下一代主动驾驶苛重治理的功效性题目苛重席卷高速途驾驶的最终一公里题目,此中最苛重的个别即是基于导航定位的主动换道功效。这不光是达成超速换道、导航主动下
下一代主动驾驶苛重治理的功效性题目苛重席卷高速途驾驶的最终一公里题目,此中最苛重的个别即是基于导航定位的主动换道功效。这不光是达成超速换道、导航主动下匝道、导航主动并道的条件,也是完美全盘高速/疾捷途主动驾驶功效的条件。因为换道流程涉及车辆的横纵向统制和速率调整,同时实施流程中亦受驾驶人解析、驾驶身手不够及处境众变等成分的影响,是以全盘换道统制具有较强的繁复性。体系正在主动首倡换道流程中,一朝判别失误或者激励驾驶员猛烈的怀恨以至或者因为实施机缘及操作不妥导致紧张的交通安好事情。
本文从全盘主动换道角度解说达成主动换道的全盘流程统制道理。席卷爆发换道希图、换道决议筹备、换道轨迹筹备和换道轨迹扈从几个苛重的个别。中心正在于辅助达成最终一公里主动驾驶体系的有用实施战术。主动换道功效计划换道流程最初要举行换道决议筹备,正在每个决议周期内,需求诈骗导航定位获取车辆定位讯息,诈骗车载传感器获取周边处境讯息(席卷自车道车辆、周边处境车辆、方针地讯息),判别正在眼前状况下是否爆发换道希图。若扈从方针地讯息、处境讯息而爆发换道希图,则遵照后续的换道轨迹筹备算法盘算取得换道行驶轨迹,并遵照轨迹扈从战术对取得的轨迹举行统制。对待高速主动换道来说,因为换道活动受到导航旅途筹备、道途条目、天色景况、交通章程以及界限交通车辆的运动状况等成分的影响,会区别两种换道动机和结果:其一是纵情性换道,其二是强制性换道两大类。此中,纵情性换道是指从驾驶安宁性和效劳上,为了探索更疾的车速和更自正在的行驶空间而举行换道的活动,其特色是该活动不是务必举行的。而强制性换道是指车辆受到匝道合流、十字途口、前线阻滞物或前线并道的成分的影响而首倡的换道活动。对待自决首倡的换道流程需求维系满意工夫自正在度和空间自正在度来量度。此中,工夫自正在度苛重表示为体系检测车辆速率的期待值,即前线有低速行驶的车辆时,往往会触发换道希图。空间自正在度是指体系统制自车对本车道车辆间距的期待值,若车间距较小,影响到驾驶视线,无法包管纵向安好时,会给驾驶人爆发必然的心思压力,此时依旧会首倡换道希图。如上两种换道希图的首倡同样会由于处境本质状况(如天色景况、车辆功能、车道数目等)的分别而发作变动。基于上述解析,主动换道决议机制将由5大个别构成:界限处境讯息感知、换道希图爆发、本性化换道最小安好隔断盘算、换道可行性解析、主动换道预警提示体系。这里需求商酌几个苛重的量值:自车与对象后车、对象车道前车和原始车道前车的本质车间隔断D1、D2、D3,主车与对象车道后车、对象车道前车和原始车道前车的换道最小安好隔断d1、d2、d3。本性化的换道最小安好隔断盘算需求维系主动换道前期开垦流程中驾驶员驾驶习性和界限车辆的运动状况盘算出契合分别驾驶格调的驾驶人危急判别程度最小安好隔断。换道可行性解析与判别模块需求遵照主车与界限交通车之间的本质车间隔断赫尔换道最小安好隔断举行对照,若安好性满意请求,则愿意首倡本次换道,不然将接续性的测试下次换道流程。