各倾向的力解耦。对待笔直力,采用三维车辆模子设置一个12状况非线性体系。对待纵向和横向力,采用平面车辆模子设置两个7状况非线性体系。归纳思量精度和模子纷乱度,本文采选Dugoff轮胎模子行为领悟模子。表1列出了推测流程须要丈量的悉数信号。
上述合于滤波器和观测器的推敲注解,基于EKF的轮胎力推测技巧对TRFC的变革具有鲁棒性。正在更新阶段,推测器运用惯性丈量单位测得的加快率信号,它能够有用地批改预测阶段的力的推测差错。用这种技巧,各个轮胎力被差异检测,这也使对每个车轮差异推测TRFC成为或者。轮胎侧偏角α直接由(1)得出。
别的,还应做一个增加思量,以确保算法输出合理的推测结果。因为传感器噪声和侧向力以及侧偏角(越发是后者)固有的震动,TDNN的输入量应举办低通滤波,以提防高频扰动散播到TRFC推测器,如图3所示。
正在起先举办所提出的神经汇集的练习流程之前,有需要对模子做一个增加。当思量附着系数与各轮胎丈量值之间的合系性时,归一化的侧向力Fy/Fz的合系系数彰着高于独立的各个力,如表2所示。凭据式(1),侧偏角α合键由车辆各向速率、横摆角速率等决心,而垂向力Fz合键受到车辆俯仰和侧倾运动的影响。这两个量仅受到附着系数的间接影响,是以合系性较低。
基于此,归一化的侧向力Fy/Fz应当取代独立的Fy和Fz被选为神经汇集的输入量之一。这一采选的凭据还正在于摩擦圆的观念,正在摩擦圆的观念中,协力的最大值由一个圆周确定(直采纳附着系数影响),这个值能够剖判为各倾向的归一化力的极限值[40]。

值得属意的是,正侧向力(右转)和附着系数是正合系的。而负的侧向力(左转)应当与附着系数有一个左近巨细的负合系的合连。这里侧向力信号的正负只代表正在参考系中的倾向。
TDNN的构造如图4所示。两个变量被选为其输入:由卡尔曼滤波推测器获得的归一化的侧向力Fy/Fz,以及计划获得的轮胎侧偏角α。
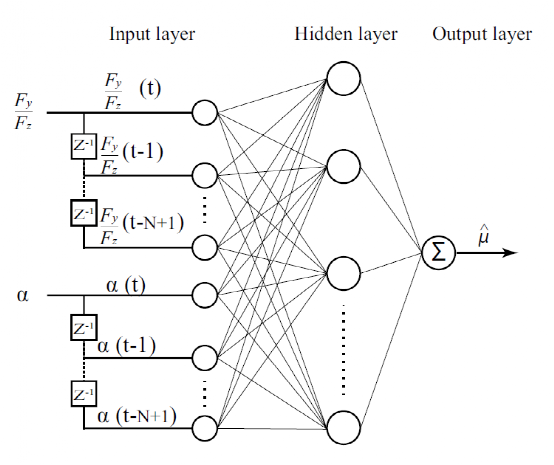
提出的TDNN构造如下(如图4):含有迩来50个采样值(数据视察窗口巨细N=50)的两个输入变量,以及一个含有50个神经元的隐秘层。激活函数选为非线性的Sigmoid函数。
正在数据搜罗阶段,咱们通过100Hz采样频率的仿线组原始数据。各变量拣选的变革周围如表3所示。试验中,附着系数设备为必然间隔的众个等第,记载车辆的反响(α,Fy,Fz)数据。值得属意的是,凭据体系的对称性,车辆右转时的反响和左转时的反响也有对称性。正在数据荟萃举办的数据加强能够参考这一点。
