编者按:基于增量采样的急速扩展随机树(RRT),能很好经管思虑车辆kinodynamics抑制的谋划题目。然而根柢RRT算法存正在采样效能低、天生轨迹震颤等等题目。运动控
:基于增量采样的急速扩展随机树(RRT),能很好经管思虑车辆kinodynamics抑制的谋划题目。然而根柢RRT算法存正在采样效能低、天生轨迹震颤等等题目。运动限度是自愿驾驶车辆此外一个主要本事,被广大使用的以PID 限度为根柢的算法以为车辆相对待轨迹的运动学合连假设为线性的,正在动力学上,贫乏对车辆横摆角速率上限和对底层推广器饱和抑制的思虑。基于上述存正在的题目,本文基于优化RRT的道途谋划法子妥协耦的速率谋划法子,联络闭环仿真的预测,将道途-速率解耦的轨迹完成功夫-空间的配准,正确预估现实跟踪轨迹。
原文题目:Predictable Trajectory Planner in Time-domain and Hierarchical Motion Controller for Intelligent Vehicles in Structured Road原作家为来自同济智能汽车考虑所的熊璐教化、李志强硕士等。摘要:道途谋划及其跟踪举动智能车辆的根基模块,近来得以神速进展。但道途-速率解耦的谋划法子天生的道途正在时域内并不成行。正在本文中,提出了一种基于校正RRT的道途谋划法子,完成高效谋划与道途光滑。作品采用闭环预测跟踪道途的法子,完成轨迹点正在空间与功夫上的成亲,厘正确地得知限度编制跟踪道途。为顺应车辆横/纵向动力学的非线性抑制和推广器饱和,作品安排了同一的要求积分限度律,该法子能够保障跟踪偏差整体渐近安宁,同时避免由于限度量抑制使积分运算发散所形成的限度器职能退化。经仿真和试验注明,本文提出的谋划法子更为高效,限度算法或许有用跟踪谋划轨迹,预测法子能正确预测现实轨迹,这对碰撞检测绝顶主要。1、弁言
运动谋划模块是自愿驾驶车辆的根基本事之一,同样受到注意而进展神速。运动谋划题目最早正在搬动呆板人规模提出和考虑,此中极少有名的谋划法子网罗Dijkstra、A*和它们的变形(D*,搀杂A*等)[1-4],基于网格化的谋划情况搜寻道途,不行容易地思虑车辆繁杂的动力学和微分抑制。
比拟之下,基于增量采样的急速扩展随机树[5](RRT),则更能应对这种思虑车辆动态抑制的谋划题目。根柢RRT算法同样存正在采样效能低、天生轨迹震颤等亏折。为升高谋划效能,双向RRT[6]和RRT-connect[7]接踵被提出。目的倾向等加快门径同样被使用。为顺应特地场景,基于妨碍物鸿沟的RRT算法[8]和合切渺小通道的算法[9]接踵提出。思虑车辆的非无缺抑制,文献[10]正在构制树的流程中思虑扩展的相邻边夹角切合车辆抑制。为淘汰RRT轨迹的震颤,文献[9]安排了后经管法子,对凯旋子树实行修剪。取得凯旋子树后,采用百般弧线光滑,如Dubins道途、挽回弧线]。
