当今汽车制造业在自动驾驶和ADAS传感器融合领域的发展正迅猛推进,各种不同类型的传感器如毫米波雷达、激光雷达、超声波雷达、摄像头以及它们的组合所形成的网络
当今汽车制造业在自动驾驶和ADAS传感器融合领域的发展正迅猛推进,各种不同类型的传感器如毫米波雷达、激光雷达、超声波雷达、摄像头以及它们的组合所形成的网络是车辆能够感知周围环境的重要要素。通过30多年经验积累,NOFFZ Technologies 公司业已开发并完成许多安全高效的测试方案,来应对当前和未来车辆联网和传感器融合技术方面的挑战。特别是在自动驾驶领域,包括从辅助驾驶到自动驾驶,德国公司提供了多种测试系统,主要涵盖:
• 连通性(紧急呼叫系统eCall,网络接入设备NAD,远程信息控制单元TCU,智能天线系统;

雷达传感器技术是侦测周围环境,实现自主驾驶的核心要素,它通过电磁波反射,精确地判断障碍物的速度和距离,从而自动调整驾驶行为。因此,这些传感器的精度不仅对检测目标的精度和分辨率有绝对影响,而且最重要的是关乎车辆内人员的安全。
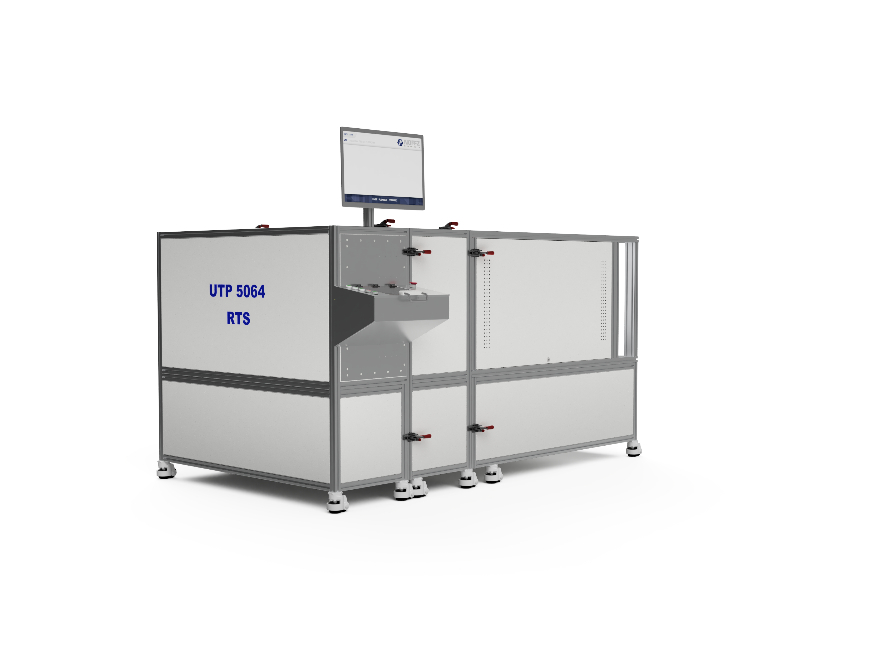
NOFFZ Technologies 开发的UTP5065 RTS雷达测试系统是一种紧凑型测试方案,可应用于生产终端测试。它的垂直占地面积仅为0.8 x 1.5米,空间利用率极高。与水平放置测试方案相比,可节省大约70%的占地面积。
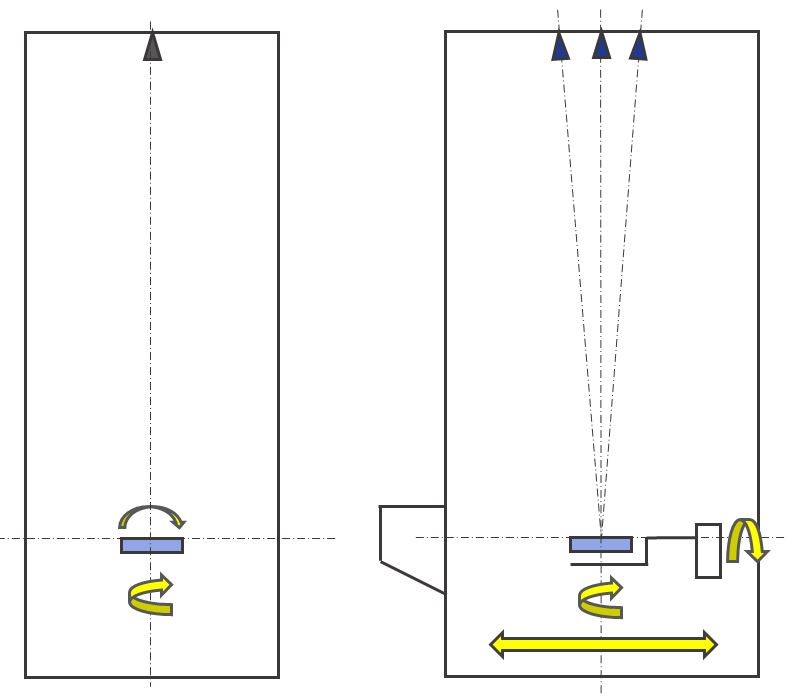
另一个线性运动机构将待测传感器对准测试位置并执行它的输送和返回操作。被测传感器的测量和校准是在一个屏蔽无反射暗室中进行,这极大地减少了来自外部信号的辐射,也避免了暗室内部的多次反射。
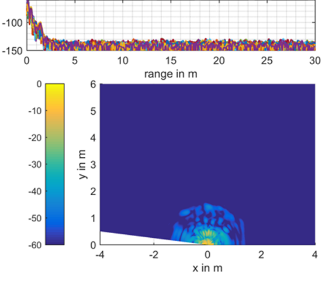
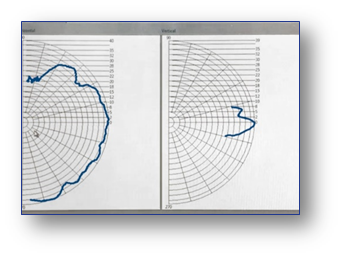
为实现传感器校准,测试环境需要尽可能保持在极好的反射抑制条件下(吸波暗室)进行。在校准过程中,将在方位角(水平)和仰角(垂直)极化方向测量RX/TX天线特性。该校准测试允许雷达传感器在运动方向、相对距离、大小和相对速度等方面尽可能精确地对目标障碍物行目标追踪和分类。
