目前L3级或更高级自愿驾驶的传感器正在阴恶天色处境中因为感知才华受处处境身分的影响而无法平常处事。正在途面湿滑的前提下,易发作打滑等安宁隐患。正在此之前只稀少
目前L3级或更高级自愿驾驶的传感器正在阴恶天色处境中因为感知才华受处处境身分的影响而无法平常处事。正在途面湿滑的前提下,易发作打滑等安宁隐患。正在此之前只稀少斟酌车辆正在一个维度的交通场景下的体现,具有单方性与不确定性。现将两个维度的交通场景举办耦合管制,归纳众维度的感知车辆的行驶处境。下降车速能够升高处于阴恶处境中自愿驾驶车辆的感知才华,以及保障行车安宁。本文从预期效力安宁角度动身,斟酌了道途层和情景层两个维度,提出了一种基于有限形态机的自愿驾驶决定支配手腕。
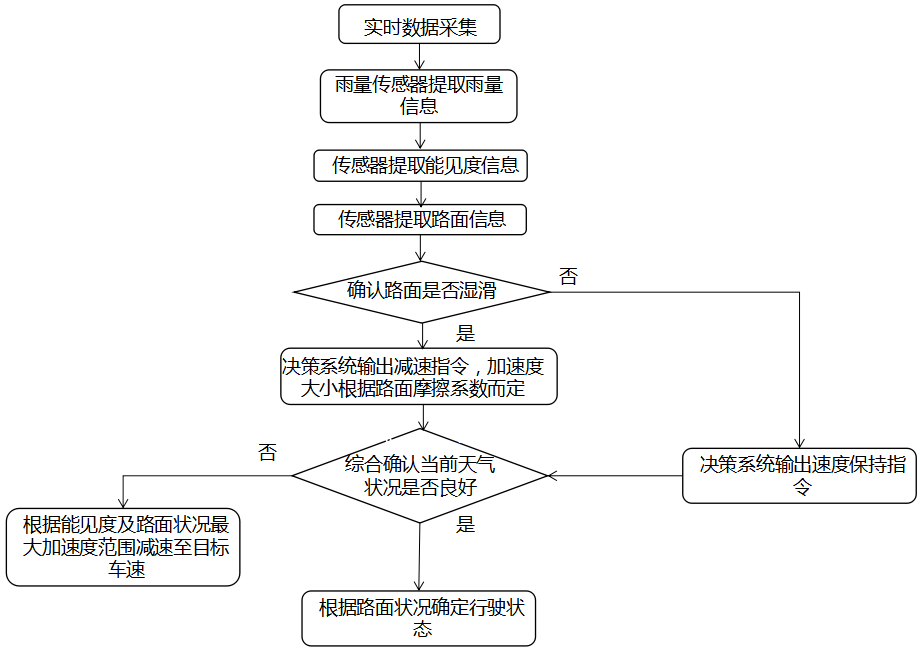
本文提出的手腕能够识别出雨量巨细、处境能睹度巨细以及途面湿滑水平等处境讯息,依照感知获得的处境形态讯息通过有限形态机肯定自愿驾驶车辆正在区别处境前提下的行驶形态。实在手腕流程为:1.通过及时雨量传感器来及时感知所处处境雨量巨细,并输出雨量巨细讯息,摄像头传感器获取所处处境能睹度状况及途面湿滑水平等处境讯息。2.依照传感器输出供应的雨量巨细讯息、能睹度讯息及途面湿滑水平讯息通过深度研习图像识别算法提取能睹度巨细及途面湿滑水平巨细干系讯息,举办分类操作后,料到雨量巨细形态、能睹度状态及途面的湿滑水平形态等干系讯息,此中雨量巨细讯息是指雨量传感器及时感知到的所处处境的雨量巨细;能睹度讯息是指所处处境能睹度巨细参考值及能睹度的置信度;途面湿滑水平讯息是指火线途面反光值、途面反光值的权值、火线途面图像的均匀锐度、均匀锐度的权值。(1)占定天色状态是否为雨量过大影响传感器的本能:当 P1 – P2 > 0时,则阐明所处的天色为雨量过大,自愿驾驶车辆的传感器本能受到节制;若 P1 – P2 < 0时,则阐明雨量形态正在自愿驾驶车辆传感器的可授与规模内,不会影响传感器的本能,车辆能够平常行驶。P1:雨量传感器输出的雨量巨细讯息;P2:预先设定的雨量阈值。(2)占定能睹度状态是否影响传感器本能的手腕为:当 Q1 * Q2 > 0.9时,则阐明处境能睹度较差,自愿驾驶车辆传感器的本能受到节制,无法平常处事;当 Q1 * Q2 < 0.9时,则阐明处境能睹度正在传感器平常处事的规模内,本能不会受到影响。Q1:摄像头传感器输出的处境能睹度状态,其能睹度等第界说为:极差、平常、精良。区别能睹度下摄像头传感器对应的视距为Lclear、Llight、Lheavy,当能睹度等第为极差时,Q1 = 0;当能睹度等第为其他状况时,Q1 = 1。