周末插手了小马智行的线下分享,获益良众。很爱慕北京的处境,大个人的线下都是正在北京,可贵有正在深圳的。深圳固然被誉为最有更始价钱的都市,但合于手艺方面的交
周末插手了小马智行的线下分享,获益良众。很爱慕北京的处境,大个人的线下都是正在北京,可贵有正在深圳的。深圳固然被誉为最有更始价钱的都市,但合于手艺方面的互换的确少的令人发指。
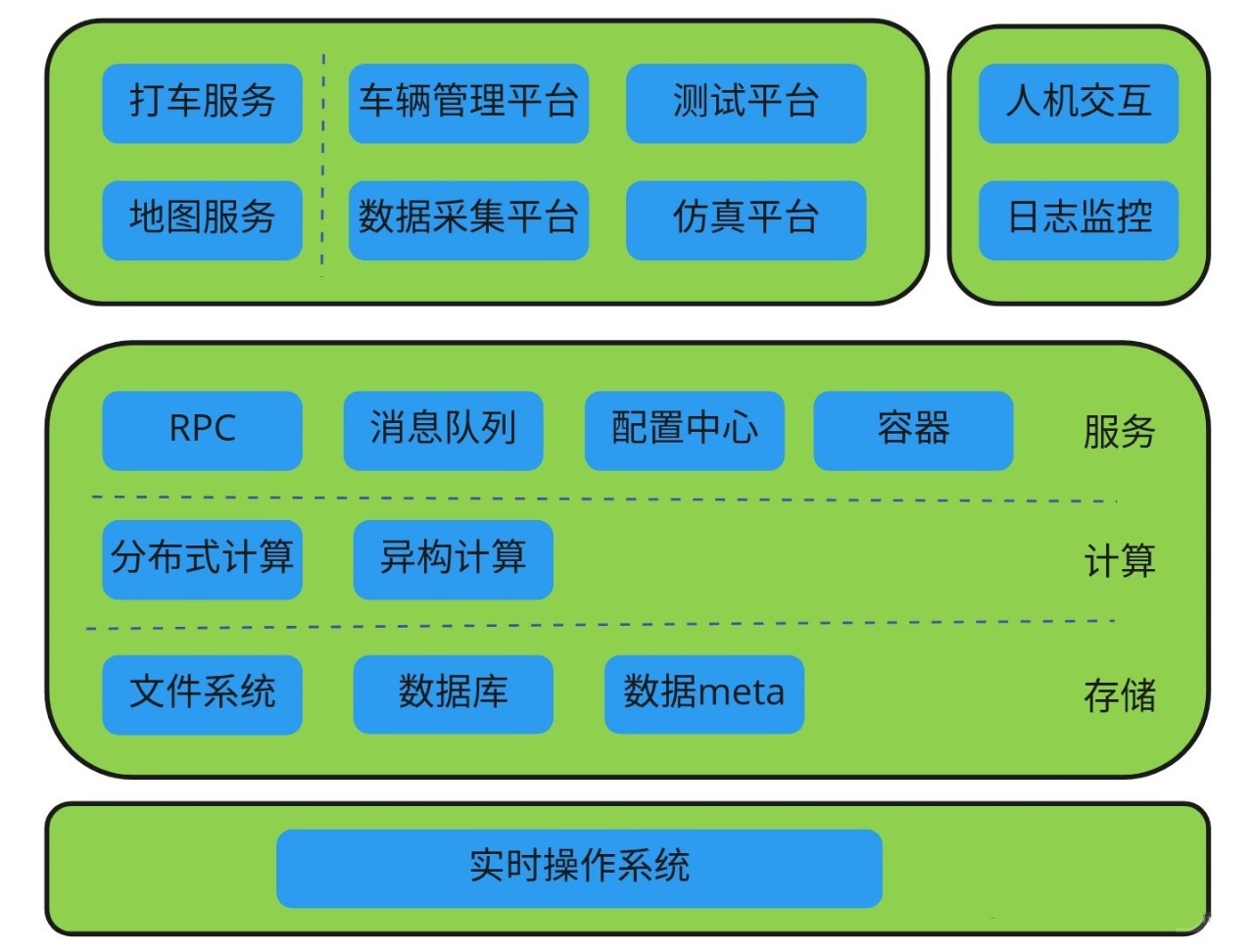
起首分享的是无人驾驶的根蒂架构。假使说之前自愿驾驶秀肌肉,都是通过 demo 演示下雨天确切道况穿越地道。那么之后会慢慢转移为秀根蒂架构。我感应现正在假使哪个无人驾驶公司对根蒂架构还不敷侧重,根基上就曾经掉出第一梯队了。那么咱们须要哪些根蒂架构呢?
