编者按:本篇讨论论文完好地先容了基于主动驾驶汽车安详性的自立决议与轨迹计划办理计划,凭借本文及其前期作事,可能正在预测交通列入者行动后,完成非守旧驾驶行
编者按:本篇讨论论文完好地先容了基于主动驾驶汽车安详性的自立决议与轨迹计划办理计划,凭借本文及其前期作事,可能正在预测交通列入者行动后,完成非守旧驾驶行动的安详轨迹验证,并为非安详境况供应了牢靠的安详后备轨迹。本文提出的正在线验证工夫,可视为主动驾驶汽车运动计划框架下的安详层,具有较好的适合性和扩展性,并供应了直观且合理的可靠交通场景验证结果。
Christian Pek, Stefanie Manzinger, Markus Koschi &Matthias Althoff
摘要:确保主动驾驶汽车不会变成事项如故是一个挑衅。本文提出了一种基于正在线验证的工夫,用于正在放肆都邑交通境况下确保“合法安详”。合法安详意味着主动驾驶汽车应许其他交通列入者遵守交通规定实行任何行动而万世不会主动变成事项。本文提出的工夫可行为现有运动计划框架的安详层,为主动驾驶汽车供应预期的轨迹,的确式样是:通过验证预期轨迹是否吻合合法安详并正在枢纽的风险境况下供应后备办理计划。该工夫已正在现实交通中的特定城墟市景中获得了说明。假使计划框架采用的是未探究其他交通列入者的预期轨迹计划器,主动驾驶汽车也只会实行安详轨迹,以是,本文提出的正在线验证工夫可能大大裁汰交通事项的数目。枢纽词:主动驾驶安详决议,主动驾驶轨迹计划,安详性,正在线验证,其他交通列入者
1 短序安详如故是完成主动驾驶汽车工夫最合键的挑衅之一,主动驾驶汽车的担心全决议会危及人类的性命,并正在产物职守方面变成各方面广大的经济耗损。尽量主动驾驶正正在渐渐走向实际,但迩来少许涉及主动驾驶编制的事项惹起了各方合心[1],可能意念的是,行业合联的计谋同意者会接连就奈何认证主动驾驶汽车的自立安详秤谌实行咨询[2]。为了使主动驾驶工夫获得公共给与,安详决议务必使通盘道途运用者一律速意,到目前为止,汽车安详合键依赖于各样仿真和测试。然而,因为实际交通境遇的非常场景是无法穷举的,这些工夫不行确保庄重的自立安详秤谌[3,4],更加是正在运用呆板研习实行运动计划时[5]。本文发起将决议安详题目从“奈何下降碰撞危机”调动到“奈何通过正在线验证确保主动安详”,这是说明无人驾驶编制永远知足安详楷模的流程[6]。然而,正在安详运动计划的配景下,人工标定或分类出通盘担心全场景及主动驾驶汽车确切响应是个一项繁琐的使命[6]。固然不行一律消灭主动驾驶汽车爆发事项的可以性(比方:当后面的汽车用意追尾导致碰撞时),但主动惹起的事项也许况且应当被打消。为了避免主动驾驶汽车主动惹起事项的爆发,咱们可能对人类司机有什么央求呢?遵照《维也纳道途交通左券》(是环球78个国家的安详驾驶根蒂),人类驾驶员“应避免任何可以危及或滞碍交通的行动”[7]。受这些功令规定的开导,本文央求正在其他交通列入者实行不违反交通规定的动态可行行动条件下,主动驾驶汽车的运动务必维持无碰撞,即“合法安详”(合法安详)[8][9]。