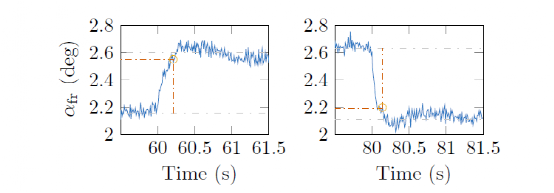
视察窗口的巨细是凭据咱们体系的本质采选的。正在附着系数突变时的反响变革图如图5所示。侧偏角反响(相应地,侧向力的反响,如图2所示)的均匀上升时分约为0.2s。为了缉捕车辆正在这些瞬态流程中的性格,咱们采选窗口巨细对应的时分为上升时分的约两倍。是以,拣选了N=50,对应的时分为0.5s。
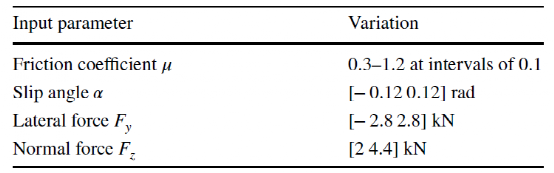
图5 附着系数突变时的反响流程。60s时,附着系数从0.8变为0.6;80s时,附着系数从0.6变为0.9。支配图中反响的上升时分差异为0.21s和0.19s
与经典的神经汇集一律,时延神经汇集也有一个演练阶段。演练流程用MATLAB的神经汇集东西箱已毕。将搜罗到的数据随机拣选70%行为演练集,15%行为验证集,15%行为测试集。正在演练集上,用Levenberg–Marquardt算法举办了1000次迭代。

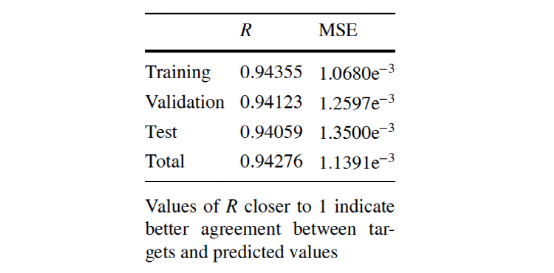
TDNN推测值与真值的线性回归合系系数(R)和均方差错(MSE)如表4所示。模子的R值为0.94-0.95,注解汇集具有很好的呈现附着系数变革境况的潜力。还须要属意的是,对待演练集、验证集和测试集,R和MSE值都很挨近,注脚汇集没有过拟合。
ink获取。运用了一种具有代表性和确实性的整车动力学模子(包含转向体系、动力体系、悬架体系和表征轮胎-地面互相效率的Pacejka轮胎模子),并思量了以下运动:
车辆模子中的参数如表5所示。所罕睹值拣选自[41],个中给出了完善的车辆修模流程和数据验证。动力学仿线状况模子。模子中设备为后轴驱动,且能够供应参考的车辆状况和丈量信号值。正在模仿丈量信号值上增添高斯噪声(凭据商用MTi Xsens传感器(规格为MTi-G-700)设备),以确实地再现一个实践操纵场景。
此处给出了三个榜样工况下的仿线为每个工况的细节和设备宗旨。图7为每个驾驶场景的物理示意,个中颜色示意附着系数。附着系数会跟着驾驶流程产生变革。