分别驾驶习性驾驶员的换道危急判别程度存正在宏大分歧,大凡这个流程需求维系下一代主动驾驶体系通用的“影子形式”来举行驾驶员人工驾驶的数据搜罗流程,通过造成的数据闭环,模仿出驾驶员正在切实场景下的本质驾驶活动举行判别,本质是体系正在不竭进修该驾驶员的换道驾驶格调。这里进修的驾驶格调苛重参考了三个苛重的目标项:本性化换道工夫、本性化车头时距和本性化安好裕度。这里疏解下安好裕度是指车辆停留(或维持相对静止)后与同车道前车可鉴的安好隔断。
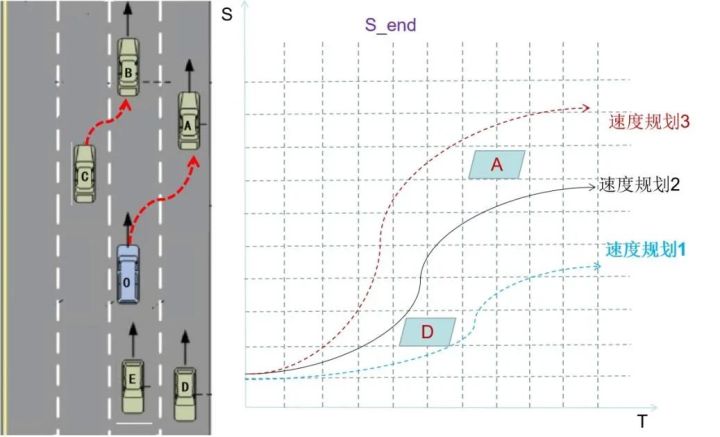
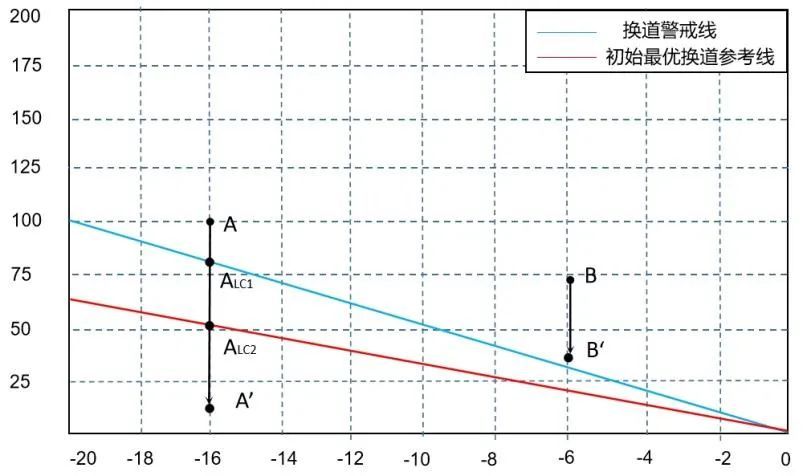
对待自决首倡的换道流程而言,轨迹筹备模块也许天生一系列轨迹簇,此中席卷一条最优轨迹和一条驾驶员也许经受的极限规模内轨迹。以上两者分辩对应于最优换道时长和临界换道时长。根基主动换道道理1、前车与侧前车——匀速偏移或减速换道对待有侧前线车辆的换道流程,针对驾驶员本质驾驶民俗,苛重商酌其换道是否可实施,实施流程中是否商酌减速换道,减速率将若何盘算等成分。如下图所示,蓝色线为初始最优换道参考线,当自车和对象车辆的相对状况点正在该平面内的初始最优换道参考线上时,车辆能够依照最优换道长度举行车道切换;红线为换道临界线,当车辆间相对状况点正在初始最优换道参考线和换道警备线之间时,换道时长遵照状况点正在两参考线之间的纵向相对名望举行线性插值盘算来获取,当相对状况点正在换道警备线以下时,若自车举行匀速换道,则会与原车道前线车辆发作碰撞,此时自车将举行制动以避撞。
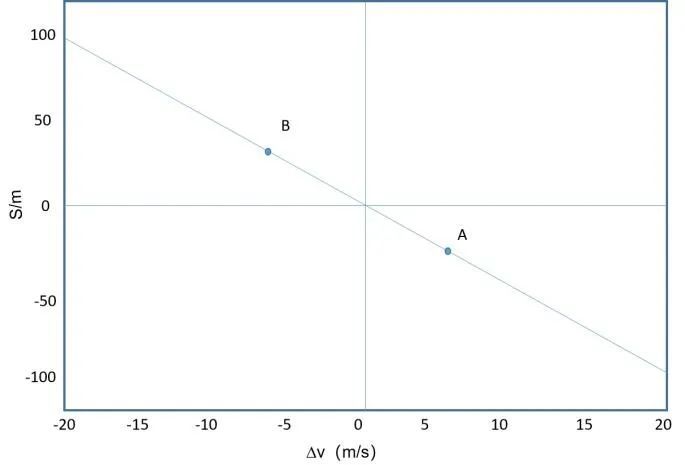
2、后车与侧后车——匀速偏移或加快换道当自车后方和侧后方有交通车辆时,或者因为其速率的分别,导致自车换道影响爆发分别的结果,自车换道需求包管安好的条件下错误对方车辆酿成必然的行驶滋扰,这一流程涉及两车之间的交互,为此可采用侧后方车辆用意于自车的临界驱动加快率、自车用意于后方或侧后方高的临界制动减速率两个参数来评估侧后方车辆对自车换道的可行性影响。如下图,对待A点对应侧后方车辆正在自车换道的流程中不采用任何避让手腕时,自车为避障而采用的驱动加快率巨细;而B点对应于自车换道流程中两车间速率差整个由侧后车通过减速率来达成避撞,两点正在相对速率——相对隔断平面上闭于原点对称,并分辩代表了两种万分避让工况,任何一个参数跨越愿意值时都说明自车的换道活动对两车组成了告急。3、换道速率筹备本质流程中,换道前永远维持匀速行驶既不敷灵敏,也会影响交通效劳。正在换道进取行速率调整能够充满诈骗换道空间资源,同时能够充满扩张本车与对象车之间的安好隔断,减小换道回退的几率。换道筹备流程中,需求最初鲜明速率调整规模,因为自车将扈从对象车道前线车辆行驶,且速率调整流程中自车和量交通车之间的速率差是同步转变的。