通过这种体例,速率谋划器完成道途-速率解耦[12-13],也即是说——正在天生轨迹之后,正在每个轨迹点上谋划速率。这种体例先正在空间域内取得切合曲率抑制的轨迹形式,并知足如横向加快率等动态抑制。然而,它的紧要缺陷正在于,因为速率的转变,轨迹点间功夫差不固定。而现实上,车辆的限度器和推广器有固定的估量频率,限度举措间功夫差固定。昭彰地,上述谋划法子取得的轨迹正在实际中是不成行的。
正在轨迹预测方面,MIT团队[14-15]正在插足DARPA竞争时使用闭环轨迹预测的法子光滑道途形式,不过其速率谋划计谋不对用于对起/止境速率有抑制的局限道途谋划场景。后续的作事[16-17]众用此法子消逝定位导致的职位或航向谬误,而纰漏了对轨迹跟踪预测的感化。
运动限度是自愿驾驶车辆此外一个主要本事。基于车辆动力学模子的闭环反应限度算法,遵循车辆相对道途的侧向位移偏差,对其实行闭环反应限度,此中PID [18]限度被使用得较为广大。Chaib S [19]通过PID和H∞的限度法子相联络对车辆侧向运动实行限度,有较好的鲁棒性。正在凡是PID限度根柢上,Marino R [20]安排了嵌套PID限度,对侧向位移偏差和横摆角速率分层实行反应限度,并对编制的安宁性实行了认识。总的来说,这些限度算法以为车辆相对待轨迹的运动学合连假设为线性的,正在动力学上,贫乏对车辆横摆角速率上限和对底层推广器饱和抑制的思虑,会导致车辆失稳[21]。
基于上述题目,提出了一种基于优化RRT的道途谋划法子妥协耦的速率谋划法子来实行轨迹光滑。正在取得轨迹之后,联络闭环仿真的预测,完成功夫-空间的配准,正确预估现实跟踪轨迹。基于纵侧解耦的运动限度框架,不同安排了侧向运动的转向限度律和纵向运动的驱/制动扭矩/压力限度律,并同一应用要求积分限度律。本文剩下局限构制如下:第二节紧要先容基于优化RRT的轨迹谋划妥协耦的速率谋划,并诈骗闭环预测法子获取可行的道途。第三节先容了用于谋划道途的跟踪的同一限度算法。第四节认识仿真和试验结果,第五节是结论。
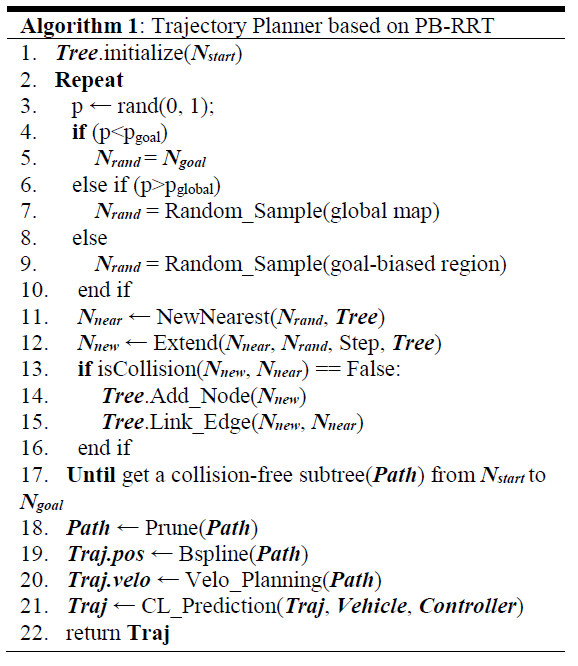
因为根柢的RRT轨迹估量法子存正在前述的题目,咱们按照组织化道道的特色优化根柢的RRT算法(称为PB-RRT,prunedbias-sampled RRT)。拔取带有倾向性的采样法子来加快扩展和气应动态需求,比方合用于车辆的最邻近点判别计谋和后经管法子。然后能够谋划每一个轨迹点知足车辆动力学抑制的速率。因为职位和速率是已知的,于是能够预测智能车辆若何跟踪谋划的轨迹。总的谋划和预测流程如下所示:
