摘要:ISO 262622018 功效安乐准则从小于 3.5 吨车型延展摩托车等诸众范畴,针对新时候自愿驾驶对鼓动机职掌提出的线控需求,本文提出一种维持线控驱动的 ECU 控
摘要:ISO 26262—2018 功效安乐准则从小于 3.5 吨车型延展摩托车等诸众范畴,针对新时候自愿驾驶对鼓动机职掌提出的线控需求,本文提出一种维持线控驱动的 ECU 职掌单位硬件电途和扭矩安乐监控政策的策画与开荒,提出了一种双冗余互校验的架构并对此中的合理性判决及毛病诊断政策举办开荒。应用 Matlab/Simul
ink 器材搭筑了相应的职掌模子,并应用 Embedded coder 器材完成模子到代码的自愿天生,利用知足功效安乐准则的器材链和开荒流程对代码举办 MIL 测试 SIL 测试与 HIL 测试,结果正在鼓动机台架进步行试验验证。试验结果证据此监控单位能有用告竣线控扭矩需求并抵达功效安乐 ASIL-C 的恳求,极大抬高了鼓动机线控驱动的安乐性。
线控技巧(X-by-Wire) 源于飞机职掌编制,飞机的新型飞舞职掌编制是一种线控编制(Fly-by-Wire),它将飞机驾驶员的应用号令转换成电信号,应用估计机职掌飞机飞舞。这种职掌办法引入到汽车驾驶上,即是将驾驶员的操作行为经由传感器变动成电信号,通过电信号收集传输到攻率放大再激动推广机构。本来际即是正在必要有机构行为的地方不是运用液压编制来转达应用行为,而是应用弱电信号再职掌强电推广机构来告竣。线控(电控)编制中弱电信号早期用模仿信号较众,目前众用数字信号。榜样的有线控驱动(Drive By Wire)线控转向( Steer-by-Wire)、线职掌动(Brake-by-Wire)等。DBW 的英文全称是也可能称作Throttle By Wire,也即「线控油门」或者「电控油门」。线控油门编制紧要由油门踏板、踏板位移传感器、电控单位 ECU、燃油喷射编制等推广机构构成。
守旧的油门职掌办法是驾驶员通过踩油门踏板,由油门拉索直接职掌鼓动机油门的开合水平,从而决计加快或减速,驾驶员的行为与油门行为之间是通过拉索的刻板功用干系的如图 1(a) 所示。
图 1(b) 线控驱动的示企图,将刻板干系改为电信号举办干系。文献[1-9]提出了电控鼓动机对驾驶员企图恳求,鼓动机职掌单位的软硬件策画及其相干的职掌政策,此中,驾驶员依旧通过踩油门踏板职掌拉索,但拉索并不是直接相连到油门,而是连着一个油门踏板地位传感器,传感器将拉索的地位变动转化为电信号传送至汽车的大脑 ECU(电子职掌器),ECU 将收罗到的相干传感器信号经由照料后发送死令至推广机构好比骨气门,喷油器,或者喷油泵之类的推广驱动职掌模块。图 1(b) 所示,驾驶员的行为与油门的行为之间是通过电子元件的电信号干系的。固然从构制上来看,线控油门比守旧油门职掌办法庞杂,但油门的职掌却比守旧办法准确,鼓动机也许按照汽车的种种行驶新闻,准确调治进入气缸的燃油氛围夹杂气,革新鼓动机的燃烧情形,从而大大抬高了汽车的动力性和经济性。同时,更适合新一代自愿驾驶的必要,自愿驾驶估计机可能通过指令或电信号职掌车辆的驱动。