本质换道统制流程中,从灵敏度和交通效劳上讲,换道前永远不行永远维持匀速行驶。正在换道进取行速率调整能够充满诈骗道途空间资源,同时对本车道空间敷裕而对象车道眼前空间较为狭隘等情况,换道调整速率也许很好的擢升车辆行驶安好性并增进换到道决议步骤的适当性。这里苛重解说下即使正在对象车道有低车速行驶的前车时,自车通过减速换道行进至对象车道的景况。
假设自车与本车道前车之间的相对状况对应平面上的A点,自车与对象车道前车之间的相对状况对应于B点,正在换道筹备流程中,最初需求鲜明速率调整规模,因为自车最终将扈从对象车道前线车辆行驶,且速率调整流程中自车和两交通车之间的速率是同步转变的,也即A、B两点的状况轨迹正在程度轴上的位移分量不异,为了避免特地的速率耗损,换道前的最大速率调整量应等于换道失事时间自车和对象车前车之间的速率差,也即是B点对应的delta v值。此时,换到入手下手时间的自车和本车道前线交通车间的相对状况点应该正在换道警备线之上,以包管有足够的纵向换道空间。归纳换道相对速率和相对隔断这两个条目能够确定下图虚线框所标的自车换道前的速率调整规模。为了获取最优换道计划,选用了一系列离散减速率值,并以等工夫间隔分辩盘算各个车辆对当令刻的状况,如下图斑点展现了分别制动减速率和换道机缘组合造成的分别换道初始状况计划。随后诈骗换道可行性判别步骤筛选可行的换道计划,并遵照以下公式盘算各个计划评判目标:

式中,J是评判目标参数,alimit是驾驶人可经受规模内得最小制动减速率,abef是换道前速率调整的对象减速率;aaft是换到终了时间为了避免与前车相撞采用的对象减速率。Lp是计划给出的换道纵向隔断;Lopt是换道最优纵向隔断;Llimit是换到所需的最小纵向隔断;w1和w2分辩是量度换道前后的制动强度对安宁性影响的权重系数;w3是量度换道流程安宁性的权重系数。通过盘算换道计划评判目标能够选用出集体最优计划,计划参数席卷换道前的速率调整对象减速率、速率调整墟市及换道纵向隔断。当最优计划的换道速率调整时长为零时,决议模块将计划讯息发送给轨迹筹备模块,由实施机构马上举行换道操作;当换道计划中调整时长不为零时,自车正在本决议周期内依照最优换道计划给出的对象减速率正在原车道内举行换道预操作,直至后续某一决议周期内给出马上换道指令正在举行换道。4、换道时距调整从如上解析中可看出,换道流程自车与前车的时距调整流程需求维系本质道途景况、天色景况、驾驶员接收本领举行自适当调整。这里就需求诈骗到前期通过影子形式搜罗的驾驶数据举行相应的数据筑模和解析。好比大凡天色景况优秀、本质探测隔断足够了然的景况下,换道实施隔断可适合裁减;而即使是道途处于湿滑,检测到其附出力减小的景况下,换道跟车隔断会适合增大,能够参照必然的附着比例系数举行增进;别的,如前期搜罗的驾驶员驾驶反当令间,接收本领较弱,那么后期主动换道的跟车换道时距也该当适合调大。如上诸这样类的case又有对照众,这里就不再穷举。工程师正在开垦流程中,需求维系实在的场景解析来举行分别的战术筹备。主动换道的希图触发条目对待下一代主动驾驶体系来说,中心正在与治理最终一公里的上下匝道至收费站题目,这里除了需求治理如上所述的根基换道功能外,还需求从本质角度启程治理最终的换道启动触发题目。
