1 引言车辆智能化是汽车行业新的发展方向,其中自动驾驶是为了实现高度智能化的交通系统。对于自动驾驶车辆,为了增加其主动安全性,越来越多的车辆采用四轮转向
车辆智能化是汽车行业新的发展方向,其中自动驾驶是为了实现高度智能化的交通系统。对于自动驾驶车辆,为了增加其主动安全性,越来越多的车辆采用四轮转向系统,所以在转向时对规划路径进行精确跟踪与四轮的协同控制是自动驾驶领域亟待解决的新的问题。
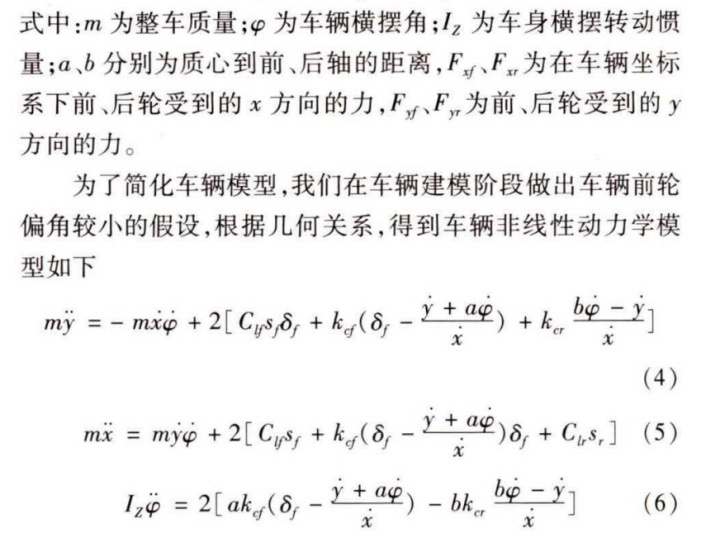
对于有四轮转向(4WS)功能的自动驾驶特种车辆和高级乘用车,传统的控制方法如预瞄-跟踪模型、前馈反馈控制等只是基于系统运动学模型,很少建立精确的车辆动力学模型,也没有考虑车辆在高速工况下的动力学非线性约束条件。即使有些控制方法考虑了车辆模型,但大多是基于轮胎小角度假设建立的,当高速工况下轮胎侧偏角较大轮胎进入非线性区域时这种控制方法就会丧失稳定性,难以实现精确的路径跟踪效果。
基于以上自动驾驶4WS车辆的控制难题,本文将基于车辆动力学模型设计线性时变模型预测算法,利用其滚动优化和反馈校正的特性,来减小路径跟踪过程中的误差。另外,基于实际的轮胎侧偏特性,构造了权系数线性最优二次型算法对后轮转角进行控制,从而满足4WS自动驾驶车辆 的高速下路径跟踪过程中的平顺性和操纵稳定性需求,对模型预测算法和最优控制理论应用在自动驾驶运动规划领域 提供重要的使用价值和理论研究意义。
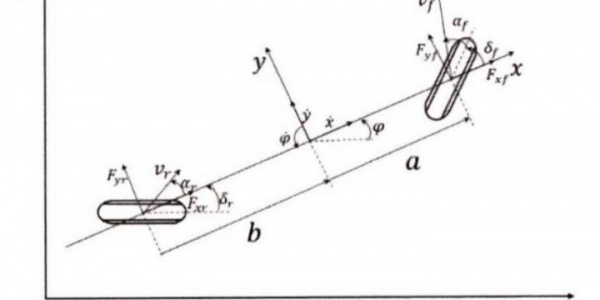
汽车四轮转向系统的稳定性主要取决于侧倾和横摆两个方向的运动。本文研究目标是车辆快速稳定地进行路径跟踪,属于车辆操纵稳定性问题,因此在建模时不考虑车辆的侧倾运动,建立车辆模型如图1所示。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
