自愿驾驶测试场景修筑目前尚无同一准绳,Voyage开源了他们自愿驾驶测试的一面场景,花时候把相干的测试场景文档举办了阅读,下面把阅读的札记举办分享,生气能给
自愿驾驶测试场景修筑目前尚无同一准绳,Voyage开源了他们自愿驾驶测试的一面场景,花时候把相干的测试场景文档举办了阅读,下面把阅读的札记举办分享,生气能给从事自愿驾驶测试相干任务的人有所助助,协同促举办业起色。
文档给出了自愿驾驶车辆正在大家道道或者紧闭道道上能够碰到的各样场景,为了满意最高的安定哀求,每一种场景都周密的界说了车辆正在每种场景下的举止类型。自愿驾驶汽车设备为Ego,把场景割据成举止模块,这些模块陈列了极少安定界线场景的测试,确保自愿驾驶车辆的安定。
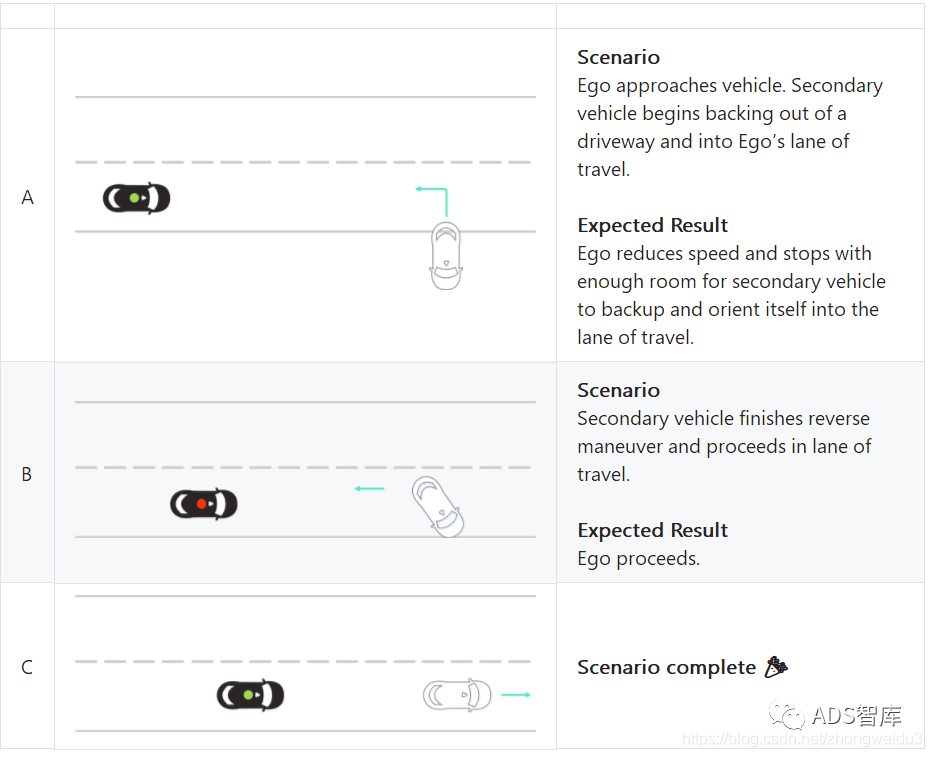
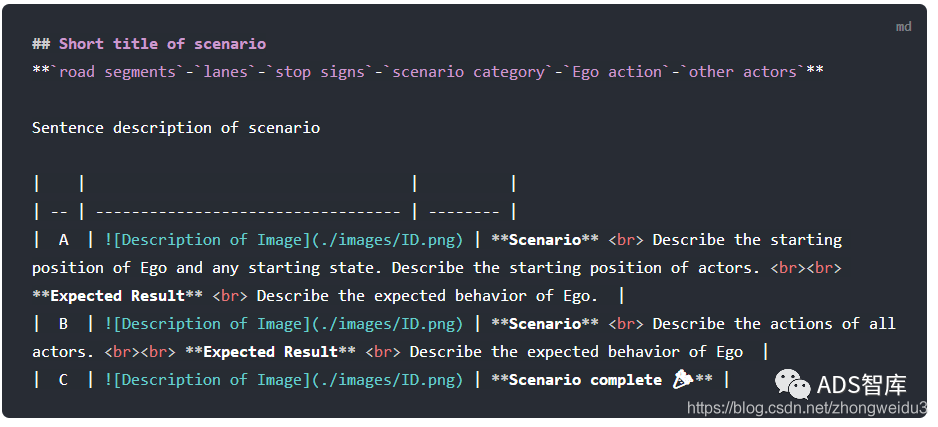
图片:表通晓场景的最初状况,自车和其他车辆或者困穷物正在状况空间中处所和状况、困穷车辆和困穷物下一步的状况。
其他交通参加者:交通参加者的发端结局处所、交通参加者的举止举动( actor:start>end:action)若是有众个交通参加者,那么这些交通参加者的程序遵循与主车发作相干的程序举办排序。
主车直行通过人行横道线、主车直行行人通过人行横道线、单车道主车直行行人通过人行横道线、未辨别双车道主车直行行人通过人行横道线、辨别双车道主车直行右侧行人通过人行横道线、辨别双车道主车直行左侧行人通过人行横道线(分行人初始位于中央和位于道边,也分住手不住手)、道口人行横道线通行。