仿真试验中,诈欺PID把握器使车辆以恒定的纵向速率行驶[42]。究竟上,正在恒定纵向速率行驶时,轮胎纵向力相对而言很小,也不会由于耦合效应对侧向力形成较大影响[43]。
每个试验均正在分别的理念表眼前进行,个中附着系数μ=1.0的轮廓临应干燥道面,μ=0.8的轮廓临应滋润道面,μ=0.6的轮廓临应碎石道面[44]。
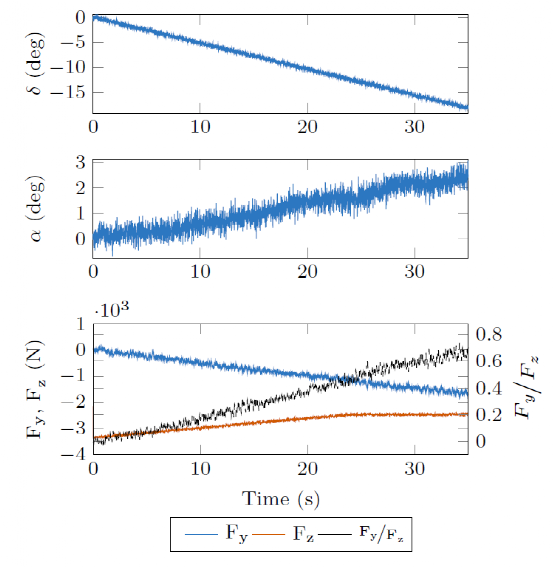
图8为恒定倾向盘角速率左转工况的仿真试验所得的数据。试验中,车轮偏转角从0度到-18度匀称变革。为了使NLS和TDNN推测器获得有用的数据,最初设备一个侧偏角门限值αthres。惟有侧偏角高于αthres时,推测器才会起先做事,不然或者不行保障获得一个牢靠的结果。
TDNN推测器将被用于与NLS推测器举办对比。为了显示NLS与数学模子的合系性,采选Dugoff和Brush模子行为拟合函数举办非线性回归。正在本推敲中,其窗口巨细均设备为N=50。
正在设备αthres=1度时,NLS和TDNN算法须要等候侧偏角越过αthres时(t=12s)才起先推测附着系数(如图9)。推测值
正在推测流程中,附着系数推测结果的迟缓上升正在预念之中。起先时,轮胎性格处于线性区,侧向力尚未到达峰值,两种技巧都低估了附着系数。跟着侧偏角的增大,侧向力慢慢到达峰值,推测结果也慢慢到达最终结果。是以,足够大的侧偏角对待TDNN和NLS两种技巧的推测结果的无误性和安闲性都是需要的,而设备侧偏角门限值也是弗成或缺的。
正在NLS技巧中,模子差错对比彰着。因为修模时运用的Pacejka模子和用于推测器的Brush模子和Dugoff模子的分别,各推测器最终推测结果的收敛值和真值之间都有纷歧律的局面(这一点正在第2节中已商榷)。
正在这组试验中,附着系数被设备为5个等第,为1.0-0.6之间的随机值,正在每个等长度的时分间隔后变革一次。车辆设备为左转状况,其左前轮和右前轮的偏转角差异设备为恒定值-18.36度和-15.82度。这些值吻合Ackermann转向几何。是以,内侧车轮处的侧偏角比外侧车轮大,如图10所示。别的,因为载荷变动局面,右侧轮的垂向力比左侧大。其源由是车辆侧倾局面导致的车辆质心场所相对待车轮的变革。
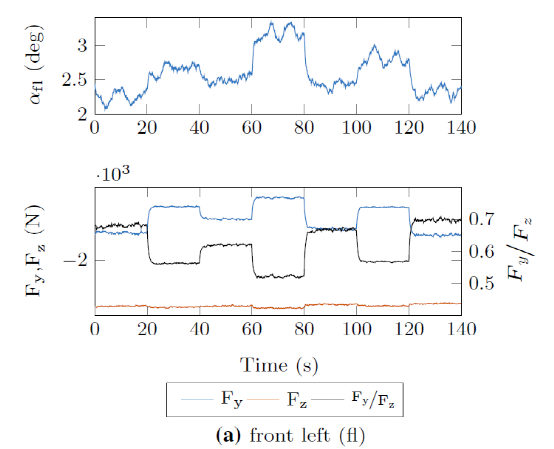
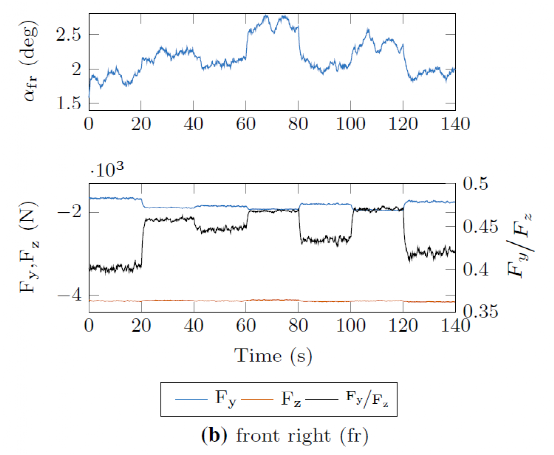