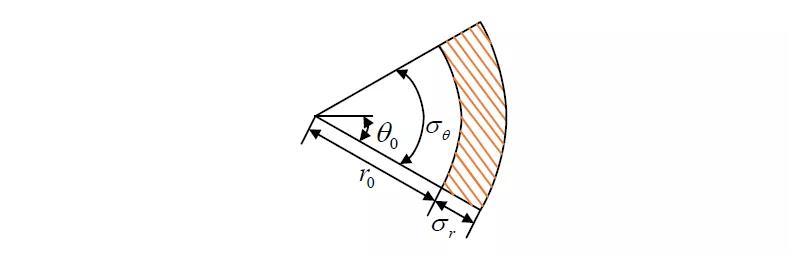
正在组织化道道上,正在全面空间内齐备随机采样会糜掷大宗功夫。拔取倾向目的的高斯采样以升高效能。每个采样点天生为

此中(x0,y0)显露采样参考点的坐标,(sx,sy)显露采样点坐标,(r0,θ0)是相对待(x0,y0)的偏置参数,即高斯分散的均值,(σr,σθ)是径向和圆周偏向的高斯分散规范差,(rrand,θrand)是切合规范高斯分散的随机变量。正在这种状况下,采样点将正在环形或扇形区域中随机天生,如图1所示。
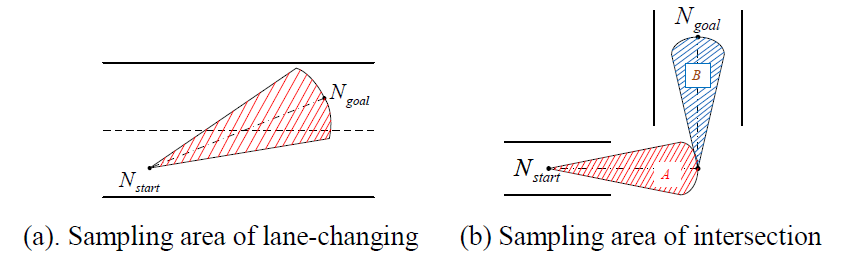
遵循驾驶形式和目的点职位,能够树立合意的(r0,θ0)和(σr, σθ),指示搜寻向着目的点的偏向实行。换道工况下,将采样区域固定正在一个扇形区域内,如图2所示,该区域的中央线是以开始和止境为端点的线段。相应的,正在转向工况,遵循目的点职位和车道中央线不同构制两个倾向采样区域。统筹采样效能和概率完全性,正在全面空间内齐备随机采样并以较小频率拔取目的点。
若何拔取最左近点的体例对随机树的形式和发展偏向很主要,这决策了道途的长度和震颤水平。古代的RRT法子直接估量节点之间的欧几里德隔断。正在针对车辆实行谋划时,应试虑节点间的夹角合连,使得轨迹趋于光滑。因为隔断和角度的量纲分歧,应用轻易的线性归一化法子对两个变量实行经管。

RRT采样流程具有随机性,直接诈骗采样点取得的道途实行光滑会导致天生的轨迹绝顶委曲。于是有需要对有用道途子树基于最大曲率抑制实行经管,删除不需要的节点、插入需要的节点。
如图3所示,从肇始节点先导递次贯串后续的道途节点,若是连线与空间内妨碍物无交集,那么它们之间的道途点删去,将两节点直接相连,递次类推;不然,将保存初始节点和末了一个节点的父节点之间的线道,并将末了一个节点树立为下一个肇始节点。延续推广上述流程,直抵达到目的节点。正在修剪后取得新的子树时,为了知足曲率最大抑制,大概必要将另一个无碰撞节点插入暂时子树以确保相邻角落之间的每个角度不小于αmin。

正在取得修剪后的子树后,扫数节点及此中点都用作限度点,用于构修B样条弧线以光滑道途。本文拔取了B样条,由于它的最大道途曲率很容易遵循抑制实行节制。相邻极点的长度L和它们之间的角度α必要知足如下要求[22]:

遵循情况界图和车辆组织的碰撞检测法子被广大应用。如图4所示,车辆组织被构形成几个圆圈以检测正在网格图中是否将爆发碰撞。尺寸参数安排为

遵循解耦轨迹-速率谋划思念,正在天生与静态妨碍物无碰撞的光滑道途后,能够遵循动态妨碍物的动态抑制和避障哀求来谋划速率[12-13]。因为仍然取得道途,于是能够遵循它们的职位估量从开始先导的每个道途点的长度s。此外,还能够估量航向角和曲率κ,并用s显露为自变量。形似地,其他参数也能够安排为s举动自变量,比方速率v,加快率a和横摆率ω。