UTP 5065 RTS中集成了频率带宽为4GHz的目标模拟器。它能够完成在单个目标障碍物和目标速度可变条件下,实现信号延迟处理和在不同距离条件下进行目标障碍物调节合成。
为实现仿真,喇叭天线将侦测到的雷达辐射信号转换成数字或模拟的光信号。通过数字延迟或设定光纤距离,得到所需的延迟信号,该延迟相当于模拟障碍物距离。
通过改变发射功率值修改目标障碍物大小或雷达散射截面(RCS)。使用带有本振频率的RF混频器对输出频率稍微修改时,相对速度也将会发生变化。“多普勒频移”表示障碍物目标的相对移动速度。
不同独立目标障碍物可以在同一方向或不同相对角度来进行模拟。目标模拟器的发射天线可以以不同角度在吸波暗室中布置。这样做的优点是传感器可以在距离目标模拟器较远、不同目标参数的紧凑测试环境中进行。
雷达传感器测试系统不仅应用于生产终端测试,还可应用于验证性测试。验证性测试的要求与生产终端测试有很大的不同,因此许多相关事项必须在开始得到考虑。在验证性测试中,需要对传感器的特性进行测试,并考虑产品使用时的极限值。验证性测试首先需要考虑实现不同测试参数的模拟和测试环境的变化,特别是:
通常UTP 5065 RTS测试系统可用于天线、发射器、收发器、收发接收模块等,频率范围覆盖从868MHz到80GHz以上,但汽车雷达传感器是它的主要应用领域。
UTP 5065 RTS测试系统在OTA领域中也可以应用于RFID,车载多媒体娱乐系统,WIFI,4G,5G或其他ISM频段测试。
在低于6GHz的频率测试环境中,通常是非常有必要对外部信号辐射进行屏蔽。而在更高频率测试环境下(如毫米波),这种屏蔽与频率的增加关系不是很大。
在汽车应用领域中,雷达传感器测试主要包括近程、中程和远程测试。它也可以应用于其他测试对象,如内部传感器或车门开启传感器等。
UTP 5065 RTS测试系统设计中处处追求最高速度,主要体现在操作时间短,测试时间短以及快速和精确的传感器移动。

NOFFZ Technologies公司开发和生产行业领先的测试系统和解决方案,涵盖从原型机验证到批量生产的整个产品开发测试周期。
公司是由Wilfried Noffz先生于1989年创办,目前在全球拥有8个办公点,职员人数超过150人。
汽车测试网-创办于2008年,报道汽车测试技术与产品、趋势、动态等 联系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