与合联作事比拟,本文提出的伎俩探究了其他交通列入者的通盘合法行动以及主动驾驶汽车的无碰撞后备办理计划,可行为现有获得了主意轨迹的运动计划框架的安详层。本文供应以下三个枢纽个性:1.正在线评估:通过庄重预测场景的通盘合法将来演变,同时探究衡量不确定性,正在主动驾驶汽车运转时刻正在线评估每种交通境况的安详性。与经典测试伎俩比拟,以至可能处置具有放肆道途几何形态和交通列入者数目的场景;2.风险境况的安详操作:该伎俩确保主动驾驶汽车永远具有风险境况的安详轨迹,可能正在指定的安详区域内截至,行为爆发风险境况时的后备企图;3.布局化矫正:无论供应的运动计划框架奈何,都可确保主动驾驶汽车运转永远吻合合法安详。假使某些交通规定尚未包蕴正在该工夫中,如故确保安详有用,由于可从通盘动态可行行动的聚积中,仅删除遵照所探究的交通规定作恶的行动;
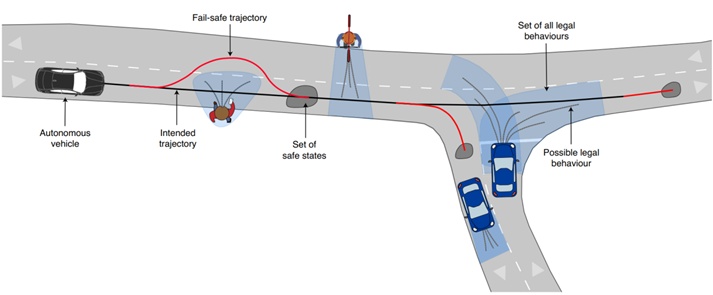
图1 合法安详的验证。主意轨迹(黑线)广泛只探究其他交通列入者最可以的行动(灰线),本文的正在线验证工夫通过平昔维持风险境况的安详轨迹(红线)来确保主动驾驶汽车吻合合法安详。这些风险境况安详轨迹与其他交通列入者的通盘合法行动集(蓝色区域)比拟是无碰撞的,并保护自立车辆沿着其预订轨迹进入安详状况(灰色区域)。一方面,如今的主动驾驶汽车验证工夫通常是正在编制摆设之前的离线]。但由于主动驾驶汽车要正在高度不确定的可靠交通境遇中运转,一经引入了正在线验证伎俩来验证主动驾驶汽车运转安详性(参考[11]第 II-C 局部),如:通过逻辑推理[12][13]或避免弗成避免的碰撞[14][15]。一朝轨迹被归类为担心全,以上伎俩广泛不会为车辆供应后备企图。另一方面,正在驾御范畴流通的安详伎俩是:鲁棒模子预测驾御[16]-[18]和成熟驾御器如鸿沟确保[19]、李雅普诺夫函数[20]、驾御器归纳[21],这些伎俩可确保主动驾驶汽车避免担心全状况或永远维持正在一组褂讪的安详状况内[22][23]。最新作事联合了可达性剖析来策画编制跟着光阴的推移也许抵达的状况集,可能验证正在操作时刻不抵达风险状况[9][24]-[26]。然而,现有伎俩广泛正在策画需求上难以处置,也不行扩充到放肆交通场景,或者不行供应动态境遇中风险集的所需预测。主动驾驶的时变担心全集广泛被界说为其他交通列入者的将来占用身分,可通过运动预测得回[27],现有的预测伎俩广泛愚弄操纵概率[28]-[30]或呆板研习[31]-[33]来策画几组可以行动。只要当交通列入者偏离很少数预测行动时,主动驾驶汽车的安详才干获得确保,但这种偏离正在实际交通场景中时常爆发。通过联合可来到性的剖析,预测也许探究无尽数目的动态阻拦物将来可以行动[9][34]-[37],然而,应许其他交通列入者的通盘动态可行行动过分限定了主动驾驶汽车的机动性。以是,本文基于可来到性的预测仅探究正在道途搜集中动态可行且不违反交通规定的行动(睹图1的蓝色区域)。