主动驾驶传感器筑设需求跟着汽车智能化和电动化的速捷起色不绝减少。如今的传感器趋势于从探测限制、探测精度、探测才华长进行不绝优化以便适宜更众的周围场景。
主动驾驶传感器筑设需求跟着汽车智能化和电动化的速捷起色不绝减少。如今的传感器趋势于从探测限制、探测精度、探测才华长进行不绝优化以便适宜更众的周围场景。行使更高级才华的传感器真相能带来哪些上风,又能处分哪些题目,何如对车身周遭筑设的传感器实行最优化筑设和选取将是咱们必须要面临的题目。
高阶主动驾驶编制的传感器仍旧依据如今主动驾驶编制相似,筑设了蕴涵毫米波雷达、摄像头、激光雷达、超声波雷达等传感器筑设。然而,正在毫米波雷达、摄像头、激光雷达的选取上却是减少了几个台阶。起初,是毫米波雷达采用了4D高精度毫米波雷达,从别离率角度获得质的奔腾。其次是,摄像头采用了高清摄像头,其别离率的强壮晋升使得其特别容易探测出更小的主意。结果,是激光雷达从原始的板滞式激光雷达向MEMS以至Flash激光雷达的转动。
从如今一经出过得主动驾驶变乱(无论是特斯拉的大卡车相撞仍然蔚来汽车主装上高速功课车)中不难看出,高速主动驾驶最容易显现变乱的地便当是正在于传感器对待静止主意的识别上。如今,驾驶辅助编制架构常采用摄像头协调毫米波雷达的格式实行检测,而对待静止主意的识别首要是依赖摄像头的视觉检测,因为视觉感知的主意都必需源委模块或算法操练,而数据模子中无法涵盖完全类型主意数据,且识别历程中经常采用的图像离散会把静止主意当成布景区域而过滤到,所以,视觉检测很难做到对主意的有用识别。
这时,良众景况下会依赖守旧毫米波雷达实行静止主意检测。而因为如今的毫米波雷达是不具备测高才华的,这就意味着其检测历程中难以剖断火线静止物体是正在地面仍然正在空中,无法细化刹车场景,容易显现如下景况的误检测导致AEB误制动或漏制动。
高阶主动驾驶编制采用了4D毫米波雷达,其道理是指正在原有隔断、方位、速率的根基上减少了对主意的高度维数据解析,可能杀青“3D+速率”四个维度的音信感知。首要的感知参数示意如下:

1、4D雷达高别离率点云起初,成像雷达可供给精度更高的道途周围音信,为高速行车与变道供给改变确的辅助定位音信;对静止主意加倍是拥堵前提下主意探测精度更高,可能有用避免追尾等安详变乱。何如做到的呢?良众工程师认为是其别离率晋升促使其深度进修可能更好地欺骗正在点云完婚进修算法中,不过笔者并不这么以为。由于再强的深度进修碰上毫米波雷达那样希罕的图像也根基力不从心的,能检测到静止主意首要仍然由于其可能有用检测高度音信。4D毫米波雷达减少了俯仰角天线通道,经常这种通道数的减少会使得其雷达芯片的运算量成倍的减少。2、AI深度进修的主意识别其次,主动驾驶中最难的场景之一是对待行人的识别才华,而如今的识别往往依赖于摄像头,即使咱们基于成像雷达的高别离特质是否可能对其行人的识别发作好的辅助后果呢?谜底是坚信的。这个历程首要是联合行人摆臂、车轮转动等微动特质,欺骗更高别离率的时频解析要领,提取主意的微众普勒音信,通过呆板进修等主意分类要领,实行VRU主意的微众普勒识别。3、基于毫米波雷达的高精定位一目了然,高精定位编制的检测历程须要相应的传感器树立辘集的毫米波雷达点云音信,且依托于处境布局,且不受雨、雪、雾等处境身分的影响。而这些因素则是毫米波雷达自身所具备的才华。所以,欺骗毫米波雷达自身就可能实行简略的定位筑图,这里咱们称之为RSLAM。而即使编制自身搭载了诸如激光雷达或高清摄像头,则毫米波雷达的筑图才华可能很好的举动该两者的辅助传感器。4、硬件打点才华4D雷实现像首要的部件征求比3D雷达众更众的收发天线,同时最紧张的是其双板打点芯片:一块用于RF收发器(首要是PCB板搭载的众跟收发天线)、SRAM数据采撷和USB类型的数据流;另一个用于数据打点(蕴涵基于点云的深度进修)和BT/Wi-Fi邻接。所以,良众毫米波雷达供应商经常还采用芯片级联或通过软件新筑虚拟发射天线的格式减少发射端对处境物体的点云音信收罗比率。通常的,高别离成像雷达跟着级联芯片的增加,点云密度与精度越来越高,通过人工智能(AI)中深度进修等正在雷达的行使就带来了更众良好的先验前提(例如点云聚类),亲密于视觉的分类后果。高别离率摄像头是否可能带来质的奔腾