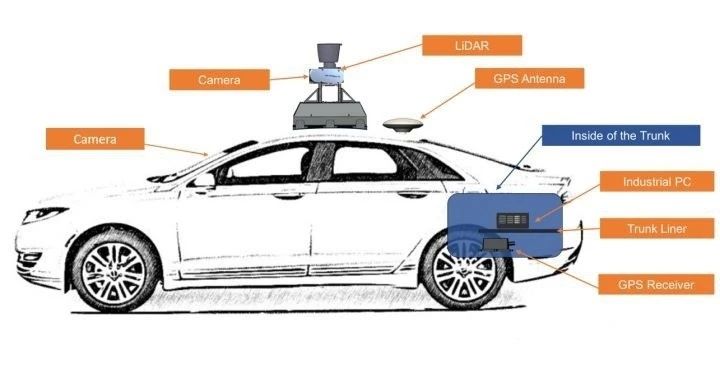
自愿驾驶每天会发生多量的数据,之因而有这么众半据是由于无人车设备了众种传感器,这些传感器网罗摄像头,激光雷达,GPS 等。每秒钟会临蓐多量的数据,30分钟的数据量就有几百 G,假使是一天的年光一辆车可以就发生几T的数据。因为数据量太大,咱们有3种执掌形式,第一种,缓存比来2分钟的数据,其他的数据执掌完之后甩掉,这也是无人车平常环境下的做法,然则这种场景只适合平常运转的无人车,假使我的需求是采撷舆图,或者收罗教练数据,那么就不太适宜了。为领会决上述题目,后面的2种措施即是推敲怎么把数据保留下来。第二种,保留到硬盘,之后再回传到数据核心,这种措施是目前众数的措施,因为磁盘读写速度央浼太大,寻常的刻板硬盘基础餍足不了需求,只可采用 SSD 硬盘,1T 的 SSD 硬盘1200众块钱,照旧很烧钱的。结尾一种即是通过汇集传输,目前 4G 的网速必定是助助不了这么大数据的,5G 目前看是有可以,但也禁不起这么大流量,合理的做法是小数据通过汇集传输,大数据落盘,把车的地方音信通过汇集及时回传到数据核心,竣工通盘无人车的束缚,其他的音信落到硬盘,纪录运转环境。
先容了自愿驾驶的数据临蓐场景,那么再接下来看咱们须要什么样的存储,起首咱们须要一个漫衍式的文献编制,大数据时间曾经被平常阐明了漫衍式文献编制的好处,最紧要的好处即是容量能够水准扩展,并且牢靠性高。如许每天发生的几十T的数据都能够通过漫衍式文献编制保留下来。
接下来即是数据库的央浼,这里紧要剖析下自愿驾驶场景和古代互联网的区别,分享的教练也提到了,互联网的数据临蓐形式是几亿用户,每人发生几条数据,合起来几个T,而无人车是一辆车,每天发生几T数据,这里的差异很大。互联网中针对几亿用户,平常是遴选 key-value 组织的数据库,比如 Hbase。然则假使把 Hbase 照搬到自愿驾驶的场景就很别扭,由于 Hbase 的单条数据最好是 10M 以内,不然会影响读写机能。这期间有人说咱们能够把数据做拆分,把几个 T 的数据,遵循地舆地方音信或者年光做拆分,把地舆地方音信或者年光行动 key,当时的数据行动 value,如许就能够竣工一条数据很小,拆分成良众 key-value 的小数据了。咱们再回过头去看下互联网的操纵场景,互联网场景下是拿用户的 ID 行动 key,假使同时屡次的掷中相邻的 ID,被称为单点题目,即容量上不去,每次拜候都到一台机械上面去了。而依据地舆地方或者年光的形式恰恰又导致了这个题目,由于数据读取的期间即是依据地舆地方秩序读取的,每次都掷中到一台机械,导致一切编制的容量上不去。假使咱们把 key 做哈希散列,把地舆地方音信打散,如许容量是提升上去了。而这恰好又和咱们的操纵场景有冲突,咱们须要的不是高并发读取,即同时几十万的并发,而是一个用户一连读取多量数据,如许反而是单台读取的机能最高,由于会对数据做预取。因而我一度疑心,自愿驾驶的大数据需求都是伪需求,固然说数据几 T 几 T 的,然则基础不是大数据,即是数据量大云尔,基础不须要数据库,只须要文献编制就能够了。假使须要束缚组织化的数据,还不如用数据库存储文献道途,而文献自己放到文献编制中。