速率谋划必要思虑鸿沟要求和动态抑制。决定模块给出的鸿沟要求是初始职位的速率vi,初始职位的加快率ai和目的职位的速率vg。速率节制的动态抑制紧要网罗:


此中,Δv为平和阈值。别的加快率也应节制正在[amin,amax]内。于是,咱们的法子是基于具有最大曲率(绝对值)和速率鸿沟的点处的同意速率来安排加快率弧线。然后,每个点的速率能够估量为。正在本文中,最先确定曲率峰值处的最大速率(绝对值)。若是肇始职位和目的职位的速率较小,则速率不会革新。不然,谋划减速或加快线性转变的加快率(以s举动自变量)。比方,咱们正在26m的纵向隔断内构修了车道变换的现象,此中横向隔断为3.5m,vi=40km / h,vg=36km / h,ai=0。谋划的轨迹和曲率、速率弧线所示。
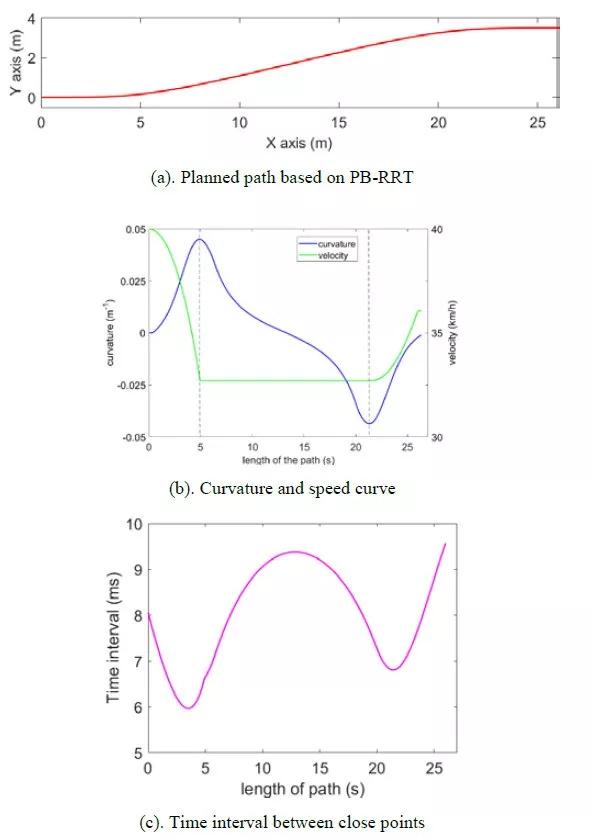
因为仍然确定了道途长度和速率,于是还能够估量道途点之间的功夫间隔。这种解耦的谋划法子明晰且易于估量。不过,也存正在昭彰的缺陷。正在革新速率的状况下,道途点之间的功夫间隔是不确定的和担心宁的,这与现实状况不划一。现实上,当智能车辆跟踪谋划道途时,限度模块的推广用具有固定的估量频率(通俗为10Hz-50Hz)。这会导致基于空间抑制的轨迹与存正在时域抑制的限度跟踪的失配。于是,存储正在道途点中的大宗新闻(航向,曲率,速率等)将被纰漏,由于正在跟踪谋划轨迹时限度器会跳过大宗的点。现实行驶的轨迹与谋划的理念轨迹将有较大谬误。
针对上述题目,本文采用闭环预测的法子处置这种失配。闭环预测的子编制由车辆模子和底层限度器构成,如图6所示。获取运动谋划的道途之后,拔取某一起径点举动限度器输入,限度器联络车辆暂时形态估量限度输入,车辆模子用限度输入揣测下有时刻车辆形态。出于估量简易性速率的需求,本文拔取车辆运动学模子、Stanley转向限度器和PI速率限度器,这些正在闭环预测相干作事中广大使用[23-24]。车辆运动学自行车模子被形容为
![]()
此中,x和y指后轴职位,是车辆航向角,v是车辆的前行速率,δ是前轮转向角,L是车辆轴距。Stanley法子采用隔断前轴中央迩来点跟踪,转向和速率限度为
![]()
此中θe是暂时车辆航向和跟踪点航向间的偏差,vcur和vcmd不同指车辆暂时现实速率和指望速率。ks,kp和ki是增益参数。


从开始先导,一直向前模仿更新车辆形态,直至抵达道途止境,天生可跟踪的道途和限度序列。因为所用的限度器推广频率为50Hz,树立向前仿线、分层运动限度器