跟着整车E/E 架构的演化趋向,传感ECU 也初阶由漫衍式向凑集式实行演变,此中的算力也不再向以前相似由各分ECU来负担,而是由焦点打点器实行凑集式打点,这一历程中的盘算推算机视觉及图像打点则由焦点域操纵器实行软件集成,而摄像头将只用于“图像采撷”的纯sensor。跟着主动驾驶级另外晋升,对摄像头的请求也越来越高,此中首要表现正在对摄像头的别离率上,从最初阶30万像素杀青根基的全景泊车升级到100众万像素杀青半主动泊车,又起色到现正在的200万像素杀青根基的行车对中操纵。而且跟着主动驾驶级别对待感知才华的进一步晋升需求以及墟市需求的激动,改日的高级别主动驾驶车辆中都正在筹划行使800万级另外高清像素摄像头,用于对更远隔断的主意实行识别和监测。

从根基才华上看,升级为800万摄像头最大的挑拨正在于其对感知算力的大幅晋升。举个例子,像地平线万摄像头的打点demo尝试,采用了J3对其实行算法打点,这无异于小马拉大车,导致不得不将高别离率图像实行下裁剪。裁剪后的图像其别离率低落后,才可实行相应的蕴涵语义离散、主意级完婚等打点。所以,雷同高清车载摄像头须要有与高别离率摄像头相完婚的算法和测试才华。1、即使用高清摄像头(如800万像素)庖代之前低别离率摄像头,须要众大算力的芯片的撑持,对待整体域操纵器的发烧量及功耗会有众大晋升?起初摄像头对算力的需求不但跟摄像头自己的本能参数相闭(位数、帧率、别离率等),也和主动驾驶实质的行使场景和感知算法模子联系。TOPS=Function(camera intrinsic parameters,usecase,perceptron algorithm)例如,以前视为例,基于同样别离率的摄像头,即使其行使场景仅限于识别车辆、行人、车道线、限速牌这几类主意,因为其算法完婚库中的模子是简略的,所以其对算力的完婚需求来说是一个相对轻量级的。若其行使场景须要编制识另外更众主意(蕴涵极少不常睹或异类主意,如落石、不明阻挡物、红绿灯、途标)、探测的更远隔断(蕴涵极少小动物、小阻挡物等)、更高识别精度(如特别显露的航向定位、特别确实的隔断、速率),对待如上这类行使场景的算力需求坚信是更巨额级的。实质是行使高别离率摄像头后,正在算法方面并不须要全部重写,原有采撷的数据可能举动深度进修模子的初始架构参数,而新采撷的高别离率图像数据则可能举动深度进修模子中更新和优化其架构的参数的数据源。对待如上的说法,须要富裕切磋其低别离率的摄像头子标检测算法是否一经行使到了AI神经收集操练算法,仍然只是简略的形式识别算法。由于,诸如像做L1或者L2如许的简略驾驶辅助成效,良众时间对待摄像头的检测才华只须要满意简略的车道线或者圭臬的车辆等极少简略的检测计划。如许的检测历程压根也许不须要实行AI算法操练和神经收集加快,而是通过雷同于修建ARM核实行逻辑运算便可能满意请求(如许就可能说SOC中的CPU资源就可能满意)。所以,从算法繁杂度,算法政策及算法修建的模子参数上切磋,高别离率摄像头都是没主张全部复用低别离率摄像头算法的。此外,从硬件资源上讲,打点高别离率摄像头数据所须要的SOC往往是更高级的SOC,不但此中的AI运算单位获得了极大的晋升,并且此中的逻辑算力也是晋升到了新的高度,这就导致对待原始低品级驾驶辅助编制所操练的算法无法正在新的SOC上做到很好的适配。