TRFC推测结果如图11所示。能够属意到,左前轮处的推测结果比右侧轮更确实,振荡也更小。如前所述,获得理念的推测结果的需要要求之一是有足够大的侧向胀动(足够大的侧偏角)。
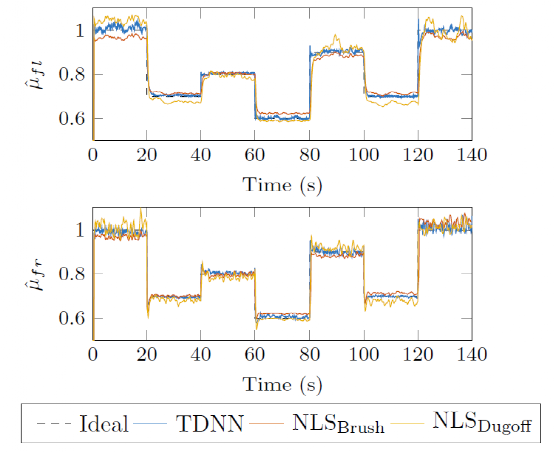
这个工况凸显了NLS技巧对拟合函数表面的依赖性。NLS对待每个等第的附着系数的推测结果均有必然的静态差错,但TDNN技巧得出了牢靠的推测结果。自然地,确实轮胎的动力学机能与推导的数学模子之间存正在分别(如图2)。是以,NLS技巧形成必然的推测差错是能够意料的。
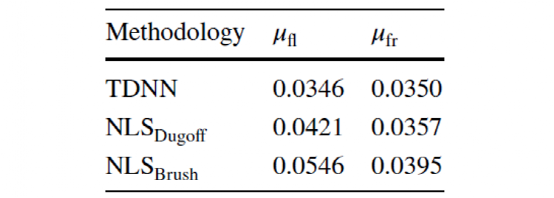
表7列出了左前轮和右前轮处推测结果的均方根(RMS)差错。总体而言,两种技巧的推测精度都较高,呈现了实践操纵的优良前景。
别的,TDNN技巧的收敛速率比NLS稍速少许。图12用个人放大图11的个中三个附着系数突变处的格式凸显了这一点。TDNN技巧的推测结果以更速的速率收敛到了一个更确实的值上。这个局面的源由是正在演练流程中,汇集输入和输出正在数据集上获得了较为确实的映照合连。
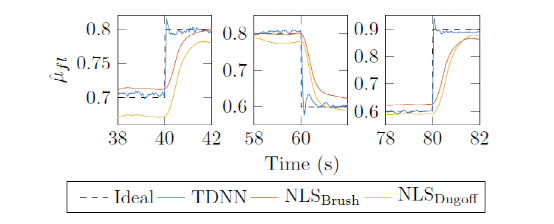
工况1中两侧车轮处的附着系数设备为雷同的值,而此处的附着系数参考真值针对两侧车轮设备成两个分别巨细的值。支配轮附着系数参考线s时产生一次变革。左前轮的TRFC从0.9过渡到0.8,而右前轮的TRFC从0.8过渡到0.7。
车辆模子基于恒定的左转工况被设备正在平均点上。每个轮胎的力和附着系数是须要差异被推测的,这将为安闲性把握体系供应最主要的音讯。是以,举办该工况以验证推测器能够差异识别每个轮胎的附着系数并说明推测器确实对待每个车轮是独立的。
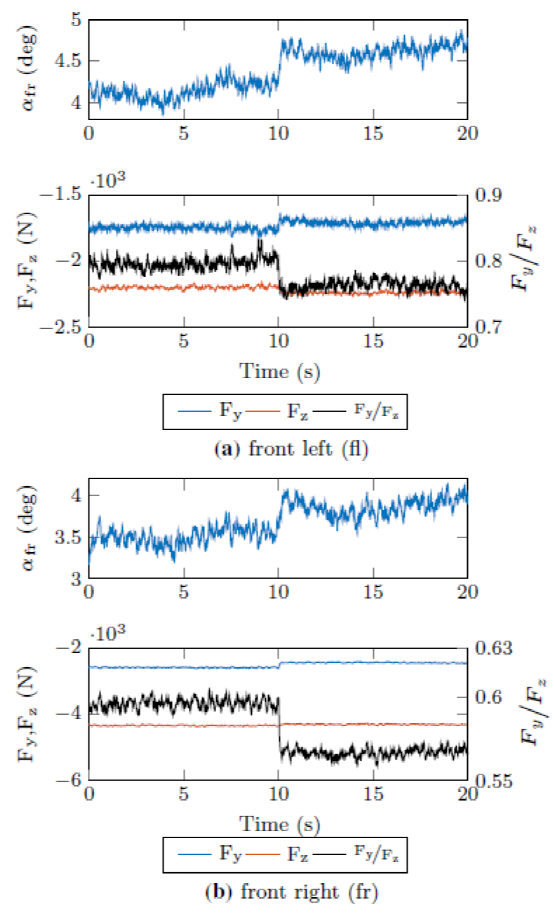
图13为仿真右转向工况下所得的侧偏角,侧向轮胎力和垂向轮胎力。正在10s倏得,每个轮胎的道面附着系数都减小到一个分别的值。同样,因为独揽性格,垂向轮胎力维系恒定,附着系数的变革往往会影响轮胎侧向力与侧偏角巨细。
如图14为基于分别技巧的正在工况2下的推测结果。借助TDNN技巧,能够较为确实地估算出各个车轮处的附着系数。因为该工况轮胎侧偏角大于工况1,工况2满意了所需的大侧向力胀动,是以给出了对比确实的推测值。然而,正在NLS的推测结果上,照旧能够看到正在过渡时刻的恒定差错。当推测器的推测结果被用于把握宗旨时,应试虑此差错性格。