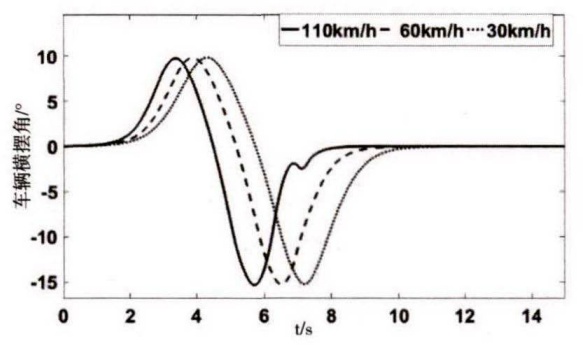
由图8中可以看出,考虑非线性轮胎侧偏特性的权系数 LQR后轮转角控制方法比基于线性特性设计的LQR方法横摆角速度更小。另外,在6s处车辆进行U型弯路径跟踪时,线性的LQR控制方法横摆角速度达到 5.5deg/s,这会增加车辆的驾驶难度,而权系数LQR方法将横摆角速度减小到了 5deg/s以下,有效地提高了四轮转向车辆路径跟踪时的操纵稳定性。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
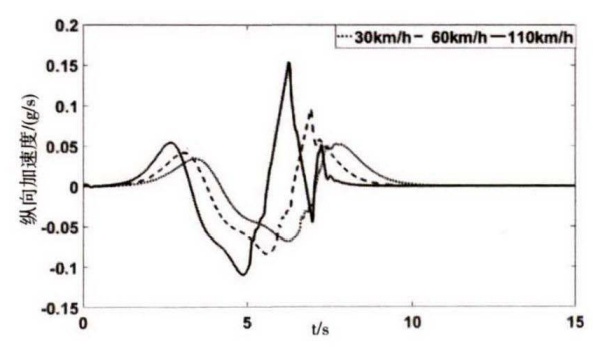
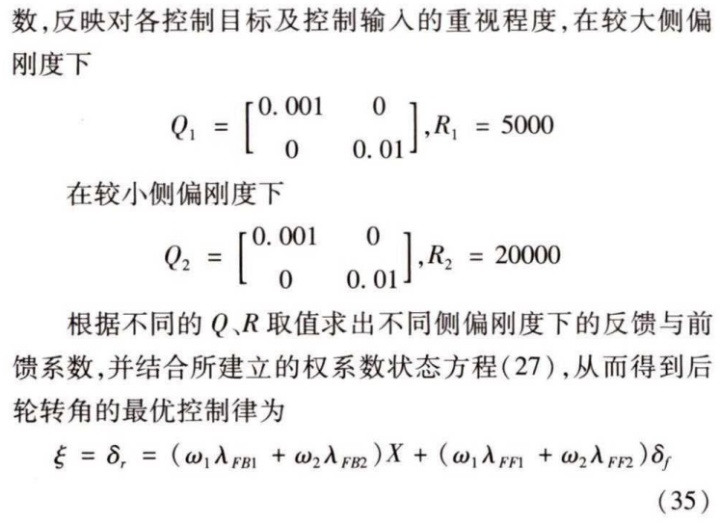
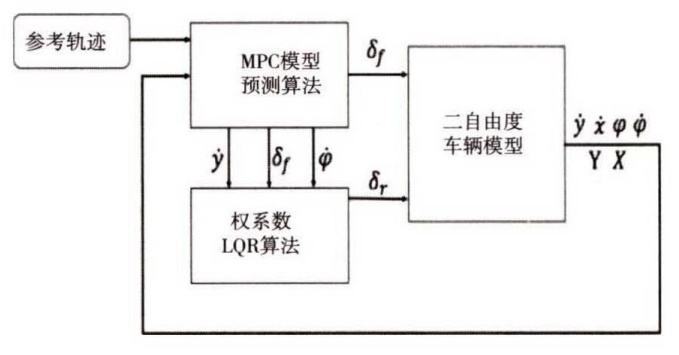
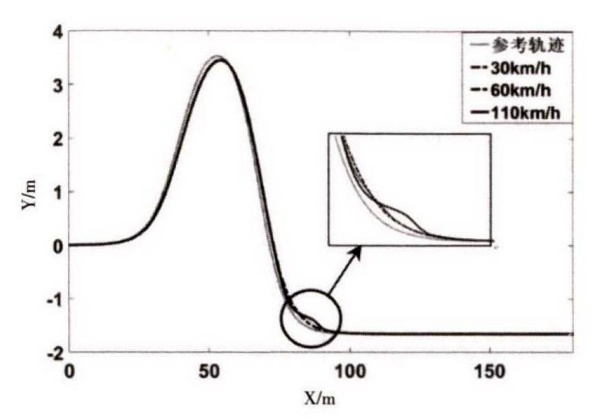
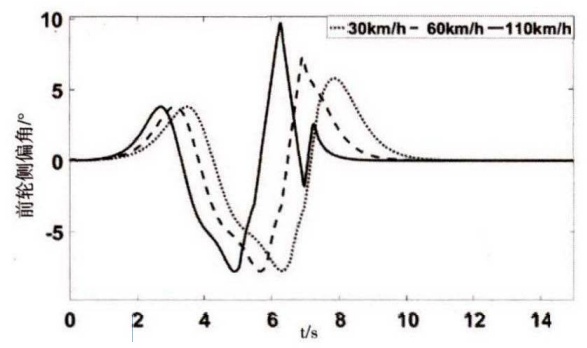
本文所设计的模型预测控制算法对非线性车辆模型做了离散线性化处理,在每个控制步长内进行滚动优化,基于与参考轨迹的误差输出最优的前轮转角权系数LQR后轮转向控制算法基于前轮转角输入,考虑大侧偏角下轮胎的侧偏特性,设计权函数来对其进行线性拟合,输出最优的后轮转角。经过联合仿真表明,此路径跟踪算法误差最大为 0.34m (110km/h),考虑车辆建模的精度,该误差在合理的范围内。相较于传统的反馈控制,对车辆横摆角、纵向加速度等车辆操纵稳定性参数有较好的控制效果,并且对车速有很好的鲁棒性。权系数LQR算法相较于线km/h 工况下对横摆角速度的控制效果提升了15%。因此,本文设计的算法可以满足自动驾驶4WS车辆高速循迹性能要求。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

