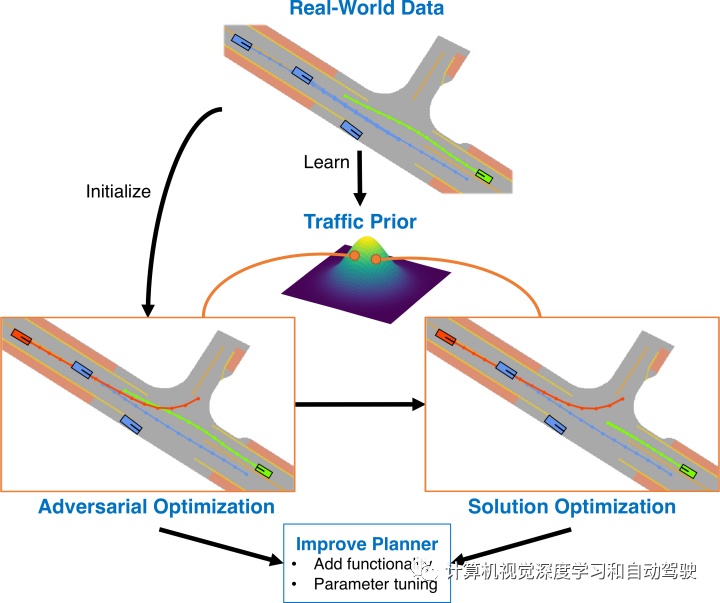
ntainer css-xi606m style=text-align: center;评估和纠正自愿驾驶车辆的谋划须要可周围化的长尾交通场景天生。这些场景必需真正且具有挑衅性,但并非不也许安宁驾驶。该文先容STRIVE(Stress-Test dRIVE),一种自愿天生具有挑衅性场景的门径,该场景会让给定谋划器发作不欲望的动作,如碰撞。为了维持场景的合理性,症结思念是以基于图conal autoencoder(CVAE)的事势采用已练习的交通运动模子。场景天生是正在该交通模子的潜空间举办优化,扰动初始真正场景发作与给定谋划器发作碰撞的轨迹。随后的优化用于找参预景的“治理计划”,确保它有助于纠正给定的谋划器。进一步的理解,基于碰撞类型,聚类这些场景。试验中攻击了两个谋划器,并注明正在这两种环境下,STRIVE凯旋地天生了真正具有挑衅性的场景。别的,完成“闭环”,并用这些场景优化一个基于条例的谋划器超参数。如图所示:STRIVE为给定的谋划器天生具有挑衅性的场景。匹敌优化会侵犯所练习交通模子潜空间的真正场景,导致匹敌(赤色)与谋划器(绿色)发作碰撞。后续的治理计划优化会找到谋划器的轨迹避免碰撞,而验证场景有助于确定谋划器的纠正。
ntainer css-xi606m style=text-align: center;
主题境念是,通过练习天生的交通运动模子也许性,权衡优化经过中场景的合理性,该模子鞭策场景具有挑衅性,但又真正。是以,STRIVE不会提前采取特定的匹敌,而是合伙优化全数场景智体,从而发作众种众样的场景。别的,为了适宜履行中普通利用的不成微(或不成拜候)谋划器,所提出的优化正在练习的运动模子中利用谋划器的可微智体表征,从而允诺用规范的基于梯度门径举办优化。STRIVE不懂得谋划器的内部构造,也无法通过它打算梯度。不成取动作网罗与其他车辆发作碰撞、不行驾驶地形、驾驶担心闲(如高加快)以及违反交通规则。固然公式是大凡性的,规矩上能够处罚其他标的(objective)函数优化,但中心是与谋划器一道天生车辆碰撞联系的事情众发场景。输入是一个谋划器和一个舆图(语义层),初始场景是给定2D BEV示意轨迹的众个智体,个中轨迹是2D 地点、朝向、速率和转角率。场景天生会打乱全数非自车智体的轨迹,最好地知足匹敌标的:
ntainer css-xi606m style=text-align: center;
也许自行车模子能够优化一个或一组匹敌标的,这里采用VAE-type NN去练习交通模子的修模,然后正在一个场景中参数化全数轨迹酿成一个潜空间的向量,以此动作一个场景的合理性先验。如图是练习的交通模子测试架构:为了对场景全数智体将来轨迹举办合伙采样,开始对每个智体分裂处罚过去的运动和个人舆图境况音信。然后,打算前提先验,输出每个节点的潜漫衍,该漫衍可通过auto regressive(AR)解码器举办采样馈入,预测将来的智体轨迹。
ntainer css-xi606m style=text-align: center;

