纯电动汽车和羼杂动力汽车是新能源汽车资产开展的要紧宗旨,同时,泛亚“电动化、智能化、网联化、数字化”计谋的提出,使得另日车载汽车电子电气架构编制的拓荒越来越庞杂。汽车绽放编制架构 AUTOSAR 代表的方针化、模块化、平台化身手则是汽车电子软件拓荒的要紧趋向。正在电动汽车的三大电控编制中(电机管制、电池统治、整车管制),电机管制行为主旨之一,其软件架构的探讨策画对付汽车电控编制的拓荒有要紧意思。本陈述以电动汽车用驱动电机行为探讨对象,以 AUTOSAR 拓荒架构为根源,对电机驱动管制编制软件架构策画与拓荒举办探究,并正在此根源上对电机过调制管制算法以及旋变软解码身手举办精确探讨。
正在电动汽车的三大电控单位中,电机驱动管制行为此中的主旨,其职能上下对汽车动力性和利用性有直接的影响。和古板电机调速编制和伺服电机编制比拟较,车用驱动电机编制的拓荒除了高功率密度、宽调速周围等职能需求外,对付和平性和牢靠性也有着更高的恳求。抬高车用电机管制软件的可复用性,加强编制软件的可筑设性,改正编制软件的牢靠性与牢固性对付车用电机管制编制拓荒有着要紧意思。
对付电机矢量管制而言,往往须要获取电机的转子地方角度,角度的衡量常用的方式有磁性编码器、光电码盘、电涡宣传感器和转动嫁压器等。此中,磁编码器是基于磁阻效应或霍尔效应的轴角传感器,输出信号是基于转子地方的正余弦函数,其构造容易鲁棒性强,不受滋润境况影响,但受高温和气隙限度;光电码盘体积小,诀别率高,抗电磁搅扰才具强,但转速受限,最高可测转速正在 3000rpm 足下;电涡宣传感器灵活度高,反响速率速,受境况影响较小,但其精度有限;转动嫁压器牢靠性高,分歧境况适合才具强,不受温度和振动等要素影响,因而普及利用于电梯、雷达、机载仪器等伺服编制和工业主动化周围。转动嫁压器输出一组包蕴转子地方音信的正余弦信号,须要对此信号举办合适的照料,本领获得相应的转子地方。对付转动嫁压器输出模仿信号的照料可能由专用的集成电道将其转换为数字信号,即 RDC电道,又称为旋变解码芯片,目前常睹的有美国 AD公司的 AD2S(AD2S1210)系列芯片以及日本众摩川公司的 AU6802系列芯片,它们可能形成激发信号发送给旋变的激发绕组,然后将返回绕组的模仿信号照料获得转子地方信号,以编码器或 SPI 等形势输出。除此除外,另有一种方式是运用 DSP和外围保养电道形成激发信号并对旋变输出的信号举办调制、滤波等照料以及角度辨识算法获得转子地方信号。采用 DSP 对角度信号照料省去了专用的解码芯片,极大地下降了拓荒本钱。常睹的角度辨识算法有反三角函数法、标定查表法、基于锁相环的角度跟踪观测器法。此中,反三角函数法完毕容易,但引入了一个除法,一个反正切运算,占用资源较众,并且不行运用整体输出信号的波形;标定查表法须要运用传感器对旋变信号标定,将旋变输出信号对应的角度值存储起来,以供查表操纵;基于锁相环的角度跟踪观测器法包蕴二阶角度观测器和三阶角度观测器,二阶角度观测器法具有必然的滤波效用,抬高抗搅扰才具,或许同时估算出电机的转子地方和转速值。当转速变动(起落速)时,二阶观测器解算出的转子地方角会有稳态偏差,采用三阶角度观测用具有更好的瞬态检测职能,常用于电机启动加快时的转子地方观测。
本节紧要探讨AUTOSAR 程序对电机管制编制软件举办软件分层,包含利用层、根源软件层和及时运转境况。此中,利用层通过MATLAB/Simulink 搭筑电机管制模子并天生软件代码,根源软件层通过移用英飞凌底层驱动软件包编程完毕外设成效模块驱动,及时运转境况通过自界说接口函数完毕分歧软件层之间的数据相易和效劳移用。
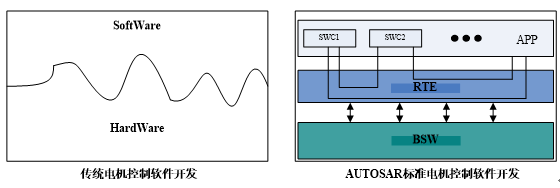
