FEV行为国际领先的整车及动力总成软硬件开垦商,通过应用分散式协同仿真订交(Distributed Co-Simulation Protocol, DCP),率先将协同仿真工夫用于自愿驾驶开垦
FEV行为国际领先的整车及动力总成软硬件开垦商,通过应用分散式协同仿真订交(Distributed Co-Simulation Protocol, DCP),率先将协同仿真工夫用于自愿驾驶开垦。这是该新订交初次用于自愿驾驶功用,这将对自愿驾驶体系开垦出现紧张胀动用意。
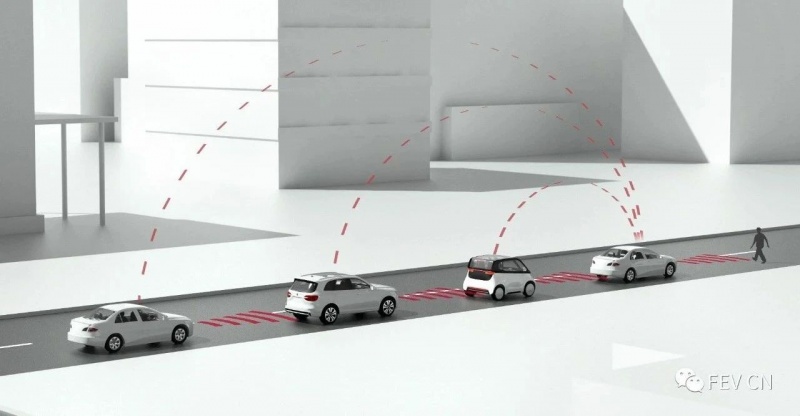
自愿驾驶功用的开垦面对少少特有的挑衅,特别正在网联方面。通过跟周边车辆的直接通讯,协同体系可能升高驾驶平安性,好比:越过物理攻击物、识别方针并预测方针运动轨迹。但是,这些体系运转的处境特别繁复且不行预测,征求开垦和验证的全新挑衅。
“车载嵌入式协同体系(CES)带来了新的挑衅,好比体系平安危急的增补和本能央求的晋升,以确保体系正在动态、不行预测的处境中平安有用地运转”,FEV高级驾驶辅助体系(ADAS)和自愿驾驶体系(AD)高级开垦总监ElmarBörner指出,“这类体系所央求的不行预测运转要求包罗无尽种潜正在情景,使得举行全方位物理测试变得难以推行。”
为应对这些挑衅,需求通过协同仿的确现虚拟处境测试。“协同仿真”是指挥用一个协同仿真的主措施集成众种区别仿真东西用于虚拟开垦,好比FEV虚拟实行的及时软件xMOD。日常来说,输入的模子数据可能被编译并直接通过附属运用措施导入,好比通过功用模子接口(FMI)。可是,也有少少模子类型无法实用这种形式,好比用开源都邑驾驶模仿器CARLA这类东西开垦的3D处境模子。这类模子仍然绑定它们的实施平台,于是无法导入协同仿真主措施。
为了应对这种挑衅,FEV仍然应用新的分散式协同仿真订交(DCP)用于正在分散式平台上对区别模子的实施举行时分同步。xMOD中DCP支撑将新仿真模子以至是硬件集成到以前集成设施不兼容的协同仿真平台中。行使DCP可界说模子的硬及时、软及时和非及时操作,以及现有模子的交流应用处置计划。最终,它使得协同嵌入式体系(CES)或许把持繁复的搜集物理仿线D仿真处境中调控众个车辆。
“因为开垦早期软件的道途测试比力贫乏,于是虚拟测试对自愿驾驶运用来说是必不行少的”,Börner说,“繁复的搜集物理体系仿真和协同仿真正在虚拟测试中担当了紧张劳动。FEV初次将DCP协同仿真尺度用于自愿驾驶的开垦。这种工夫途途可能助助开垦者集成和措置市情上区别的仿真平台,以应对的确交通处境中的车辆的动态场景。”
为实用少少前沿仿真东西,这种工夫途途还供应一种设施使得繁复仿真可能措置和应对动态场景,好比区别的交通和处境场景,或者协同体系中的动态变换。
汽车测试网-开办于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