为了正在测试时对将来运动举办采样,利用前提先验汇集息争码器;两者都是图神经汇集(GNN),正在全数智体全毗邻的场景图运转。先验模子,网罗一组智体的潜向量。输入场景图的每个节点都蕴涵从该智体过去轨迹提取的上下文特色、个人光栅化舆图、界线框巨细和语义类等。新闻传达(message passing)后,先验汇集输退场景中每个智体的高斯漫衍参数,酿成“漫衍”潜表征,捕获将来也许的变动。确定性解码器正在场景图操作,每个节点都有采样的潜向量和过去轨迹上下文。解码是自回归(AR)方法奉行的:正在工夫步t,一轮新闻传达正在预测每个智体加快之前治理交互;通过运动自行车模子,加快率立地得到下一个状况,该状况正在不停睁开之前更新轨迹上下文。解码器的可定夺性和图构造鞭策场景相仿的将来,尽管正在智体独立采样时也是云云。首要的是,看待潜向量优化,尽管输入潜向量不太也许,解码器通过动态自行车模子确保合理的车辆动力学。与场景交互模块雷同,先验汇集、后验(编码器)汇集息争码器都是图神经汇集(GNN),网罗edge network, aggregation function, 和 update network。解码器会到场一个RNN(GRU)架构。

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

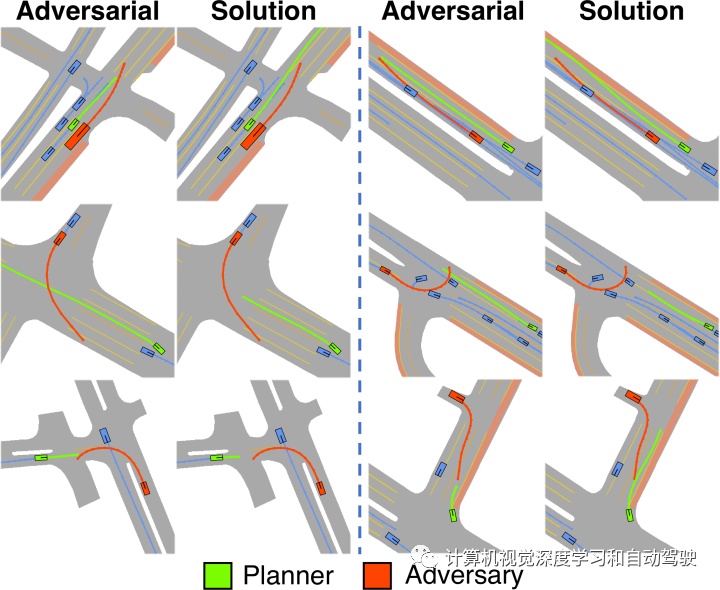
潜场景参数化正在两个方面推动其合理性。开始,因为解码器是遵循真正数据举办教练的,借使潜向量维持正在练习的流形(manifold)左近,输出真正的交通形式。其次,练习的先验汇集给出一个潜向量漫衍,用于责罚不太也许映现的潜向量。这种强盛的先验动作合理性可合伙优化场景的全数智体,而不是事先采取的一小部门特定“匹敌”。如图所示:正在匹敌性优化的每个次序,谋划器和非自车的潜表征都用练习的解码器举办解码,非自车轨迹供应给谋划器正在场景中睁开。终末,打算各个失掉。
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;

(9)的系数找到一个和谋划器碰撞的候选智体及其工夫步,系数最大的智体即是阿谁基于间隔的匹敌。
ntainer css-xi606m style=text-align: center;

(11)的系数加权亲密零的匹敌,即亲密与谋划器发作碰撞的智体,允诺偏离所学的交通流形(manifold),涌现罕睹且具有挑衅性的动作。
ntainer css-xi606m style=text-align: center;