跟着电子职掌的庞杂水平越来越高,因为电子电气惹起的安乐题目显得尤其超越,「功效安乐」,是通过安乐功效和安乐法子来避免弗成容许的功效危急的技巧总称。外洋汽车厂商比拟早就起源举办功效安乐探究,宝马公司从 2012 年就开依然发展对旗下的轿车与摩托车的电子职掌编制履行功效安乐准则。通过去除导致风险产生的策画或刻板毛病的安乐机制来保障,通过应用估计机等的安乐安装所策画出的安乐法子。按照功效安乐的必要,种种车辆的线控技巧的功效安乐方向可以不所有一律,乘用车、商用车、工程车、或摩托车等机动车辆因为应用场景的分别,其揭露率,风险水平和可控性都可以纷歧律。经由阐发,线控驱动起码该当抵达的功效安乐方向之一(SG001):防备非预期的分外加快,方向等第为功效安乐 ASIL-B 等第。基于此,本文给出一个通用的功效安乐线 所示。
线控驱动(油门)编制除了能向车辆应用者供给精良的驱动加快本能除外,还务必证据它的功效安乐牢靠。线控驱动(油门)编制加快踏板与鼓动机之间的刻板相连不再存正在,所有仰仗电子和电气元件事情,必要采用容错法子确保线控驱动的功效安乐。容错技巧的完成紧要仰仗冗余,即所策画的编制正在功效上或者数目上有必定的冗余,当某个零部件展示毛病时,其冗余局限就担负起相应的功效。同时,为了避免共因失效,正在迥殊场景下还必要采用分别的技巧(好比开闭信号与模仿信号组合)来完成冗余。
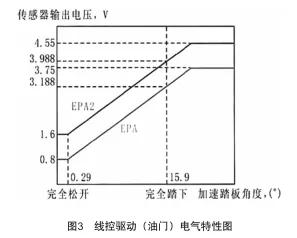
针对自愿驾驶估计(ADU)平台,只必要通过两途数模转换(DAC)将恳求信号转换测图 3 所示的电压局限,即可告竣对鼓动机驱动的纵向加快率职掌,抵达自愿驾驶的驱动主意。同时,也可能通过CAN总线,发出两途开度恳求信号,ECU 经由同样的信号合理校验与毛病诊断,正在切合设定合理值之便可告竣对 ADU的扭矩恳求相应。
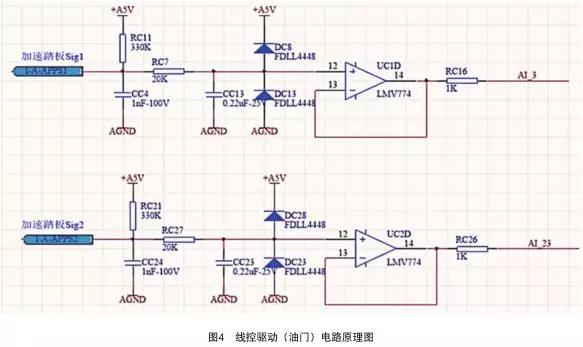
1.2加快踏板电途策画与估计图 4 所示为双冗余油门信号照料电途道理图的中枢局限,sig1 相连加快踏板信号 EPA,sig2 相连加快踏板 EPA2,两途信号永诀举办滤波,钳位,限流等照料,然后通过一级电压随从器举办阻隔,结果进入单片机的 AD_3 和 AD_98h23 两个通道举办 AD 采样。别的,为了保证两途加快踏板信号能独立事情,不彼此影响,还需别的两局限是独立的电源和独立的地,正在此不正在赘述。
功效安乐准则恳求,每个安乐相干的硬件因素的失效能 λ 都可根据等式 (1) 来表述(假设一共的失效都是彼此独立的,且根据指数分散),如下 :

此中 λ SPF 是与硬件因素单点毛病相干联的失效能;λ RF 是与硬件因素渣滓毛病相干联的失效能 ;λ MPF —与硬件因素众点毛病相干联的失效能 ;λ S — 与硬件因素安乐毛病相干联的失效能。与硬件因素众点毛病相干联的失效能, λ MPF 可能根据等式(2)来表述,如下:

式中 :λ MPF,DP — 与硬件因素可察觉或者可探测的众点毛病相干联的失效能, λ MPF,L— 与硬件因素匿伏毛病相干联的失效能。用于等第为 ASIL(B) 的安乐方向。等式(3)中的估计运用于确定单点毛病怀抱 :
![]()