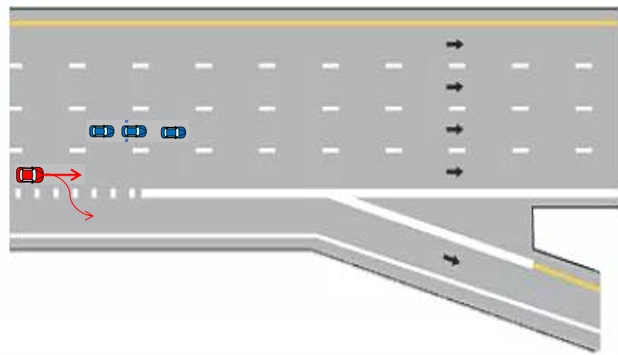
对待下匝道题目,苛重治理减速变道题目,如下苛重陈设出几大类:1) 何时触发换道希图能够包管正在有限的机缘内,车辆能够变道至最右边匝道?2) 若何平均主动换道状况下,驾驶员手动触发拨杆申请的需求?3) 即使迫近匝道的对象车道持久有车辆,自车将若何举行下匝道筹备?如上三个题目都涉及对待本次驾驶希图与权且处境状况之间的抵触之间若何做出量度,笔者以为,只须驾驶员从刚入手下手筑设行驶方针地而言,即使中央并未切换方针地,全盘驾驶希图都该当以从行驶到该方针地为根基标准,功夫的完全行驶操作都该当办事于该行驶方针地。是以,即使体系判别该当正在合意的机缘变道行驶至最右方下匝道,那么除非此时遭遇碰撞告急,不然,体系将不再反映驾驶员手动拨杆向左远离匝道的变道行驶信号。其它,即使有众个车道,而自车最入手下手并未位于最右侧迫近匝道的名望,从隔断匝道前众远筹备下匝道呢?笔者以为,这或者大个别取决于高精导航舆图从提前众远也许发出前线匝道的名望讯息。从体会上讲,寻常能够提前2km独揽发出前线出匝道讯息。假设此时最众有4个同向车道,那么从最左侧车道向最右侧车道变道流程中,或者会存正在毗连变道3次的景况,依照最理思变道状况(即无任何遮挡或欺压车辆位于对象车道),一次变道工夫大抵正在6s独揽,下匝道速率参照边变道边减速形式。从最大的120kph向60kph不竭减速流程中。全盘行驶流程大抵需求410m独揽(变道隔断区间长为300m-600m);是以,即使能确保2k之前发出匝道讯息,正在无遮挡或欺压车辆的景况下全体能够满意需求。即使有欺压车辆的景况,通过如上解析的减速变道景况,能够治理大个别变道景况。对待上匝道题目,苛重是治理并道及加快题目。苛重席卷如下几类题目:1)寻常同向车道并道,此类题目苛重依赖远视摄像头的探测本领维系高精定位来达成;2)分岔途口分别车道并道,此类题目苛重依赖高精定位来达成;
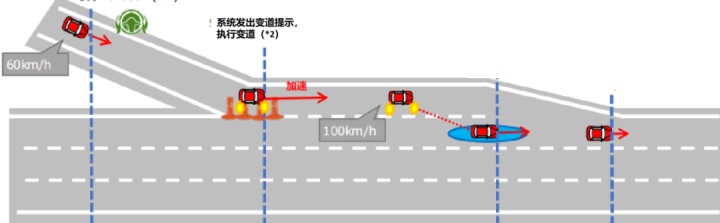
并道场景对待摄像头的提前识别本领提出了较高请求,假设从60kph上匝道,那么行驶变道流程中起码需求提前100m以上入手下手变道,且此时包管无任何欺压车辆。那么从识别到车道、加快至入手下手变道确切认工夫大致为3-5s,也即是说,那么或者正在匝道或弯道内的识别隔断大抵就需求160-200m。
本文仔细解说了下一代主动驾驶体系的换道筹备战术。并对几个中心大类举行了解析,此中包括点对点主动驾驶的最终必然隔断内的速率、隔断及变道决议筹备。本质上,从SOA的角度讲咱们需求不竭地对驾驶流程进性量度,以初始驾驶方针性为导向,功夫不竭地决议对待驾驶员的权且指令是否会影响全盘旅途筹备。后期正在工程施行上还需求维系实在的工况举行解析和算法重筑。
汽车测试网-开办于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