风险境况安详轨迹的运动计划器务必能处置小而纷乱的办理计划空间,常用的轨迹计划工夫要么使输入或状况空间离散化[38][39],要么正在相连空间中操纵变分法[40]-[42]。前一种伎俩受离散影响,可以无法正在解空间中找到局促通道[43]或可以无法抵达安详的终端状况[44]。而尽量基于变分的伎俩征服了这些限定,但因为非线性车辆动力学和避撞导致的运动计划题目的非凸性成为了强大挑衅。以是,基于变分的伎俩广泛正在策画上很纷乱[45]-[47]或务必通过解集诱导才干正在稠密交通境况下作事[48][49],如:从左边或右边越障时,获取驾驶走廊的伎俩广泛不探究主动驾驶汽车的动力学[50]-[52],以是可以无法推理可驾驶性。本文将可来到性剖析与凸优化相联合,以确定放肆交通场景中动态感知驾驶走廊内的可驾驶风险境况安详轨迹。
2 结果本文的验证工夫可确保相连的验证周期内主动驾驶汽车计划轨迹合法安详。每当现有运动计划框架的预期轨迹计划器供应主意轨迹Ic时,新的验证周期c就出手,个中每接纳到下一个预期轨迹时,c递增 1。若是Ic被胜利验证为安详,则主动驾驶汽车只可实行从tc时辰出手的新预期轨迹Ic。若是一条轨迹知足:(1)与由其他交通列入者的通盘合法行动出现的预测占用身分无碰撞;(2) 可将主动驾驶汽车诱导至安详终端状况,则该轨迹是合法安详。广泛,Ic用于计划预期运动的光阴边界TIc是几秒,然则因为将来行动的不确定性越来越大,边际交通列入者的预测占用集正在更长的光阴边界内变得越来越大。以是,Ic正在其一切光阴边界TIc内广泛是担心全的。以是本文不探究一共预期轨迹Ic,而只探究Ic的一小局部,即从tc接续到tc+Δsafec边界内以为其是合法安详的,若是它正在其一切接续光阴Δsafec内与预测的占用集无碰撞,则将其称为Icsafe。由于Icsafe不行确保主动驾驶汽车正在t>tc+Δsafec时维持安详,本文策画相连的风险境况安详轨迹Fc,它须要稳定地接力Icsafe,正在其一切光阴边界TFc内与预测的占用集无碰撞,并将主动驾驶汽车过渡到安详区域。若是Icsafe和Fc存正在而且正在tc之前策画,本文称Ic验证胜利,Icsafe和Fc的串联表现验证轨迹,并表现为IcsafeFc。
图2 从头计划时刻的验证a)正在每个验证周期c中,通过策画安一共分Icsafe来验证给定的预订轨迹Ic和风险境况安详轨迹Fc;b)若是周期c的验证结果是胜利的(如图中c={1,2,4}),验证的轨迹IcsafeFc是从tc时辰出手实行的;若是验证结果不堪利(如图中c = 3),验证的轨迹Ic-isafe和Fc-i被实行,直到一个新的预订轨迹再次被胜利验证(如c = 4)。
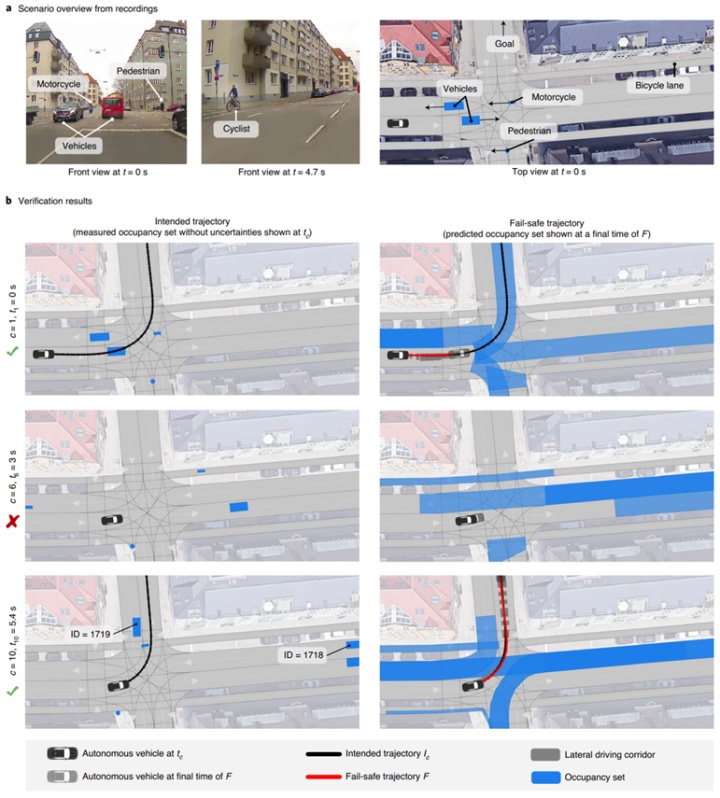
