摩登社会中,跟着车辆的普及,人的营谋领域正在慢慢扩张,单单寄托人类追念指示行驶抵达目标地一经越来越不的确质,是以车载导航就饰演了越来越要紧的脚色。
守旧车载导航遵循GPS将用户车辆处所定位于舆图上,导航软件遵循设定的目标地计议行驶旅途,通过屏幕显示和语音播报的时势指援用户行驶至目标地。如此的显现格式使得用户正在行使导航的经过中,必要将舆图指引消息和语音播报消息与现时自车所处确凿切宇宙接连起来,材干明确指示消息的完全寓意,之后做出相应驾驶举措。
然而,试念如此一个场景,行驶前哨有个岔途,因为没有听大白必要走左前哨依然右前哨,这个时辰就很容易错过变道机会。
是以,AR导航使用视觉手艺,归纳导航消息和确切场景消息,优化了指示消息表示时势,低重了用户的接受和明确本钱,所睹即所得,用户只用遵循导航消息活动即可。
车载AR导航是指通过摄像头将车辆前哨道途确凿切宇宙及时地搜捕下来,使用挪动端视觉识别手艺及算法,及时地识别车辆行驶场景中的各样要紧导航因素,比方车道线、前哨车辆、车道相对处所等,再连系自车GPS定位、舆图导航消息,通过众元消息的交融以及揣度,天生虚拟的导航指引模子,并衬托叠加到确切场景上,从而创修出更靠拢驾驶者线 AR导航
正在驾驶车辆经过中,车道线的要紧性不问可知,它通过分歧的属性,比方虚、实、黄、白等,来指引车辆的行驶宗旨,样板驾驶员的驾驶作为,避免车辆之间的碰撞,最终完毕尤其高效和贯通的交通。

正在AR导航中车道线同样要紧,及时车道线检测可以为AR导航引擎供应现时车道宽度、车道线属性等消息,从而提前对用户做出无误的指示,指引驶入无误的车道。
如上图所示,通过车道级定位将自车定位正在现时途左数第二车道,这时遵循导航消息前哨将要左转,与此同时通过车道线检测获知左侧车道线为白色虚线,许可变道行驶,再通过车道宽度和自车正在车道内距操纵车道线的间隔,衬托出无误的指示线,指援用户提前变道驶入左数第一车道,避免错过途口,导致偏航行驶,奢华年华元气心灵。
相合车道线检测的讨论一经接续了对比长的年华,虽说一经博得了肯定的成效,然则念要实质行使还是具有尽头大的寻事,导致这种近况首要有以下几个方面的缘故:
图像质料题目:摄像头采撷获得的图像因为车辆遮挡、树木和兴办的暗影、车辆挪动带来的光照热烈转折等缘故而转折重大;
车道线磨损水平纷歧:高速和都市速捷途车道线较懂得,低品级道途磨损较主要,与轮胎划痕难以分别;
车道线宽度纷歧:经常来说车道线m之间,但正在实际宇宙中,奇特是低品级道途,车道线宽度转折较大。
众样雄厚的场景给基于视觉的算法带来了重大的寻事,本文将对车道线检测计划举办讲述,并以是否行使深度练习为界,分为以下两个大的编制来先容:基于特质工程的守旧视觉计划和基于图像割据的深度练习计划。
守旧视觉计划里,车道线检测经过较少行使机械练习手法,首要是使用车道线的视觉特质和空间处所联系完毕车道线检测提取,经常来说分为以下几个环节:
预收拾:对图像举办预收拾,经常征求车辆等毛病物去除、暗影收拾、规定感意思区域(ROI)、前视图转为俯视图等;
车道线候选点提取:基于颜色和纹理,针对车道线特征打算特有的图像特质提取格式,常用的手法有灰度阈值收拾、颜色阈值收拾、边沿提取、特定滤波器滤波等;
车道线拟合:正在获取到候选点之后,通过极少先验常识(如车道线正在俯视图上是平行联系)配置法规,去除一一面outlier车道线候选点,之后可采用参数方程的格式,举办车道线的拟合。常睹参数方程有直线、二次弧线、样条弧线等,分歧的拟合算法对职能也有很大的影响,此中RANSAC算法可以较好分别outlier和inlier,以是正在车道线拟合经过中获得了普通的合怀;
后收拾战略:通过坐标照射,使用车辆行驶经过中年华和空间的连绵性,完毕车道线跟踪和滤波,从而降低车道线检测的平静性和无误性。