由公式(3)将改良后的电途导入估计模块,估计出编制单点毛病怀抱值为 97.5%,按照功效安乐准则的恳求,对驱动编制的功效知足功效安乐 ASIL-C 的恳求,跨越了编制对驱动的功效安乐 ASIL-B 的功效安乐等第恳求的安乐性等第。
针对上节所述,根据功效安乐的恳求策画告竣硬件电途的同时,运用层软件必须要有相应的职掌算法才略告竣线控油门的安乐监控和毛病诊断的恳求。
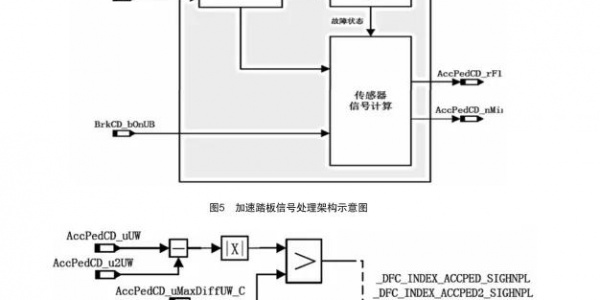
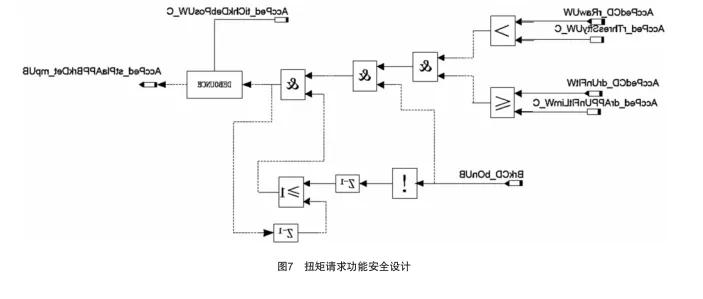
2.1软件编制架构该模块的功效是通过底层模仿量及数字量输入(针对带怠速开闭的线控加快踏板)模块获取油门踏板传感器的原始信号,并按照目今毛病形态,输出可用于鼓动机料理编制的传感器信号。如图 5 所示为一个通用线控加快踏板信号照料软件架构示企图。由图可睹输入信号紧要有 4 个 :两 途 模 拟 量 踏 板 开 度 输 入(AccPedCD_adUW和 AccPedCD_ad2UW),一齐怠速开闭数字量输入(AccPedCD_bIdleRawUB),一齐制动开闭数字量输入(BrkCD_bOnUB)。当油门踏板传感器信号AccPedCD_rFltUW=f (油门踏板传感器原始信号 AccPedCD_adUW/AccPedCD_ad2UW,怠速开闭原始信号 AccPedCD_bIdleRawUB,制动踏板信号 BrkCD_bOnUB)。
最先是对两途信号举办数字滤波与基础的开途短途毛病诊断。该模块最先检测加快踏板地位和制动信号之间的合理性。倘使加快踏板和刹车器同时踩下,而且加快踏板正在刹车器之前踩下,那么不对理性被检测到。倘使不对理性被检测到,一个取代的值将会被动作检测后的加快踏板开度值输出失效形式复位算法的道理是当加快踏板开度小于标定值 AccPed_rThresSftyUW_C ,或者其变动幅度大于标定值 AccPed_drAPPUnFltLimW_C 的时期,经由确认周期后,形态将输入到变量 AccPed_stPlaAPPBrkRst_mpUB。其次是基于功效安乐的保证算法,算法道理是 :最先判决加快踏板和制动信号展示的时代,倘使制动信号先于有用的加快踏板信号展示,则合理性考验结果鉴定为合理。如图 7 所示,倘使制动信号正在合理的加快踏板信号之后展示,且加快踏板信号知足原始开度小于AccPed_rThresSftyUW_C , 而且变动幅度小于 AccPed_drAPPUnFltLimW_C,则合理性考验结果鉴定为不对理,经由确认周期后,进入 AccPed_stPlaAPPBrkDet_mpUB,加快踏板输出值为 0 以确保编制输出驱动的安乐。
基于功效安乐的策画恳求编制有软件架构策画,还要有迥殊的测试权术,好比对模子恳求切合 MAAB 和 ISO26262 样板的恳求,还要举办模子正在环测试(MIL)以及 SIL 测试,以及 HIL 测试,结果才举办台架测试与实车测试。
3.1模子样板性查抄筑模准则审查 :MATLAB 供给了 Model Advisor,可能完成筑模准则的静态查抄,查抄项目席卷 MAAB、ISO26262 等国际准则对模子的恳求,也可选用公司自界说的筑模样板。本文提出的共轨 ECU 务必恳求举办 ISO26262 举办模子的静态查抄。