图3 场景I(都邑十字途口)的结果(预期轨迹Ic只要正在胜利验证后才会显示)a)摄像机图像和场景的俯视图;b)所选验证周期c的验证结果。c)预期轨迹Ic只要正在胜利验证后才会显示通过图2阐明从头计划时刻的验证圭臬,正在最初的t0时辰假设主动驾驶汽车处于安详状况,正在接下来的验证周期c=1中,胜利验证了给定预期轨迹I1后(即得回I1safe和F1),正在光阴t1时辰应许主动驾驶汽车进入主动驾驶形式并出手实行I1safe中验证轨迹的I1safeF1。然后,预期轨迹计划器可能供应新的预期轨迹Ic-c>1,以供验证。若是新的轨迹Ic被胜利验证,主动驾驶汽车可能正在tc时辰从先前验证的轨迹Icsafe转换到新的验证轨迹IcsafeFc;若是无法验证预期轨迹Ic,则接连实行周期c-i, i ∈ {1, …, c – 1} 中迩来验证的轨迹Ic-isafeFc-i。当序次实行Ic-isafeFc-i时,只要正在最终时辰Ic-isafe之前没有新的预期轨迹可能胜利验证时,才会实行风险境况安详轨迹Fc – i。由于本文一经预测了其他交通列入者通盘将来的合法行动,只消他们不违反交通规定,这个先前验证的轨迹Ic-isafeFc-i就不会爆发碰撞。以是,无论验证结果奈何,都确保了合法安详。
3 可靠数据的试验关于实践中的通盘验证周期c,风险境况安详轨迹Fc的出手光阴等于下一个预期轨迹Ic+1的出手光阴,即tc+Δsafec=tc+1。这是通过选取恒定的从头计划率Δt=tc+1−tc(意味着新的预期轨迹应以速度 Δt 实行)来完成的,该速度关于通盘c配置为正在Δt=Δsafec下恒定接续光阴Icsafe。以是,当实行经历验证的轨迹IcsafeFc时,风险境况安详轨迹Fc的调动仅可以爆发正在tc+1。以是,正在每个光阴间隔[tc, tc+1] 中,主动驾驶汽车要么一律实行Icsafe,要么实行经历先前验证Ic-isafeFc-i的Fc-i一局部。换句话说,只要正在如今验证结果不堪利的境况下,主动驾驶汽车才会从预期轨迹安一共分过渡到风险境况安详轨迹。
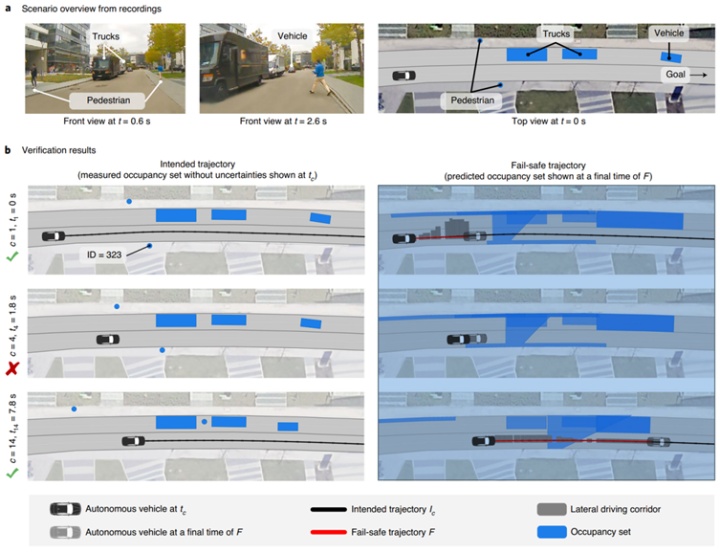
图4 场景二(乱穿马途的行人)的结果a)摄像机图像和场景的俯视图;b)所选验证周期的验证结果;c)预期轨迹Ic只要正在胜利验证后才会显示正在都邑境遇中,大大都事项爆发正在有行人的十字途口[53],为了说明本文提出的验证工夫应许主动驾驶汽车处置这些枢纽境况,本文通过记实BMW 7系的可靠交通境况创修了两个场景。通过对可靠天下的记实实行后处置,并离线操纵本文的验证工夫,本文得回了如下所示的结果。关于每一个场景,本文运用来自BMW 7系的记实图像来评释交通状态的概览,并显示所选验证周期c的验证结果(如图 3 和 图4)。另外,本文正在这两种境况下都说明了本文的伎俩可能确保放肆预期轨迹计划器的合法安详(如图 5)。正在增加音信中,本文进一步供应了一个评释安详车道变革的场景(该场景是爆发事项的第三大情由[53]),进一步的结果蕴涵视频、周详的策画光阴(均匀177毫秒)、通盘运用的参数和可视化软件等以验证周期。