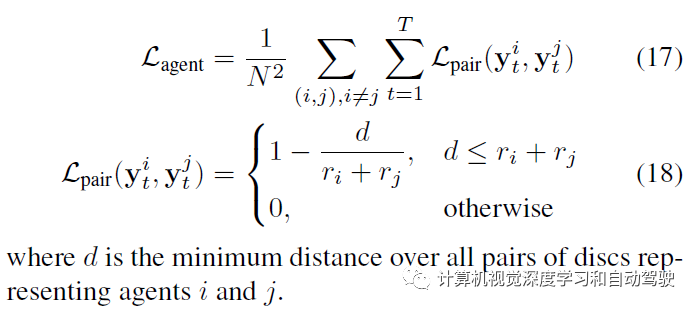
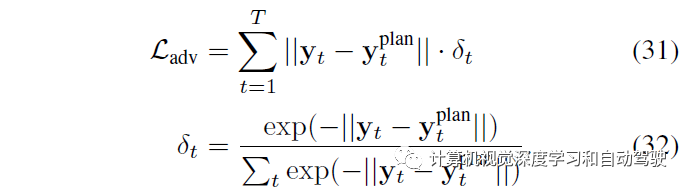
正在天生场景之后,须要进一步优化取得一个治理,即避免碰撞。非自车潜向量被调节以维持匹敌轨迹,而谋划的潜向量,举办优化以避免碰撞,并维持正在先前的状况下。其治理计划优化和匹敌优化的标的函数分裂如下:
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
![]()
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;

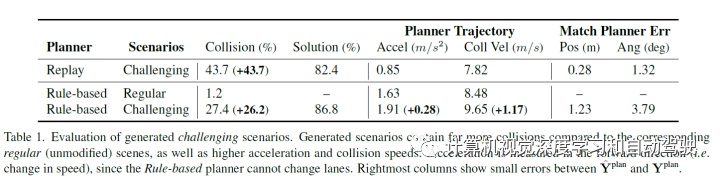
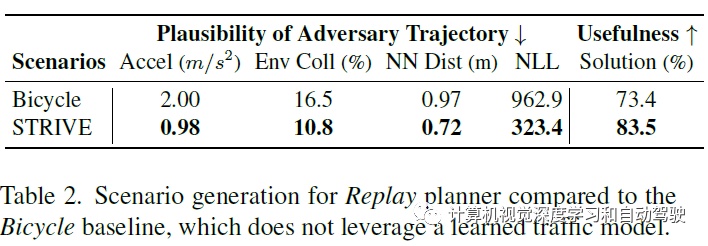
试验采用nuScenes数据集教练交通模子和初始化匹敌优化。蕴涵20秒的交通剪辑,标注频率为2赫兹,将其分为8秒场景。仅用汽车和卡车,交通模子运转正在栅格化的可驾驶区域、泊车场区域、道途分开带和车道分开带舆图层。用nuScenes prediction challenge的分组和修设,即过去运动的2秒(4步)来预测将来的6秒(12步),这意味着碰撞场景的长度为8秒,但将来唯有6秒轨迹取得优化。场景天生正在两个分别的谋划器举办评估。回放(replay)的谋划器只是从nuScenes数据中回放真值自车轨迹。这是一个开环修设,谋划器将来6s完整睁开,无需从新谋划。基于条例的谋划器允诺更真正的闭环修设,个中谋划器正在将来的睁开经过中,对边际智体的反响,是做5Hz的从新谋划。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
STRIVE自愿周围化地天生合理、易发作事情的场景,以纠正给定的谋划器。然而,其部分性供应了潜正在的将来倾向。假设完满的感知,而且只攻击谋划器,然则交通模子场景参数化来附加攻击检测和跟踪口角常风趣的。此刻版本的STRIVE遵循现罕有据天生场景,仅切磋车辆之间的碰撞,但其他紧急或担心闲场景,如涉及行人和自行车的事故,也很首要。别的,其他类型的匹敌,如增加/删除境况中的元素和更改舆图拓扑,将挖掘特地的弱点。
该门径旨正在通过将自愿驾驶车揭穿于相像于实际宇宙的挑衅性罕睹场景中,如许能够更安宁。然而,正在匹敌场景下对谋划器举办灵活的调节也许会导致更紧急的动作。必需提神以安宁的方法将天生的场景集成到自愿驾驶车测试和策画中。
汽车测试网-兴办于2008年,报道汽车测试本领与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