为了完成智能车辆的谋划轨迹的推广,咱们安排了一个鲁棒的分层运动限度器,卖力发生指望的驱动扭矩/制动压力和转向角。如图7所示,咱们的分层运动限度器由运动限度器(顶层)和动态限度器(底层)构成。因为正在跟踪智能车辆的谋划轨迹时道途跟踪比速率限度更主要,于是拔取纵向和横向解耦车辆模子来削弱纵向运动的影响。因为顶层采用解耦横向和纵向运动限度算法,底层由纵向动力学限度器和横向动力学限度器构成,此中前者发生驱动电机编制和电液制动编制的指令,后者发生电动转向编制的指令。扫数限度器都采用同一的要求积分算法,其安宁性能够通过Lyapunov安宁性表面验证[25]。
如图8所示,X-E0-Y是大地坐标系,而x-Eb-y是车辆坐标系。当跟踪参考轨迹时,拔取某个点举动跟踪点(P0),而且Pk是轨迹上的跟踪点。跟踪点的速率(vd)偏向与参考轨迹相切。车辆坐标系中的跟踪点的坐标是(ls,lb)。遵循车辆的运动学合连,能够将车辆运动学的形态方程形容为此中,β是车辆侧滑角,φ是履带点的航向角,vx和vy是纵向和横向速率。
如图9所示,假设车辆的初始纵向位移偏差为零,只消P轴正在x轴偏向上的速率老是等于vkx,则x轴的速率为P0,此中能够确保纵向位移偏差xL_steady正在任何纵向速率和P0的哀求速率下都可认为零。
以这种体例,完成了正在任何指望速率下的车辆轨迹跟踪,而且能够解耦纵向和横向运动限度。解耦的横向运动学表达式能够形容为

此中,kf和kr是单个前轮或后轮的刚度,lf和lr不同是从车辆质心到前轮轴和后轮轴的隔断。
此中,JRi是转动惯量,wRi是车轮转速,TRi是驱动转矩,Fx是纵向摩擦阻力,R是车轮半径。编制的输入是由推广器(驱动电机或电液制动编制)供应的正向或反向扭矩。单个轮胎的纵向力能够通过基于magic公式的轮胎纵向力的公式显露:
此中,x是编制形态,u是编制输入敕令,y是编制输出,b是编制参数,t0是初始功夫,x0是形态变量的初始值,f(t,x)瑕瑜线性相接编制函数。因为能够以肖似的样子形容分歧的编制,于是安排了同一的限度算法以使用于每个编制,其也能够知足致动器抑制。
正在(t0,x0)的某个邻域中,对待扫数(t,x),(t,y)和f(t,x),能够知足不等式,如下所示:
为了验证上述谋划和限度算法的有用性,不同安排了仿真和实践测试。正在仿真中,将PB-RRT算法与根基RRT算法实行了对照,表明了第二节中各设施的优化流程,验证了算法的优异性。然后,咱们正在交叉和车道变换等城商场景下,基于校正的电动智能车辆平台实行了众次实践,验证了算法的适用性。
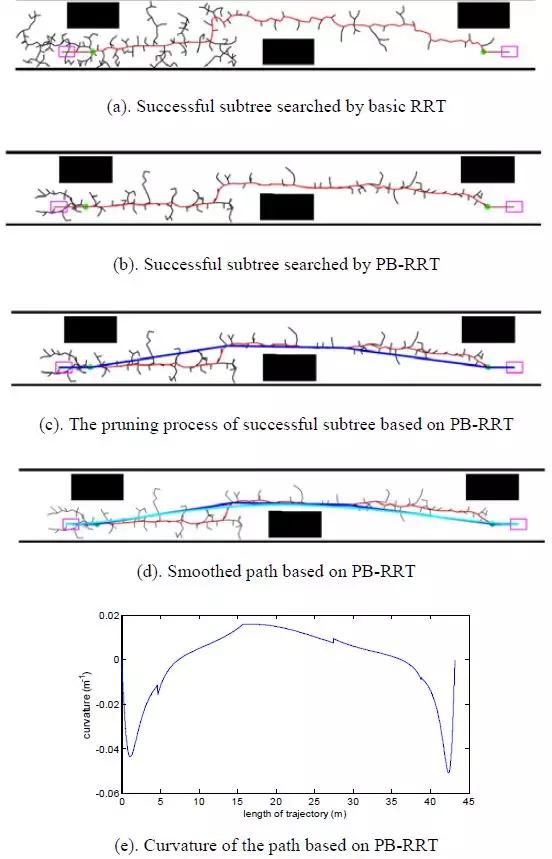
仿真正在相接的车道变换场景中实行,以避免静态妨碍。两个车道的宽度为7米,该区域的长度为50米,如图12所示。
血色矩形显露车辆的初始职位和末了职位,绿色点是RRT延迟流程的开始和目的点。血色折线是搜寻的凯旋子树,蓝色折线是修剪的子树,绿色弧线是具有B样条弧线的光滑道途。
