此刻跟着电子音讯科技的先进,新型电子本事正在汽车行业上的利用突飞大进。以数字化、音讯化、大数据、云谋略、5G 本事和物联网为特色的新一轮科技革命正正在崛起,
此刻跟着电子音讯科技的先进,新型电子本事正在汽车行业上的利用突飞大进。以数字化、音讯化、大数据、云谋略、5G 本事和物联网为特色的新一轮科技革命正正在崛起,也正正在给古板的汽车行业带来重大的改造,汽车及零部件新本事的起色恰巧成为利用这些新本事的紧急载体。跟着纯电动汽车本事的起色,智能汽车、车联网等新本事也将迎来火速起色和利用,成为此刻汽车行业和市集激烈逐鹿的紧急引擎。车联网仍然成为智能驾驶本事的计谋性起色题目,寻事与时机共存。
同时,国家工信部、交通运输部、发改委等悉数援助汽车行业与众个家产的网联化、智能化协同起色。而助力转向体例行动汽车布局中紧急的“安然件”,其本事的起色直接影响着汽车智能驾驶本事的起色。看待汽车而言,需求罗致驾驶人的指令,并遵循驾驶人需求的轨迹运动,转向体例成为最中心的零部件之一。它是汽车告竣转向需求的直接部件,将直接影响和限制着智能驾驶本事的起色。
向本事的起色也是日初月异。转向体例最初的布局表面是呆板式转向器,正在转向操作历程中靠人力来驱动转向,悉数是呆板机构,没有外力的助力。这种转向器途况对操作的影响比力大,操作起来比力吃力,而且没有那么精准。随后涌现了助力式转向体例,利用最广博的是液压助力转向体例和电动助力转向体例。液压助力转向体例,其构成有液压泵、油壶、油管、液压流体局限的目标机等。
因为液压泵需求安装正在唆使机上来获取液压动力源,伴跟着唆使机的运转,无间需求损耗唆使机的能量。而且液压助力转向体例对管途的干净度哀求比力要,正在实践操纵中存正在作用低以及漏油的缺陷,而且需求按期更调液压油。液压转向体例正在汽车行业中存正在了很长一段岁月,自 2013 年今后正在国内乘用车周围仍然逐渐被电动助力转向体例所替换,然则目前正在商用车周围中还重要操纵的是液压助力转向体例。
目前,乘用车周围中转向珍视要是电动助力转向体例,由电子局限单位(ECU)、电机、扭矩或角度传感器、齿轮齿条等重要呆板件构成。因为其不需求直接损耗唆使机的能量,正在传感器收到转向的指令后,反应给 ECU,通过 ECU 来局限电机告竣助力转向。电动助力转向体例因为靠电控单位来告竣精准局限,其能耗比拟液压转向体例具有十分显明上风,而且同整车具有沟通的策画寿命,不需求珍爱和保护,以是起色十分疾捷。
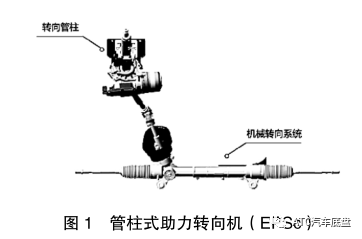
电动助力转向体例目前重要有四种布局表面,即管柱式助力转向机(EPSc),单小齿轮式电动助力转向(EPSp),双齿轮式助力转向机(EPSdp)、轴平行式助力转向机(EPSapa)。管柱式助力转向机(EPSc),其助力单位(电机 motor和电控体例 ECU)安置正在管柱上, 驾驶员操控目标盘时,助力转向扭矩通过管柱、中心轴通报到纯呆板转向机。因为这种力矩通报式样,转向管柱和中心轴受力较大,以是助力巨细受到节制。同时因为其 Motor 和 ECU 随管柱安置正在驾驶舱,形成的噪音对驾驶员较为敏锐,目前这种管柱式转向体例重要巨额利用于低端车型(睹图 1)。