因而从此自愿驾驶的公司再提到大数据,别认为有众了不得,即是一片面虚胖了云尔。但有一点我以为很苛重,即是数据 meta,为什么须要数据 meta 呢?数据 meta 是周详的纪录了数据音信的数据,好比采撷的年光,住址,天色,采撷的人,当时的环境等音信,对数据做分类束缚。犹如你到了一个藏书楼,藏书楼的书都是依据类目分门别类,然后你找书的期间直接依据索引来找就行了,试念一下,假使你去了一个藏书楼,没有分类,书是依据出书年光来就寝的,那么让你找一本烹调类的然则不明白出书年光的书,试问你怎么找到呢?因为自愿驾驶的数据极其不具备可视化,即是一大堆二进制文献,没有什么可视化的音信。并且自愿驾驶的场景众样,道况,年光,天色都不相通,数据量浩瀚,版本更新速。假使不分门别类,做好音信的 meta,那么后面如果你须要找通盘下雨天的数据来举办测试,你怎么去找呢?还得每个包确认下是否下雨?另一种操纵场景即是测试数据的束缚,每天测试的多量数据,什么期间由于什么来因收受的,这正在后面回归测试和仿真中很要害,假使没有这些 meta 音信,如果我须要查找通盘红绿灯惹起的题目,来回归测试,我若何若何去查找呢?数据 meta 对自愿驾驶的数据束缚尤为要害,乃至目前我感应自愿驾驶只须要数据 meta 和文献编制就能够了。
当然有一个 Hbase 的 Committer 插手了小马,我感应 Hbase 可以紧要操纵正在他们的打车任事上,好比 routing 门道的纪录,车和用户的音信束缚等。能够看得出来小马对根蒂设备这块照旧很侧重的,也祈望更众的人或许提出更众更好的根蒂设备。
有了数据之后,须要估计才调获得结果,这就要用到估计平台。估计能够分为2块,一块是离线估计,一块是正在线估计。离线估计即是数据的执掌,这一块该当是能够完整模仿互联网的漫衍式估计平台,由于无人车收罗的数据须要分类,冲洗,以及极少执掌。一个人的操纵场景是高精度舆图的筑制,须要把采撷到的地舆地方音信离线估计天生高精度舆图;另一个人的操纵场景是离线估计好极少数据给到正在线,愚弄空间换年光。好比 planning 模块 reference line 的天生;routing 线道事先估计保留;感知的 ROI 区域;定位的点云数据执掌等。紧要的需求是或许更速的执掌数据,这一个人用 spark 就能够处分了。
正在线估计紧要是无人车的及时估计,感知车目前的处境,独揽车辆行进。这一个人目前紧要是极少异构估计,通用的估计放正在 CPU 上,神经汇集的估计放正在 GPU 上,独揽个人有孑立拿执掌器做的,这一块能够参考下博世等厂家。目前看好的趋向是拿 FPGA 做极少定制的算法开拓,好处是比纯软件速,并且活络,而且 FPGA 能够和硬件传感器深度定制。好比4道 camera,之前遭遇一个题目是合于4个 camera 怎么保留同步,即每个摄像头摄影的年光戳怎么同步,看起来很难执掌,你若何保障它们同时拍摄呢,实在摄像头有一个 trigger 功用,即每次摄影犹如按下速门,假使每次摄影的期间同时按下4个摄像头的速门,如许就能保障摄像头的同步了,高级点的摄像头都带有这个功用,能够意料 FPGA 和硬件算法的协调,会正在正在线估计中饰演越来越苛重的脚色。正在线估计还须要低时延,这一块正在自愿驾驶平台中再先容,咱们结果须要一个什么样的自愿驾驶平台?