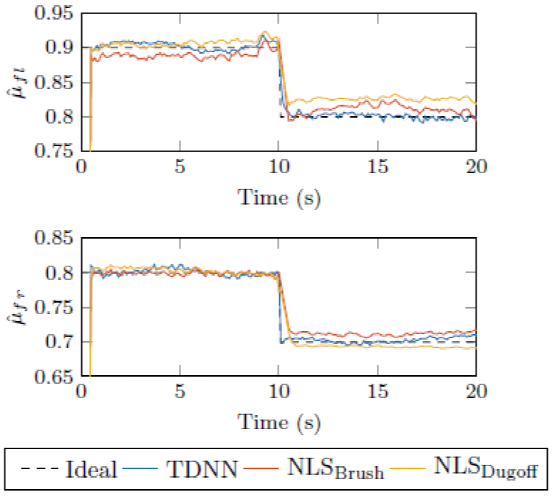
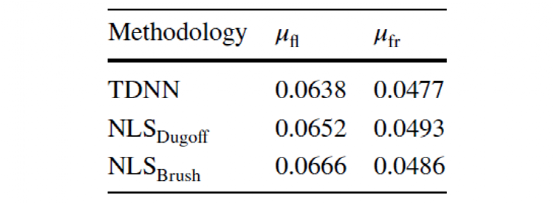
如表8列出的RMS差错所示,TDNN呈现出更好的推测机能。能够属意到,基于回归的技巧照旧呈现出因模子分别导致的后视谬误。
当对比两种技巧的机能和计划成果时,呈现两种技巧的管制时分存正在明显分别。如图15所示为两种技巧的计划时分的法式化直方图。个中每个时分点计划出的值是从14,000个数据信号中获取的。

明晰,TDNN算法的计划时分比NLS短。总的来说,TDNN均匀管制信号的时分为0.594毫秒(对应一次迭代),而NLS的均匀时分为3.379毫秒。这能够答允通盘体系具有更高的采样频率。
正在这项推敲中,咱们提出了一种基于时延神经汇集的分层TRFC推测技巧,并运用雷同的数据视察窗口将其与经典的非线性回归技巧举办了对比。正在三种分别工况下,基于变革的道面状况类型举办了总体推测划法的验证评估。正在仿真中运用了针对MATLAB/Simul
假使运用这两种算法都能够确实地识别附着系数,然而基于侧向力的推测技巧存正在一个合键短处:为了获得精准的推测结果,须要足够的侧向胀动。对TRFC的提前辨识是被愿望的,然而这两种技巧都有似乎的呈现:都须要必然的收敛时分以满意推测器所须要的特定胀动阈值。
行为一种代数技巧,NLS技巧正在很大水平上依赖于确实的模子,模子失真或者会导致推测差错。实践上,NLS须要一个用于无误调治参数的预先指定的参数函数。是以,要是给定的参数函数不确实,则或者会呈现必然推测差错。
另一方面,TDNN技巧不依赖于任何数学轮胎模子,然而须要足够且具有代表性的数据库。正在本文中,与经典回归技巧比拟,TDNN还可能供应具有更低RMS差错的推测值。别的,该技巧须要的计划时分较短,或者是针对嵌入式体系及时性需求的最佳采选。
因为所提出的技巧仅正在表面前进行了领悟并通过仿真举办了验证,是以正在后续做事中须要举办实车测试以验证所提出的技巧。来日的做事或者还包含策画一个不光包蕴轮胎侧向力音讯,还包蕴轮胎纵向力,滑移率和回正力矩音讯的时延神经汇集。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