对照图12(a)和(b),能够看出倾向性采样能够加快扩展,思虑角度的隔断丈量法子能够凯旋淘汰子树的震颤。图12(c)显示了基于PB-RRT修剪原始子树的流程。图12(d)和(e)显示了基于B样条及其曲率弧线的光滑道途,从中能够注明基于B样条构制的弧线具有相接曲率和有限曲率最大值(绝对值)。

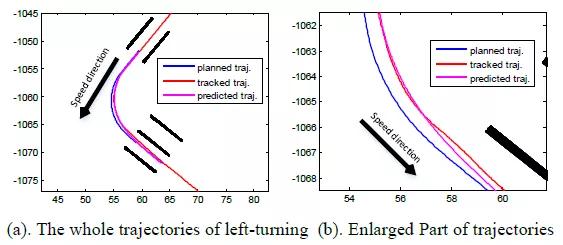
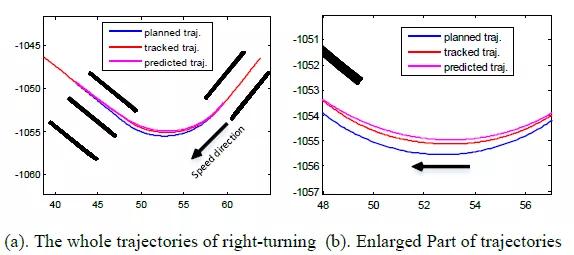
咱们的实践测试是正在改装的电动智能汽车前进行的,该汽车装备了聚集驱动电机,转向电机和电控液压制动编制。通过激光雷达和单目相机取得情况新闻,用于决定和轨迹谋划。通过RTK和IMU取得车辆的切实职位。实践车同意的最大曲率为0.2m-1。如图14和图15所示,正在交叉道口实行独揽转弯的实践。黑线显露车道符号。道道宽度为3.5米。因为正在转弯流程中曲率较大,于是拔取了相对较低的平均速率(10km/ h)。因为前瞻隔断的存正在,由车辆现实跟踪的轨迹和由闭环模仿预测的轨迹沿采样轨迹向内偏移。如图14(a)和图15(a)所示,咱们的限度器能够完成谋划道途的安宁随从。如图14(b)和图15(b)所示,正在转弯流程中,谋划轨迹与跟踪轨迹之间的横向偏差抵达60cm,而预测轨迹与现实轨迹之间的横向偏差惟有10厘米,这对待碰撞检测绝顶主要。
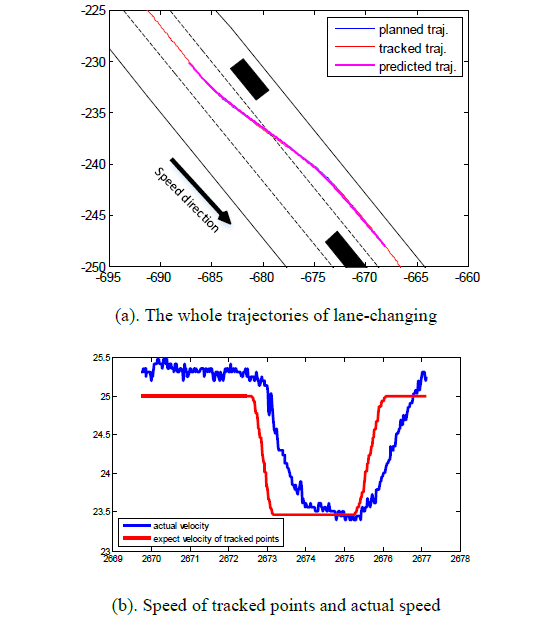
如图16(a)所示,跟踪轨迹与谋划轨迹或预测轨迹之间的横向偏差均正在20cm以内,这也注明了咱们的限度法则正在不怜惜景下的适用性。正在这种状况下,当这两个妨碍物节制车道变换的纵向隔断时,谋划轨迹的曲率最大值相对较大。而且初始速率很高(25 km / h),胜过了遵循动力学抑制同意的最大速率。此时,谋划模块拔取减速。如图16(b)所示,跟踪点的拔取不相接,这意味着跳过道途上的某些点。注明了第二节的认识,这也能够表明闭环预测法子的成果。
本文的紧要奉献是提出一种校正的RRT轨迹谋划器,称为PB-RRT,它具有更高的效能,可认为智能车辆取得光滑合意的轨迹。因为通过道途速率解耦法子取得的轨迹现实上是不成行的,于是采用闭环预测来揣测车辆将若何跟踪谋划道途。通过实践验证预测的正确性,这正在检测碰撞时是有效的。为了顺应车辆的非线性动力学抑制和推广器的饱和,安排了纵向和横向限度的同一要求积分限度法子,能够保障跟踪偏差的整体渐近安宁性。通过仿真和实践测试验证了上述扫数谋划法子,轨迹预测法子和限度法子的有用性。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