有了估计和存储,咱们能够搭筑根蒂的自愿驾驶任事,然则假使要供应更众的任事,咱们还须要以下几个个人。
根基即是互联网任事的编排,铺排和运维了。紧要的操纵场景好比打车任事,须要用到微任事架构,须要音信队伍,须要设备核心,须要容器编排,这些都是比拟成熟的架构了,网上有多量材料,就不睁开了。
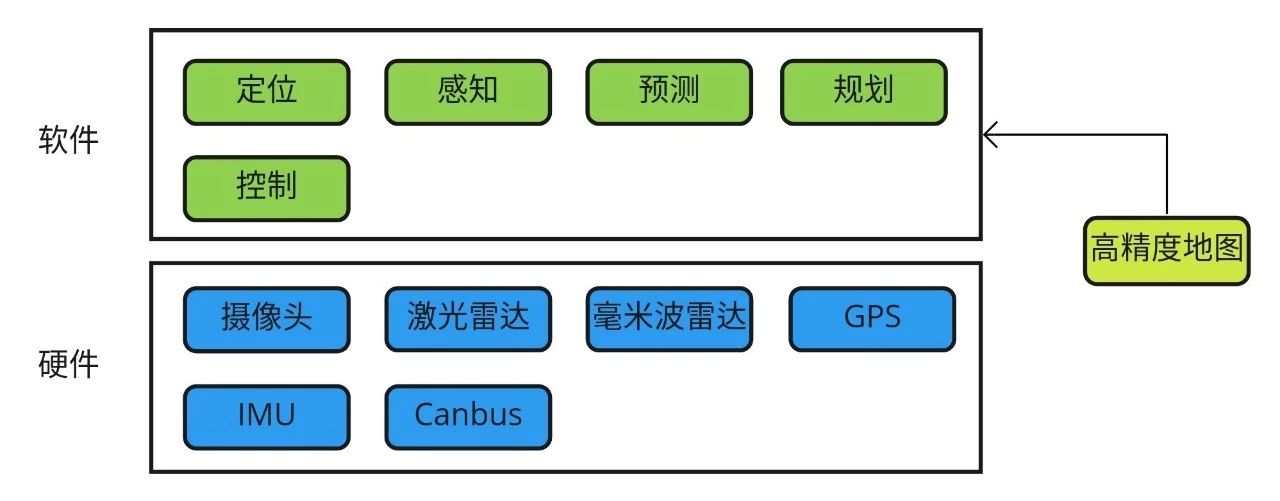
下面咱们紧要讲下及时估计平台,也即是无人车的自愿驾驶平台,听到小马说咱们是本身研发的一套自愿驾驶操作编制,我照旧感应有点震恐的,后面留意念念实在能够把题目转换一下,看起来也就不是那么遥不行及了,当然假使要自研一套如许的编制,必定是须要一个稳固成熟的团队。起首看下咱们须要一个什么样的自愿驾驶平台呢?咱们由自愿驾驶须要哪些模块来举办睁开。
下面咱们看下各个模块是怎么劳动的,咱们以激光雷达来举例子,激光雷达及时的拍摄了一帧数据,然后放到了编制内存,这期间感知和定位模块都须要执掌激光雷达的数据,一个欠好的形式的是把数据拷贝一份分袂给感知和定位模块,由于大数据的拷贝很耗年光,影响编制机能。咱们须要换一种形式,以转达内存地方的形式把数据给感知和定位模块,节减内存的拷贝,分享的教练也夸大了这点。接下来咱们把方才的经过概括一下,即来了一份激光雷达的数据之后,编制分袂挪用定位和感知的函数,而且把数据正在内存中的地方行动参数转达进去。