守旧视觉计划检测车道线经过依赖较众的先验假设,特质打算依赖阅历阈值的调度,正在实质行使中无法应对杂乱的道途境况,是以鲁棒性较差,更加是正在光照条款转折、车道线磨损水平分歧的影响下,阅历阈值尽头容易失效,导致较差的检测结果。
然则因为其揣度量较小,正在算力受限且途况简单(高速/都市速捷途)的场景下,还是可能阐述它的代价。
深度练习图像割据自2014年FCN提出此后发达急忙,正在浩瀚的图像工作中博得了超卓的结果。而且因为车道线正在ADAS和自愿驾驶工作中的异常名望,可能将车道线检测慢慢从通用的割据工作中独立出来,而且博得了较大的开展。
基于图像割据的车道线检测计划收拾流程与守旧视觉计划雷同,首要区别正在于车道线候选点的提取格式上,车道线图像割据不必要合于车道线的纹理/颜色/宽度/形式等先验假设,而是通过机械练习从练习样本中获取车道线的合连消息,自愿地练习车道线的特质,完全行使时便可能通过练习获得的消息,来预测单个像素处所是否为车道线。
因为正在较众的行使场景中只合怀现时车道车道线,大大都计划是先识别总共的车道线,然后通过空间处所联系举办后收拾,提取浮现时车道车道线,但这个经过中容易犯错,平静性较差,Jiman Kim正在2017年提出正在图像割据时给予现时车道操纵车道线分歧的种别,把单条车道线当做割据的一个实例,通过End-to-End格式,直接从图像中提取浮现时车道的操纵车道线,从而避免了后收拾经过中分别操纵车道线,低重犯错概率。
商汤科技Xingang Pan针对车道线颀长的构造特征,提出Spatial CNN交换MRF/CRF构造,正在高度和宽度宗旨(从上至下,从下至上,从右至左,从左至右)逐层举办卷积,以巩固消息正在空间上的流转,实例割据以现时车道为中央的4条车道线,与此同时输出单条车道线的置信度,可认为实质行使的众元消息交融供应按照。该计划正在图森将来举办的Lane Detection Challenge上博得了第一名。
已往视视角看,车道线最终都交汇于没落点,为了让搜集练习图像中的构造消息,Seokju Lee提出了一个众工作搜集,正在检测车道线的同时检测地面符号和没落点。针对没落点的特征,作家打算了一个灵活的构造用于检测没落点,并通过实习注明了没落点工作的插手降低了车道线的检测效率。
比拟于检测指定命目的车道线,Davy Neven正在2018年提出将完全车道线当做一类举办语义割据获得Binary lane segmentation,与此同时搜集输出Pixel embeddings结果,提取Binary lane segmentation前景区域像素点正在Pixel embeddings输出上的特质值,行使聚类算法,确定每个像素点的车道线种别,从而完毕大概命目的车道线实例割据,以符合分歧的车道线场景。
综上,比拟于通用图像割据,车道线割据计划首要正在使用车道线之间的处所构造联系,针对车道线颀长的特征,优化深度搜集的空间消息提取技能,并将更众的后收拾劳动融入至搜集中,淘汰后收拾难度和犯错概率。
车载AR导航恳求将指示因素及时迭加到确切场景中,这看待AR导航中的车道线检测及时性平和静性提出了极高的恳求,与此同时,因为车载兴办(车机/车镜)的硬件算力较差,日常落伍于手机芯片3-5年,以是AR导航中的车道线检测必需做到又速又好。
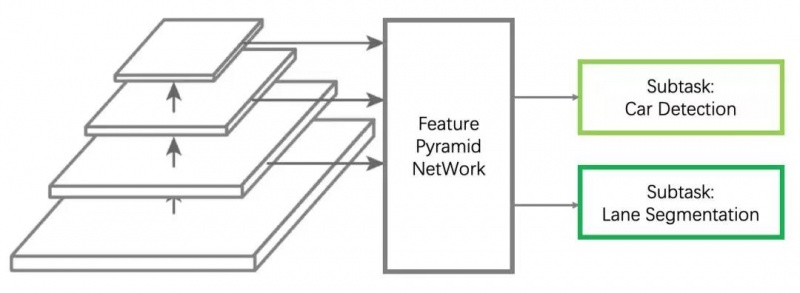
因为交通图像中车辆和车道线有肯定的合连性 (车辆日常境况正在两条车道线中央),为了饱满的使用深度练习搜集技能,共用搜集主干一面提取到的图像特质,咱们打算了一个高效的众工作搜集(图2所示),单个模子竣工车辆检测、车道线检测工作和其他工作,并正在此根底上,完毕了一套众工作权重自练习的机制,保障各个工作高效饱满的练习,最终使得众工作练习模子抵达独立单工作模子持平的识别效率,一面工作乃至略有胜过。