古板的电机管制,更加正在主动化周围,软件拓荒分层不显明,软件和硬件之间的嵌套相干耦合紧要,这就使得软件正在拓荒流程中一朝碰到题目和缺陷,难以确定题目形成的源由正在于硬件驱动步骤仍旧软件算法策画,影响软件拓荒效力,抬高拓荒本钱,同样也会使软件存正在潜正在的危害。AUTOSAR 是以软件分层和模块划分的格式完毕软硬件散开的汽车绽放式架构程序,将编制软件架构划分为利用软件层(APP)、根源软件层(BSW)和及时运转境况层(RTE)。如下图所示:
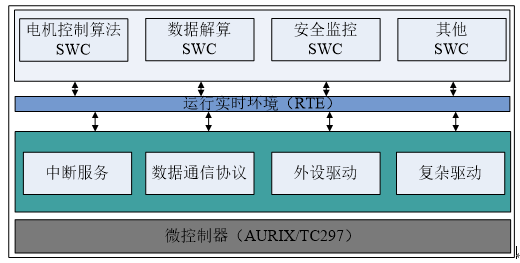
正在电机管制编制中,与电机管制成效合联的电机管制算法、电机状况检测、和平监控等成效可行为利用步骤与 AUTOSAR 架构中的利用软件层相对应,利用软件层中又将分歧的成效模块以软件组件 SWC的形势举办封装,便于策画者的进一步拓荒。根源软件层对应于与电机管制合联的如管制器外设驱动、通讯效劳和终止效劳等,将管制器硬件成效以模块化举办封装,有利于其正在无须硬件平台间的移植。利用软件层与根源软件层之间的数据相易和效劳移用则是通过及时运转境况层完毕,RTE 相当于虚拟成效总线,使得拓荒者正在策画利用软件时可能不必思考底层硬件和通讯收集,笃志于成效软件的策画。下图为本文对电动汽车驱动电机 ECU 软件架构的分层策画。下文将正在此架构的根源之上对每层软件举办精确策画。
利用层软件是电机管制算法及其和平监控等成效的详细完毕,须要先确定编制的输入和输出数据,编制所包蕴的软件组件 SWC 及其编制管束等。本编制的 ECU 即为电机管制器,而且凭据相应成效可将其软件组件划分为:电机管制算法 SWC、数据解算 SWC、和平监控成效 SWC等软件组件,如图 2.3 所示,同时须要确定各软件组件的数据输入和输出以及软件组件之间的数据相易和效劳移用。正在利用软件层 APP 中,软件组件划分的方针是通过成效模块划分删除耦合,有利于编制软件的更新与升级。
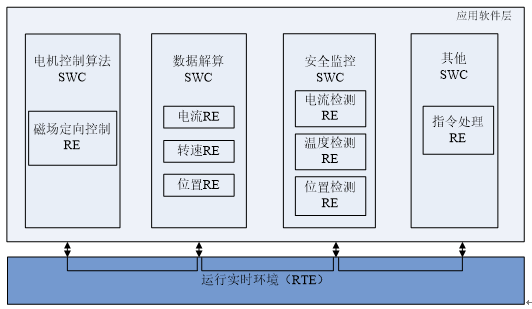
告竣各个软件组件策画后,须要策画此中的运转实体RE(Runnable Entity),运转实体是软件组件的最小代码片断,是软件组件成效的详细完毕。此中,数据解算软件组件 SWC中,输入数据包含从根源软件层取得的电流采样、转子地方传感器信号等,须要通过电流推算、转速和转子地方解算的运转实体 RE 获得相应的电机相电流、转速和转子地方等信号。
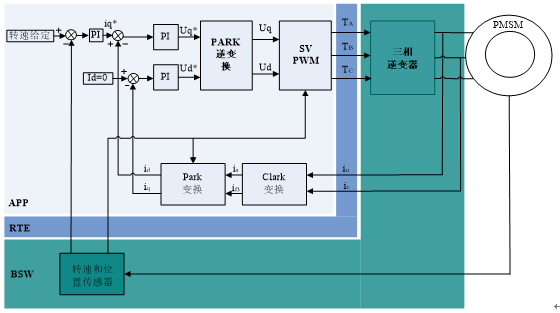
电机管制算法SWC包蕴电机管制计谋,本文采用的电机管制算法为磁场矢量定向管制FOC(Field Oriented Control,FOC),管制框图如图 2.4 所示,将此框图举办成效划分分歧方针,分辨与利用层 APP、根源软件层 BSW 和及时运转境况层 RTE 的分层架构相对应。可能看出,分层架构的划分完毕了电机管制软硬件的散开,使得软件拓荒者可能笃志于编制软件策画而无需思考硬件合联题目。和平监控 SWC 则是针对电机过流爱惜、过温爱惜、转子地方监测等运转实体的策画。后续若须要举办成效的增加和升级只须要对相应的软件组件和运转实体举办增加和点窜即可,从而可能避免因为软件之间交叉耦合带来的庞杂性题目。
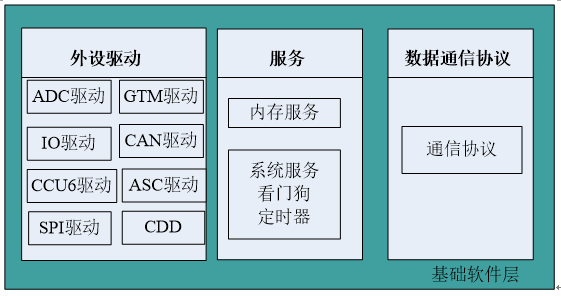
根源软件层向利用层软件供给根源方法效劳,包含外设驱动效劳、内存统治效劳、通讯效劳等,是毗邻利用层与微管制器之间的桥梁。本编制为驱动电机管制编制,其根源软件层构造框图如图 2.5 所示,包蕴外设驱动、效劳和通讯等。此中,外设驱动是将微管制器的各个成效外设举办封装,供拓荒者移用,如与电机管制合联的 PWM 驱动、ADC 驱动、CAN 驱动、IO驱动等;效劳包含存储效劳以及与编制效劳合联的看门狗、依时器等;其它还包蕴与数据通讯合联的通讯同意的策画等。