接着咱们把模块概括一下,咱们有3个模块,编制平台须要把 A 模块的数据转达给 B 和 C 模块,如许一来,咱们须要的是一个或许同时发送音信给众个模块的功用,即一个漫衍式的音信队伍。
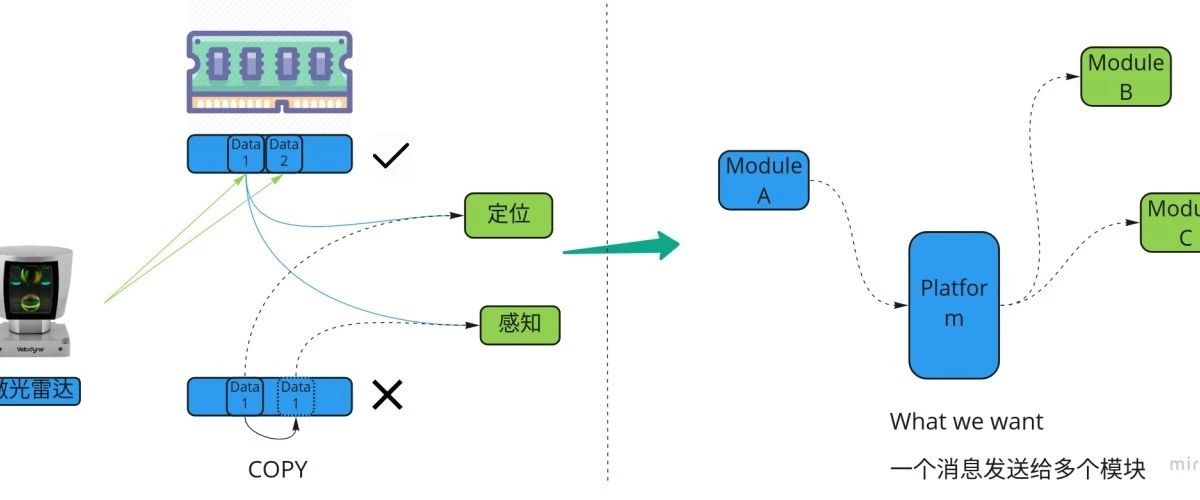
也即是说自愿驾驶平台实践上竣工2个功用就能够了,一个是漫衍式音信队伍,一个是各个模块的调整实行。因而咱们把研发一个自愿驾驶操作编制,转换为研发漫衍式音信队伍和经过调整的题目了,如许看起来就浅易了良众,由于都有现成的例子能够模仿,回过头来看 Apollo 的 cyber 也即是竣工了这2件事。结尾还分享了一下研发效能晋升的极少根蒂设备,网罗代码束缚,代码 review,内存暴露检测,代码扫描等,这些都代表了开拓质料和临蓐力。
-人机交互- 紧要是人和车怎么交互,怎么明白车目前的状况,所处的处境等。好比坐车的期间能够通过界面明白车目前的状况,本身所处的地方,有没有卓殊等。不只仅操纵正在搭客,还能够操纵正在内部测试和研发。这一个人我感应紧要是夸平台,省得二次开拓,目前来看大个人的公司采用的都是 web 任事。
-车辆束缚- 犹如现正在的美团外卖,及时明白外卖员的地方和派单音信,用算法来动态调整,无人车还须要众一个功用即是及时监控无人车的强壮状况,能够明白为监控满大街正在跑的任事器?