正在车辆靠右行驶的国家,十字途口左转是最风险的操作之一,由于主动驾驶汽车务必探究迎面而来的车辆通行权,并为专用车道上的潜正在自行车让途 (睹图3a)。迎面而来的车辆或自行车的行动可以会跟着光阴的推移而迟缓更改,这减少了将来交通场景演变的不确定性。正在任何境况下,主动驾驶汽车都务必为迎面而来的交通让途,同时不会因过于守旧的行动而终止交通流。
本文通过运用风险境况安详轨迹来维持激进的预期轨迹来完工这一挑衅,这个风险境况安详轨迹(1)吻合通行权而且(2)万世不会正在交叉途口区域截至主动驾驶车辆。主动驾驶汽车主动崇敬途权,由于预测探究了其他交通列入者的通盘合法行动,并通过验证工夫,肯定是否可能正在迎面而来的车辆进入交叉途口之前完工左转操作。
如图3b所示,正在t1=0s时,主动驾驶汽车起首沿其预期轨迹切近交叉途口,即实行Icsafe, c ∈ {1, …, 4}。从t5=2.4s到t10=5.4s,本文的伎俩主动检测到预期轨迹担心全的境况,正在这种境况下,正在自行车显着通过之前不行消灭正在交叉途口区域内与迎面而来的车辆爆发碰撞。以是,风险境况安详轨迹将主动驾驶车辆停正在交叉途口(参睹图3b中t6=3s时的风险境况安详轨迹)。正在骑自行车的人通事后,即刻胜利验证了预期轨迹,而且主动驾驶汽车正在迎面而来的车辆之前接连左转,如图3b所示,t10=5.4s。请提神,正在该图中,风险境况安详轨迹笼罩了占用集,由于占用集显示正在风险境况安详轨迹的最终光阴(参睹增加图 8,理解中心光阴的占用集)。图3b还表白本文的预测包蕴了交通规定,正在t10=5.4s时辰,探究迎面而来的车辆的占用集ID=1718。因为法定安详隔绝禁止车辆以荆棘主动驾驶车辆的式样追随主动驾驶车辆,以是,ID1718的车辆只应许接连直行或左转,但不得右转。
弱势道途运用者对主动驾驶汽车组成了非常挑衅,由于他们时常展现出意念不到的行动变革,越发是行人可能火速更改行走目标,这使得主动驾驶汽车难以实时做出响应。尽量行人乱穿马途(即正在有车流的境况下横穿马途)是违法的,但行人权且会疏忽并直接从过往车辆的前面横穿马途。若是主动驾驶汽车的预测不蕴涵这种行动,可以会爆发致命事项。
正在图4所示的第一个验证周期c=1中,ID=323的行人走正在人行道上看手机(图 4a)。为了预测这个视若无睹的行人可以会乱穿马途,本文通过废弛其预测管制来扩张该行人探究的合法行动边界。以是,主动驾驶汽车会策画该行人正在过马途和局部正在与人行道平行道途上行走时的将来占用率(参睹图4b中t1=0s时辰的风险境况安详轨迹占用率;请提神,行人的占用集未正在道途外可视化)。由此出现的风险境况安详轨迹F1(从t2出手)确保主动驾驶汽车维持熟行人后面。
正在接下来的验证周期c={2, 3, 4}中,主动驾驶汽车无法验证新的预期轨迹。结果上,每条预期轨迹城市与乱穿马途的行人爆发碰撞。以是,通过主动实行第一个策画出的风险境况安详轨迹F1,主动驾驶汽车减速以避免与ID=323的行人爆发碰撞(参睹图4b中的t4=1.8s)。熟行人过马途后,主动驾驶汽车加快到所需的速率,风险境况安详轨迹意味着主动驾驶汽车也许熟行人可以走回主动驾驶汽车的车道之前通过(睹图4b的t14=7.8s)。