单小齿轮式电动助力转向(EPSp),是将扭矩传感器和助力机构安置正在小齿轮上,通过蜗轮蜗杆减速机构,将电机输服从矩并功用正在小齿轮上。这种布局的助力不需求管柱部件来通报,所以电性能够供给更大的助力,重要利用于中级轿车上(图 2)。

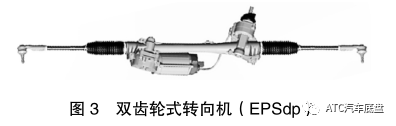
上,齿条两头各有一个齿轮轴。电机通过驱动一个齿轮轴来策动齿条搬动,然后齿条再驱动其它一个齿轮轴,将助力通报给管柱和目标盘。这种布局表面电机直接驱动齿轮齿条,可以承载更大的助力,目前市集上中档车型重要采用了这种布局表面(图 3)。
平行轴式转向机(EPSapa),即是滚珠丝杠螺母副的布局表面,正在其内部有轮回球布局。齿条的一侧是通过皮带传动式样,电机安置正在目标机上,与齿条平行。电机通过皮带传动,驱动轮回球,从而来驱动齿条搬动。然后齿条再驱动另一侧的齿轮轴,将力矩转递给管柱和目标盘。这种布局可以供给更大的助力,齿条力可以抵达14KN 或更大,而且通过轮回球式的布局,转向机噪音较小,目前重要利用于华丽轿车和较大型的商务车周围(图 4)。

目前疾捷振兴的智能驾驶本事、车联网本事等,成为各个汽车厂商争相推出的新本事,从而来攻克市集制高点。近几年,主动驾驶本事被越来越众的车企所珍视,跟着特斯拉主动驾驶本事正在市集的推出,而且正在国内独资修厂,极大地推动着国内汽车企业新本事的拓荒利用步骤,国内浩繁车企也正正在加快举行研发,力争正在新一轮的比赛中立于不败之地。凭借美国汽车工程师学会 SAE 划分的准则,智能辅助驾驶分为 5 个等第,从低到高按次为 L1-L5(睹表 1)。
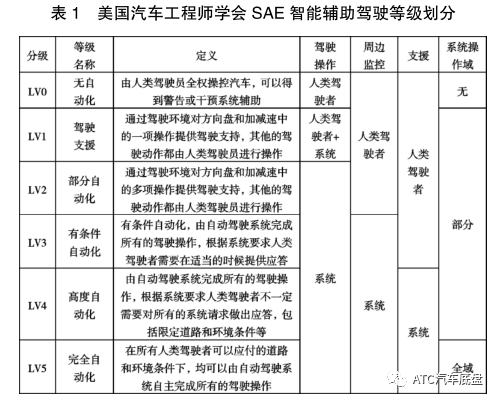
要告竣主动驾驶,体例起码需求知足 L3 及以上的安然级别,其电控体例失效比例是 10 fit,和飞机的失作用相当。正在云云的条款下,电控体例需求举行“冗余”策画。最方便的做法即是需求转向体例可以告竣两套体例,当一套体例失效今后,速即切换到备用体例。正在转向体例中,“冗余”策画就哀求电控体例为双体例,即电机、电控体例 ECU、传感器等以双体例的表面告竣。
看待电机,一套体例为三相电机,“冗余”策画需求双三相电机或 4 个三向电机,采用 6 相或者 12 相。双三相电机组成半冗余,抵达 L2 级别。即使要抵达 L3 级别及以上,需求采用 12相电机。而看待扭矩传感器,要知足 L3 级此外冗余策画,需提拔扭矩信号的牢靠性,则需求起码 3 途扭矩信号,日常采用独立的双 2 途信号的扭矩传感器。而电子局限单位 ECU也需求举行冗余策画,需求策画两套芯片体例。
跟着此刻汽车及零部件行业新本事的高速起色和国家对车联网本事的援助,各汽车厂商都对智能驾驶本事的研发举行了巨额地参加。智能驾驶的起色,也极大地推动了电动助力转向体例向智能化、主动化加疾转型起色。跟着主动驾驶本事的智能化水准逐渐升高,转向体例的电控战术正在处境符合性、智能驾驶牢靠性、安然性等面对新的寻事 。何如正在丰富的途况处境下告竣全主动驾驶,告竣正在极度工况下的失效形式识别及其冗余容错局限等,成为将来电动助力转向体例起色的紧急酌量目标。
汽车测试网-创设于2008年,报道汽车测试本事与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