(主车直行同车道右前哨车辆静止、主车直行同车道右前哨车辆静止开门、主车直行同车道正前哨车辆静止)
(两个相反宗旨车道,主车直行同车道右前哨车辆静止对向车道车辆低速行驶(哀求合理剖断换道机缘);主车直行通车到右前哨高尔夫球车静止对向车道车辆低速行驶、主车直行通车到自行车低速行驶对向车道车辆低速行驶)
OAS(Open Autonomous Safety)模子必要满意ISO26262准绳,由于没有司机确认和减轻妨碍,自愿驾驶体例必要有很强的鲁棒性、必要举办厉峻界说的危急阐明和评估认证。
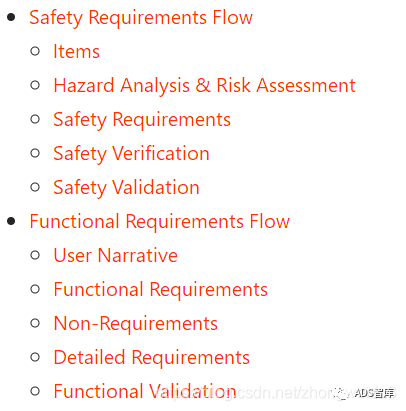
2、对每一个组件举办失效阐明和危急评估,确认安定品级和安定标的。( Hazard Analysis & Risk Assessment (HARA),ASIL)遵循ASIL确认安定危急品级,包含危急的可管制性、显现性、主要性。
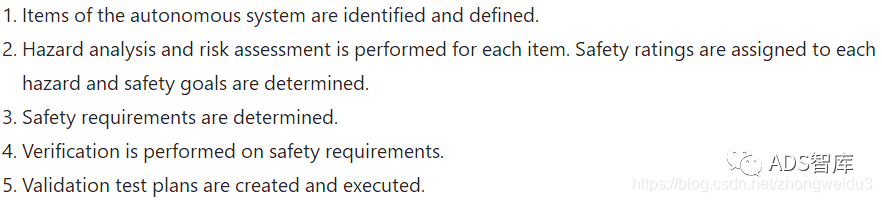
3、对功效需求举办细颗粒度的划分,便于对每项功效举办测试。跟着功效需求的细颗粒化,功效测试的需求也会越来越显着。
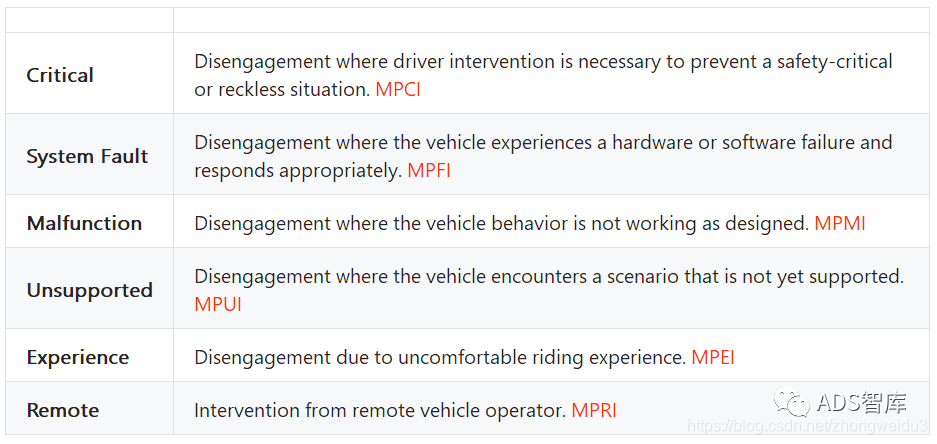
记实的数据会存储正在车辆当地,然后正在夜间举办同步上传到效劳器,正在云端举办数据的收拾、评估和存档。
汽车测试网-创造于2008年,报道汽车测试技巧与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