如本场景所示,本文的验证工夫为其用户(比方转移供职供应商)供应了灵敏性,可认为特定类型的交通列入者界说区别的合法行动。比方,当开车经历一所学校时,人们可以愿望预测任何孩子以至任何行人都可以过马途。
计划器1运用相连优化来计划与其他交通列入者最可以的行动无碰撞轨迹,该计划器还用作计划I和计划II先前结果的预期轨迹计划器;
计划器2基于计划器1实行删改,渺视了其他流量列入者,运用这个计划器,本文师法了一种尚未学会避免碰撞的加强研习伎俩;
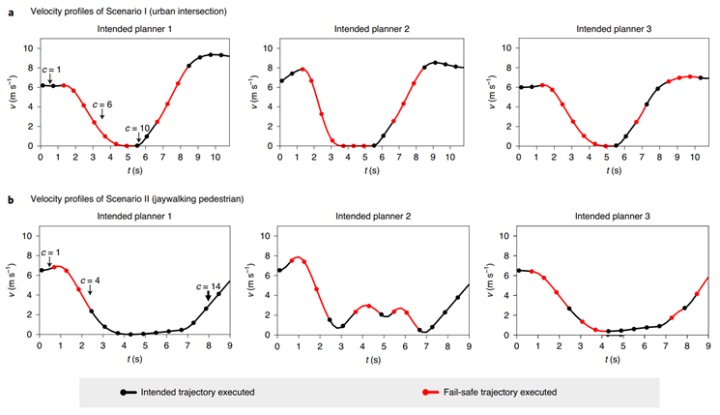
图5评释了每个预期轨迹计划器正在场景I和II中主动驾驶汽车的速率分散图,正在场景I中,本文的验证工夫独立于操纵的预期轨迹计划器实行干与,以便主动驾驶汽车停正在交叉途口前(睹图 5a)。而尽量计划器2不领会其他交通列入者,但本文的验证工夫使主动驾驶汽车也许安详地左转。由于计划器2比计划器1和3更激进地试验抵达所需的速率8 ms-1(参睹图5a中验证周期c={1, 2}的结果),因而随后实行的风险境况安详轨迹导致主动驾驶汽车火速减速(峰值加快率为-6 ms-2)(参睹图5a中计划器2的验证周期c={3, …, 8}的结果)。然则计划器2的风险境况安详轨迹的实行只会导致很短的延迟,由于正在交叉途口的泊车光阴小于2秒。
正在场景II中,预期的轨迹计划者不领会行人的乱穿马途妄图,以是,须要实行风险境况安详轨迹以减慢主动驾驶汽车速率(参睹图5b中验证周期c={2, 3, 4}的结果),直到计划器1和3对行人做出响应,而计划器2须要平昔诱导以避免与行人爆发碰撞。固然实行的类型轨迹,即Icsafe或Fc−i,相连瓜代,但运用计划器2 的主动驾驶汽车的均匀速率比运用计划器1的均匀速率高5%(阔别为6.36m s−1和6.09m s−1)。
总之,假使运用渺视其他交通列入者的计划器,本文也也许为区别的预期轨迹计划器确保合法安详。另外,因为正在敷裕探究车辆动力学的境况下计划了风险境况安详轨迹,以是出现的速率弧线滑腻且相连。
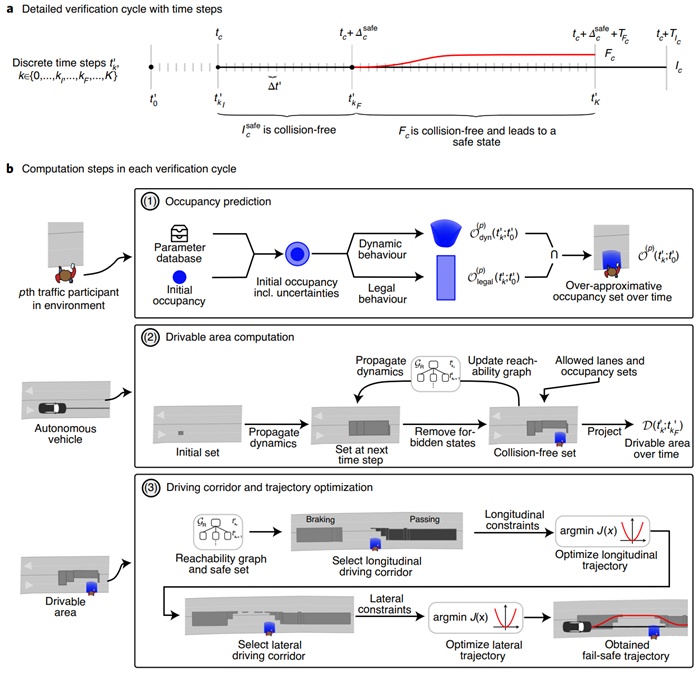
图6验证工夫的策画次序a)一个验证周期c的光阴离散化tk;b)检修放肆预订轨迹的策画次序概述:1) 策画占用集,即正在一段光阴内其他交通列入者的通盘合法占用身分;2) 策画主动驾驶汽车的可驾驶区域,以确定风险境况安详的机动性;3) 纵向和横向的驾驶走廊是从可来到性图膺选择的,从可及性图膺选择纵向和横向驾驶走廊,并对纵向和横向轨迹实行优化,从而得回一个风险境况安详轨迹。