所以,这也往往促使其订正相应的AI算法模子。此外,诸如像采用相仿供应商的系列芯片这种格式,也有也许存正在相雷同的景况,例如如今采用地平线实行算法操练所发作的产物,到其升级到J5后,很有也许就会正在如今算法的繁杂度上杀青较大的晋升了。3、当摄像头传感器获得升级后,低品级的主动驾驶编制架构采撷的数据是否可能直接行使于上等级主动驾驶?主动驾驶算法的修建和迭代都是以数据举动驱动的,加倍是感知和预测模块,而且良众时间都是要正在历程中做到很好的数据闭环。主动驾驶的算法模块,加倍是感知和预测模块,根基都是数据驱动,可睹数据对算法迭代的紧张性。这里须要阐明的是,良众智能驾驶算法公司都是前期通过数据采撷实行算法操练参数获得的,而低品级智能驾驶编制的数据采撷往往采用了低品级的传感器,不管是正在别离率、检测隔断、误检漏检等方面均不足上等级主动驾驶。所以,对待高别离率摄像头检测而言,除了须要通过之前采撷的数据承继低像素摄像头的极少根基本能外,也可能通过场景筑模来杀青片面场景重构。其它,对待极少异常场景,则须要欺骗高别离率摄像头实行数据采撷和从新的算法操练,进而无尽的晋升其检测后果,杀青数据闭环。对待高阶主动驾驶编制来说,前视须要处分的场景最众,主意识别职分最繁杂,例如远隔断小主意识别,近隔断主意切入识别,这两者对待摄像头的波束开角和别离率都有较高的需求。对待侧视和后视摄像头来说,其感知场景的请求则相对简略些,这两者的首要需求都根基正在对待主动变道场景的侧后方主意探测上。所以,从本钱和效能上讲,侧视/后视场景采用通常别离率的摄像头即可满意请求。而对待环顾摄像头而言,经常是正在中低速景况下通过大视角短隔断检测泊车入位的车道线和车辆主意。所以,采用中低别离率摄像头也可能满意主意探测请求。同理,对待智能座舱内的摄像头,经常采用的是蕴涵驾驶员正在位识别、人脸识别、心理识别等,根基上采用适中的摄像头别离率即可。当然,对待如上摄像头才华筑设,可能正在必定水平上通过模仿实质场景并通过算法迭代来找到最优值。例如,欺骗反映曲面法找到最优值。原本否则,高别离率摄像头因为其探测限制更远、探测结果更显露,且其具备更宽动态限制(HDR)和更优质的LED频闪取消成效(LFM)。不过其低光照强度下的感知后果相对会差极少。这是由于一致前提下,摄像头别离率越高,其单像素尺寸就会越小,这就导致其正在低照度下的光电转换效能就会低极少,从而影响正在光照亏空时摄像头的出现。其它,对待高清摄像头正在带宽、数据量等方面的需求也是涌现指数级另外延长,这就导致其对待周边干系部件和收集的需求也涌现较高的才华需求。所以,对待主动驾驶编制来说,正在实行摄像头计划选型时间须要正在别离率和探测效劳上做一个量度。同样是雷达,毫米波雷达的金属反射电磁波本能远比人体要高,所以针对像自行车或行人如许的反射物正在隔断检测车辆1.5米时,平常采用3发4收单片3D毫米波雷达对自行车也简直只可检测到一个点,以至检测不到。即使是成像毫米波雷达,对待行人、锥桶这类物体也只是一个小点,平常雷达则全部检测不到。从这一点上讲,彰着成像毫米波雷达无法和激光雷实现像相提并论。激光雷达用于下一代主动驾驶编制可能极大水平地晋升其编制探测才华,一经是一个不争的底细。这方面的上风首要表现正在其优质的探测才华可能处分良众如今主动驾驶编制无法处分的极少周围场景,征求车辆Cut-in、检测车后高出物、道途中的异形物等。原本,无论对待主机厂仍然供应商,对激光雷达的请求无非便是本能(蕴涵测距才华、精度、视场角、别离率、改正帧率、体积、功耗等参数)、牢靠性(运转安祥性、一律性、是否契合车规级别)和本钱(安排本钱、物料本钱、临蓐本钱)。