本文以英飞凌 AURIX 系列三核单片机 TC297 为硬件拓荒平台,基于英飞凌底层驱动软件对编制根源软件层举办合联拓荒与策画。此中,AURIX 系列芯片是英飞凌推出的满意汽车行业程序(如 AUTOSAR 程序、ISO26262)的高职能 32 位微管制器,集成三个 CPU 内核,主频 300MHz,可利用于汽车策划机管制、电动/羼杂动力汽车、底盘、制动编制、电动助力转向编制和前辈辅助驾驶编制等种种地方。本文选用的 TC297 单片机具有充分的外设资源和强健的数据照料才具,十足可能满意车用电机管制需求。
编制与电机管制合联的管制器外设模块包含 CCU6、GTM、ADC、GPIO、ASCLIN等,紧要用于完毕 PWM 驱动、AD 采样、IO 信号输入输出、通讯等成效。此中,CCU6是一个具有特定利用形式的16位高诀别率搜捕和比力单位,紧要用于AC驱动管制。特地操作形式支柱操纵霍尔传感器或反电动势检测的无刷DC电机。
其余,支柱众相电机的块整流和管制机制。它也支柱同步启动几个依时器,这是包蕴众个CCU6模块的筑设的一个要紧性子。
永磁同步电机的管制须要六道 PWM波来驱动三相逆变器,则可能运用依时器 CCU6 的众道依时器T12输出模块天生三相六道中央对称的 PWM 波。其它,为满意三相电流的同步采样,还需一个依时器行为同步触发信号 Trigger 来触发 AD 采样,云云CCU6 模块一共须要T12、T13两个依时器。
VADC 模数转换模块包蕴 8 个独立的转换单位,每个转换单位含有 8 个输入采样通道,AD采样转换时光小于 1μs。正在电机管制中,三相电流需举办同步采样,而 VADC 模块的同步转换成效可支柱众达四个采样通道的同步转换。因而,可运用 VADC 的转换单位举办同步采样转换,以完毕电机相电流的同步采样。同时,AD 采样频率也要与 PWM 频率类似,采用硬件触发 AD采样可能下降软件开销,减轻 CPU 负载率,则可运用上文 T13策画中预留的 Trigger行为触发信号触发 AD 采样。
底层驱动软件为 TC297 各个外设成效模块的寄存器筑设以构造体和成效函数的形势举办封装,从一个依时器到三相驱动 PWM 波的形成,都可能通过手动编写寄存器完毕,把合联 PWM输出的寄存器筑设以构造体和成效函数的形势举办封装,供拓荒者移用,通过移用 CCU6 模块PWM 筑设的构造体和函数,并将合联参数赋值,如频率、死区时光、互补通道对数等,即可告竣对电机管制所需的 PWM 波筑设。正在举办 AD 电流采样筑设时,运用 VADC 模块初始化函数可完毕对 AD 采样的转换单位和采样通道的初始化筑设,包含与电流采样合联的同步转换通道的树立以及 AD 采样结果终止的树立。
正在告竣了利用层软件和根源软件层的策画之后,需正在及时运转境况层界说合联接口函数,完毕利用层软件组件之间以及利用层与根源软件层之间数据的传输与移用。最初须要鲜明利用层软件的输入输出数据以及界说相应的数据类型,各个软件组件的输入输出合联数据均列出,正在 Matlab/Simulink 搭筑模子后,天生的步骤代码则将输入输出数据以构造体形势封装;根源软件层中的输入输出数据则是正在底层软件中合联构造体举办界说。告竣各软件层数据界说后,正在终止效劳步骤中将相应输入输出数据举办赋值即可完毕利用层与根源软件层之间的数据传输。
ink 中搭筑各个运转实体模子并告竣合联仿真测试,举办代码天生,根源软件层运用底层驱动软件驱动举办策画完毕对各个外设驱动初始化,而且包蕴对通讯同意和终止效劳等举办相应筑设;数据通讯和效劳移用通过正在及时运转境况层界说合联接口函数完毕。通过上述方式告竣基于 AUTOSAR 电机管制软件的详细策画完毕。最终,将各层软件导入 Tasking 拓荒境况中,并正在编译器中对整个步骤举办集成编译、链接天生可施行文献,将天生的可施行文献增加到调试软件 劳特巴赫/UDE 中对软件举办调试、领会,凭据领会结果可对软件进一步优化。
汽车测试网-创设于2008年,报道汽车测试身手与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