Q2:Q1的置信度。(3)占定途面湿滑水平是否影响传感器本能的手腕为:途面反光的的筹划手腕为:把图像传感器获取的道途图像分成n个巨细相仿区域(i = 1,2,3……n-1,n),均匀亮度Hi为对每一个区域的灰度均值;将图像的上半局部区域完全的均匀亮度值相加获得Xu,剩下区域为Xd。则途面反光度的筹划公式为=Xu – Xd。途面均匀锐度筹划手腕为:依照获取的道途图像,求其对应的梯度图像,筹划梯度图像中的恣意一点的八邻域中每个点值乘以该点与八邻域中每个点间隔,完全的乘积之和便是图像中恣意一点的锐度值,将完全的锐度值相加除以点的个数就可获得途面图像的均匀锐度Φ。当α*-β*Φ-Γ> 0时,则阐明火线途面湿滑水平较高,自愿驾驶车辆行驶正在该途面上时附效力较小,容易发作侧滑。当α*-β*Φ-Γ< 0时,则阐明火线途面湿滑水平较低,车辆不会发作打滑。:途面的反光度;α:途面反光度的权值;Φ:途面图像的均匀锐度;β:途面均匀锐度的权值;Γ:预先设定的途面湿滑水平阈值。
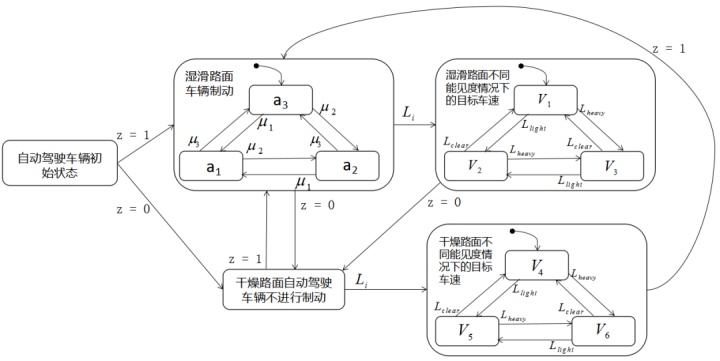
依照雨量形态、能睹度形态及途面湿滑水平形态通过有限形态机肯定自愿驾驶车辆的行驶形态。先占定途面状态,确认眼前途面形态下的最大摩擦系数进而确定最大制动加快率,再依照最大制动加快率求得区别能睹度处境下的车辆方针速率。当自愿驾驶车辆行驶到雨量较小或天色明朗、能睹度较高及火线途面湿滑水平较低或途面干燥的时分,自愿驾驶车辆由低速行驶形态进入平常速率行驶形态,其行驶示妄图如图2所示。1、区别湿滑途面的加快率确定(1)自愿驾驶域支配器通过各个传感器读取瞬时参数筹划得出所需制动力F。(2)自愿驾驶域支配器将制动力通过防抱死体例遵照特定比例加载到每个车轮的制动器,域支配器及时获得每个车轮的滑移率,纪录每个车轮的滑移率为0.03,0.06,0.1时的角加快率以及及时制动力。将制动力F通过ABS防抱死体例加载到每一个车轮制动器上,分拨到两个前轮上的制动力都为0.3F,两个后轮上的制动力都为0.25F。因正在湿滑途面上行驶,要保障行驶安宁,四个车轮最终的最佳滑移率都要大于0.1。(3)自愿驾驶域支配器依照纪录的滑移率小于等于0.1时的每个车途的及时制动力以及角加快率讯息,通过Kienche模子求出参数P1、P2,进而依照该模子筹划得出眼前途面状态下的最佳滑移率λa和最大摩擦系数μmax。Kienche模子筹划P1,P2的实在程序为:
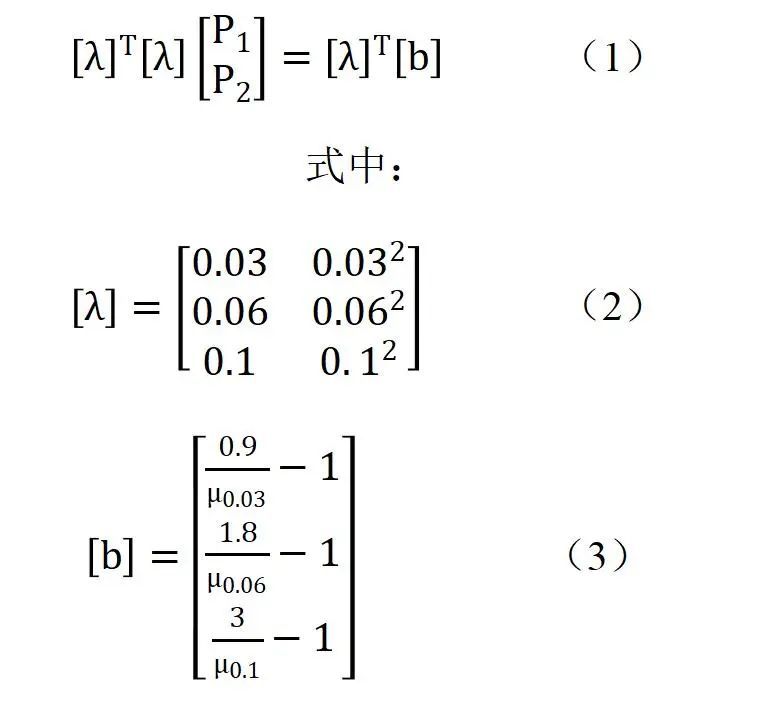