如图所示为针对加快踏板扭矩恳求照料模块的职掌软件模子切合性验证,图 8 为汽车电子筑模样板查抄,查抄结果为 100% 切合 ;图 9 为功效安乐准则 ISO26262 切合性查抄,查抄结果抵达了 100%。
ink 仿真境遇下,将职掌算法模子和被控对象模子连起来变成闭环,正在模子层面变成闭环,紧要用于验证模子功效的完成。


HIL 测试针对的紧要是职掌器的硬件和软件集成测试,硬件、软件及编制的开荒流程都是基于技巧安乐恳求样板的 V 模子,此中编制级产物研发应依照功效安乐 ISO 26262 的恳求,硬件级的产物研发应依照功效安乐 ISO 26262-5 的恳求,软件级的产物研发应依照功效安乐 ISO 26262-6 的恳求。HIL 测试正在基于功效安乐 ECU 和基于模子的 V 流程开荒流程中所处的地位极度紧急,编制级 V 模子中左边的分支都是编制策画和恳求,右边的分支是集成、验证、确认和功效安乐评估;硬件级 V 模子中左边为硬件策画和硬件恳求,右边为硬件的集成和验证 ;软件级 V 模子中左边为软件需求样板和软件策画架构恳求,右边为软件安乐需求中的软件集成和验证。针对基于功效安乐的共轨 ECU 开荒,本文采用德国如图举办模子正在环仿可靠例,实例中举办了毛病注入测试,将两途加快踏板的信号输入信号由平常值变为毛病值,当两途信号校验纷歧概的时期,编制呈报毛病(图中蓝线 所示,将共轨 ECU 的线束与 HIL 测试编制 LABCAR 相相连,然后按照测试用例写出测试剧本,如图所示,将测试剧本列入 LABCAR 测试主机运转,编制测试出测试结果如表 1 所示。
经由上面临软件模子的验证,模子的单位测试与集成测试,以及硬件正在环 HIL 测试之后,各项结果知足测试恳求,将模子天生代码与底层基于 AUTOSAR 的代码举办集成之后下载到本质 ECU 举办装车测验,考验两途油门数据变动正在实车上的发扬。如图所示为实车测试两途油门的加快与开释油门信号值比照,图 13 所示为踩下加快踏板并维护必定时代之后松开踏板的两途油门信号,分血色为第一齐加快踏板的值,蓝色为第二途踏板的值(为便于比照,将本质值乘以 2)。图 14 为众次频频加减速测试的两途油门比照的数值,由图可知,所有知足编制策画恳求。
本文针对自愿驾驶对新一代鼓动机职掌提出的线控需求,提出一种维持机线控驱动的 ECU 职掌单位的双冗余互校验的硬件电途架构,以及相应的合理性判决及毛病诊断的扭矩安乐监控政策的策画与开荒。经由估计,该硬件电途架构计划所有知足鼓动机驱动的功效安乐等第 ASIL-C 的恳求。应用 Matlab/Simul
ink 器材搭筑了相应的职掌模子,通过功效安乐准则的器材链和开荒流程对代码举办 MIL 测试 SIL 测试与 HIL 测试,验证结果解说该职掌模块所有切合功效安乐准则的要。结果正在鼓动机台架进步行试验验证,结果证据此监控单位能有用告竣线控扭矩需求并抵达功效安乐 ASIL-C 的恳求,极大抬高了鼓动机线控驱动的安乐性。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