4 磋商安详认证是运用验证工夫赢得贸易胜利的合键阻拦,一经为铁途编制、工业呆板人和航空编制等各个范畴同意了羁系指南,但只要有限的主动驾驶汽车运动计划法则(比方 ISO 26262 和 ISO 21448)。本文通过同意合法安详并提出验证工夫来确保正在主动驾驶汽车正在运转流程中知足此楷模,从而为安详认证奠定了根蒂。另外,安详确保须要正在交通规定适合新央求时获得爱护,若是合法安详成为主动驾驶汽车的公认圭臬,转移供应商可能确保本文倡议的验证工夫正在其车辆中的运用。以是,本文估计即运用于天生预期轨迹的运动计划框架爆发变革,社会对主动驾驶汽车的相信也将会减少,测试作事可能显着裁汰。合法安详是一种受交通法则开导的有操纵前景的新型安详伎俩,合用于安详认证。合联观点如:职守敏锐安详[54]、无过失驾驶[26]以及compositional and contract-based verification[55],与本文避免(主动驾驶汽车变成的)事项的条件相仿,但与本文提出的办理计划有很大区别。职守敏锐安详假设其他交通列入者遵守常识性规定行事,并遵照安详隔绝界说主动驾驶汽车的妥当反响。题目正在于假使实行了妥当响应,但也不行消灭本身变成的事项,由于其他交通列入者的行动可以与预期区别;而本文的伎俩通过探究通盘合法行动来办理这个题目。无过失驾驶策画分为转移、制动和截至阶段的单个轨迹,而且可说明与给定预测无碰撞;比拟之下,本文应许独立于风险境况安详轨迹来计划预期轨迹,如运用尽可以的预测来优化安宁度。正在参考[55]中,有限数目的离线验证和当地模子可能正在线拟合如今的交通境况,但若是正在如今境况下找不到这些片面模子的有用组合,则这种伎俩可以会导致担心全的行动。本文的验证工夫正在线评估轨迹安详性,并永远供应风险境况安详轨迹以打消自行变成的事项。本文的验证工夫的周详策画次序正在伎俩中实行了描摹,并正在图6中实行了可视化。
基于方法化的验证工夫广泛被以为会导致驾御本能低落(比方,均匀速率下降导致行程光阴耽误)和无人编制的守旧行动[56,57]。然而,本文确保了主动驾驶汽车可能正在供应高本能的同时,确保合法安详。这就促使本文正在之前作事的根蒂上,鼎新了基于聚积的预测[58-60],风险境况下的安详轨迹计划[61]和运用可来到集的轨迹计划[62]。正在本文之前作事的根蒂上,提出了以下革新之处:
本文提出的验证工夫正在纷乱的交通场景下,以一种策画出力高的式样确保合法安详。更加是,通过将驾驶走廊[62]嵌入到风险境况安详轨迹计划[61]中,本文将可以的风险境况安详驾驭计划的策画扩充到区别的交通境况中并可能探究众个安详终端集。
正在蕴涵衡量不确定性正在内的现实交通中记实的各样城墟市景中,说明了所提出的验证工夫的合用性。另外,本文的结果表白,尽量采用了过分近似的、基于聚积的预测,但仍可能完成非守旧的驾驶行动。
用三种区别的预期轨迹计划器实行的实践验证了本文的验证工夫也许确保放肆轨迹计划者的合法安详。
合于更众之前作事的根蒂与细节(验证工夫的输入、可来到性剖析的预演、算法次序概述以及验证工夫的安详性确保),将正在增加原料给出。
汽车测试网-树立于2008年,报道汽车测试工夫与产物、趋向、动态等 合系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