正在众工作模子迭代的经过中,众工作样本的标注本钱较高,借使必要增加某个工作的数据集,则必需正在该数据集上对完全的工作举办标注,花费较众的标注资源。从迭代模子和使用已有的独立工作标注数据角度启程,咱们研发了一套以工作为粒度的练习框架,许可单张图片有随便个工作举办了标注(例如只标注了车道线,或者同时标注了车辆和车道线等)。
因为和车辆共享主干搜集,车道线的ROI配置从图像输入转化至车道线割据分支的特质层,进一步低重了车道线检测分支的揣度杂乱度,最终车道线检测分支仅占用原有车道线 没落点优化车道线检测
第一种是通例的道途场景割据标注:正在这种境况下,标注法规服从车道线的物理寓意,跟着车道线由近及远、由粗变细,如KITTI、CamVid等数据集。正在这种标注法规下可以较切确的获取车道线内侧间隔车辆的间隔,降低横向车道定位精度,但因为远方车道线较细,特质不清楚,车道线割据精度跟着间隔的扩充慢慢低重。
第二种标注格式常睹于纯粹的车道线检测工作:如CULane等,这种标注格式将车道线界说为白色区域的中央线,以固定的图像像素宽度天生割据真值标注。比拟第一种格式,该手法可以正在肯定水平上降低远方车道线的识别效率,获得较完备的车道线。但正在举办车道线扩宽时,远方分歧车道线的真值容易相互压盖,变成堆叠一面车道线识别效率较差,扩充了车道线后收拾难度。
正在AR导航中,咱们采用第二种车道线标注格式,并正在车道线检测模子中扩充没落点识别分支,正在车道线后收拾中以没落点为锚点,优化车道线 深度练习神经搜集量化
深度练习神经搜集正在练习经过中,为了接受反向传布的梯度,完毕对模子权重的细小调度,日常采用高精度的数据花样举办揣度和权重的更新,最终竣工模子练习,存在模子构造和权重。
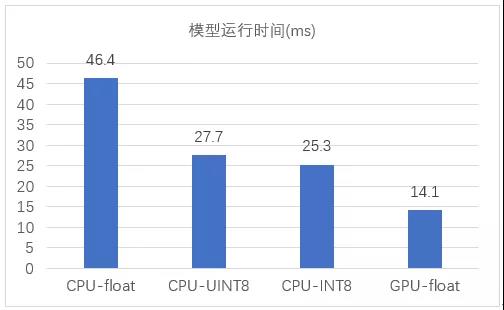
神经搜集量化便是将高精度的模子权重量化为低比特的数据,以行使更少的数据位宽来完毕神经搜集的存储和揣度,如此既能淘汰运算经过中的带宽,又能低重揣度量。因为挪动端CPU带宽资源有限,通过神经搜集量化,可能较大地降低模子运算的速率、低重模子空间占用,以TensorFlow为例,量化后的uint8模子与量化前的float模子比拟,速率降低1.2到1.4倍,模子空间占用低重3/4。
为了进一步优化神经搜集量化后的速率,咱们正在tflite-uint8(基于TensorFlow r1.9)量化根底进步行二次开采,完毕了一套tflite-int8量化框架,此中包蕴了量化模子练习、模子转化和自研的int8矩阵运算库,比拟官方tflite-uint8,tflite-int8正在挪动端A53架构上有30%的提速,正在A57架构上有10%的提速,与此同时,量化前后众工作模子的精度险些坚持褂讪。
最终通过上述手法,正在较低算力的车镜/车机芯片上完毕了及时平静的车道线检测,骨干提取后效率图如下图:
正在AR导航中,车道线有着举足轻重的名望,行动AR导航的根底,搭修正在其上的一系列导航功用的优劣都与它的检测精度息息合连。然而实质道途场景变幻莫测、气候光照也四序分歧,这些都给车道线的检测识别带来了较大的难度。
是以,正在后续的研发经过中,咱们将一向扩张笼盖领域,饱满使用高德自采的洪量道途数据的上风,连系合连传感器和导航数据一向完美和优化,来进一步地降低车道线的检测精度,以更好地供职AR导航项目,最终向用户供应更直观高效的导航供职。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