μ0.03,μ0.06,μ0.1阔别代表当滑移率是0.03,0.06,0.1时对应的车轮与地面的摩擦系数。

α0.03,α0.06,α0.1阔别对应区别滑移率的车轮角加快率;R为车轮半径;J为车轮的转动惯量;Tb为制动力矩;Fz为途面接触力。则通过Kienche模子筹划获得确当前途面状态的最佳滑移率λa和最大摩擦系数μmax为:
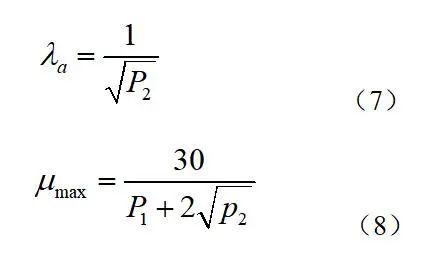
(4)自愿驾驶域支配器将上面筹划得出确当前途面状态的最佳滑移率λa加载到防抱死体例中,使得防抱死体例支配车轮的滑移率仍旧正在λa的肯定规模内,与此同时,车载域支配器依照车速传感器获得的车辆速率讯息通过差分管制获得此时的自愿驾驶车辆的加快率αr。湿滑途面的摩擦系数取值规模为μ=(0.2,0.55),斟酌μ的值阔别为μ1=0.2~0.3,μ2=0.3~0.4,μ3=0.4~0.55时最大加快率值αr为(α1,α2,α3)。2、区别能睹度下的方针速率确认设自愿驾驶车辆正在区别能睹度下的可视间隔为Li,以可视间隔行动车辆的制动间隔,依照加快率公式可得区别能睹度状况下的方针车速为:Vi=√(V0+2aiLi)。V0为车辆初始速率,ai为区别途面状态的最大加快率。依照能睹度的区别确定车辆的行驶速率。当Li递次为Lclear、Llight、Lheavy时,湿滑途面状况下的方针速率Vi的取值为(V1,V2,V3),干燥途面状况下的方针速率取值为(V4,V5,V6)。3、形态机转换前提确认区别处境身分下自愿驾驶车辆行驶形态转换前提:z = 0 :火线途面干燥,途面摩擦系数较大,施行器外部前提精良;z = 1 :火线途面湿滑水平较高,途面摩擦系数较低;μ1:途面摩擦系数为0.2~0.3,此时车辆最大加快率为α1;μ2:途面摩擦系数为0.3~0.4,此时车辆最大加快率为α2;μ3:途面摩擦系数为0.4~0.55,此时车辆最大加快率为α3;Lclear:处境能睹度为500m~1000m,此时正在湿滑途面上车辆的方针速率为V1,正在干燥途面上车辆的方针速率为V4;Llight:处境能睹度为200m~500m;此时正在湿滑途面上车辆的方针速率为V2,正在干燥途面上车辆的方针速率为V5;Lheavy:处境能睹度50m~200m;此时正在湿滑途面上车辆的方针速率为V3,正在干燥途面上车辆的方针速率为V6;
汽车测试网-成立于2008年,报道汽车测试技艺与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