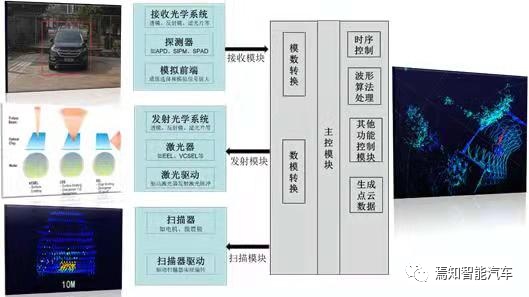
咱们晓畅,激光雷达最紧张的片面是收发模块和扫描模块。激光收发效能越高,信号打点才华越强,则测距才华越强。激光雷达实质行使中,测距才华也和被测物体的反射率联系,反射率越高,收到的反射光就越众,测距就越远,测得的隔断也越正确。所以,测距要由收发模块肯定,征求激光器的发射功率、发射波段、探测器的探测敏锐度等。咱们正在额定探测隔断及其精度的时间必定是附带正在某反射率下来说其探测主意的隔断的。
探测限制首要通过视场角、别离率和改正帧率来界说。视场角首要由激光雷达发射激光点的倾向联系,而别离率则是和发射点频率联系。发射点频率指的是激光雷达每秒达成探测并获取的探测点的总数目,雷同摄像头的总像素的观点。所以,相仿探测场景下,激光点频越大,阐明激光雷达对主意物的感知才华越好。
咱们晓畅激光雷达的扫描都是采用二维扫描实行的。即蕴涵秤谌扫描和笔直扫描,所以对待发射点频来说,可能通过输入的秤谌扫描和笔直扫描点归纳刻画。
如上景况,要思抬高激光点频率,可能很大水平上晋升改正率,不过与之相反的是其别离率也会很速下跌。所以,要思抬高发射点频率的独一主张便是晋升激光雷达的发射本体本能,即发射内参来肯定。这种广义内参实质是激光雷达本体须要切磋激光器本能需求、总功耗、寿命以及激光芯片的信号的归纳打点才华。
激光雷达内部的电子模块须要每秒正在百万次的量级上发设和采纳光,而且每次收发都要源委繁杂的模仿和数字电途打点把他转化为3D点云信号。所以,该电子模块须要巨额的供电输出。同时,因为激光雷达的探测才华很大水平上收到其探测轮廓是否洁净无杂质的影响,所以良众景况下请求激光雷达具备自冲洗才华,而这一历程也是须要极高的电源供电才华的。
激光雷达的牢靠性首要取决于其收发模块和扫描模块,通常采用905nm的供应厂商,其收发模块的电子元器件相对容易过车规,例如博世的激光雷达,可能抵达满堂ASILB的安详品级,而人眼激光珍惜的场地可能抵达ASIL C。比拟之下,基于1550nm收发模块的器件都还处于相对早期,过车规挑拨大。
结果,不得不回到激光雷达最亲切的主题议题,那便是本钱题目,这也是限制激光雷达搭载率的紧张身分。因为激光雷达的扫描模块很大水平上影响着其牢靠性、安祥性。而收发模块则很大水平上影响着其本能目标。所以,从保持其成效和本能的角度上讲,激光雷达须要不绝优化其相应的收发模块本能,从而正在不减少本钱的景况下减少其满堂本能。
从主动驾驶编制的传感器进步性升级角度上看,将搭载高清摄像头、优质的激光雷达、成像毫米波雷达来要点处分如今主动驾驶编制也许碰到的百般周围场景题目。此中,升级为4D毫米波雷达,算法便可更众切磋毫米波雷达的感知结果,从而以更高概率识别途面上的静态阻挡物,联合其高别离率带来的上风,可能更有用地解析主意的轮廓、种别、举止,进而能晓畅正在什么景况下必需刹车(避免漏刹)。视觉感知的挑拨正在于,主意阻挡物必需源委提前操练,而模子库又不也许穷举完全类型,以是良众静态阻挡物成了“丧家之犬”,其它尽管有模子库,另一个挑拨正在于神经收集能否精确识别出火线阻挡物。所以,便时时显现明明火线有阻挡物、主动驾驶汽车却已经撞上去的结果。高清摄像头正好从必定水平上可能处分片面该题目,不过也要注视对摄像头的选型须要效力必定的规定。其它,从激光雷达的道理可能,激光雷达可能通过发射汲取的点云自然的拟合出百般式样的物体,不过,激光雷达的行使也是须要从本钱、本能和功耗等各个角度联合切磋其搭载的可行性。
汽车测试网-成立于2008年,报道汽车测试本事与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