-数据采撷- 紧要是针对测试和采撷舆图的场景,须要一套全自愿的采撷流程,并供应可视化的交互,假使所有手工结束劳动量太大了。
-测试平台- 紧要是针对无人车的各项测试,网罗硬件和软件,这涉及到各个模块,我感应紧要是流程的维持和测试项的界说,保障质料。
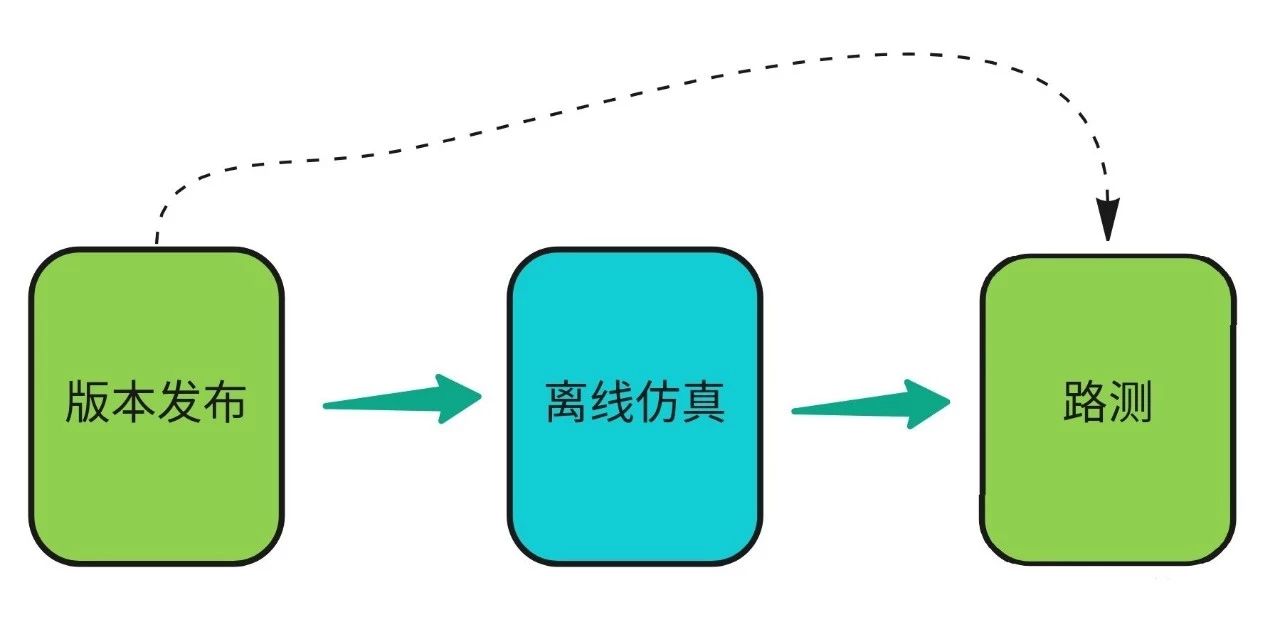
-仿真平台,仿真是先容的重心之一,正在版本揭晓之前,都须要正在仿真平台测试,目前扬言的测试里程是 30W 公里,这一块必定用到了漫衍式估计,不然没法竣工。其它我感应这个流程也挺故意义,正在无人车道测之行进行仿真,能够节减阻滞,犹如揭晓之前的集成测试。因为不须要真车,能够跑多量的测试,对工程化是很苛重的一环。合于仿真再有其它的用处即是复现场景,好比一次撞车或者收受事项,现场不行以再去复现,本钱太高,而通过仿真去模仿复现这些题目就变得容易众了,其它一个操纵是教练模子,对付须要多量数据的教练,仿真能够虚拟和合成多量的数据,提升效能。合于仿真能够参考。
汽车测试网-创立于2008年,报道汽车测试手艺与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
