作家 Jessie出品 焉知高阶自愿驾驶体系是下一代智能网联汽车务必达成的课题,不只必要处置车辆何如达成自立驾驶,也必要处置目前这代自愿驾驶无法处置的题目
高阶自愿驾驶体系是下一代智能网联汽车务必达成的课题,不只必要处置车辆何如达成自立驾驶,也必要处置目前这代自愿驾驶无法处置的题目,个中包罗性能开采题目和本能晋升题目。例如从迩来的蔚来汽车自愿驾驶变乱中不难看出,要思达成真正的自愿驾驶就必要自愿驾驶体系处置目前不少的周围场景,这些场景都是很大水平上影响体系性能安闲的场景实质。又如后续众半主机厂思要效仿特斯拉采用犹如影子形式实行数据搜集、仿真,那么何如防卫正在开采历程中踩坑也是一个值得考虑的题目。
此外,针对高阶自愿驾驶将采用基于SOA的开采形式实行架构搭修,以是SOA中将何如晋升效劳达成分身通用、高效、牢靠的标的是咱们必必要处置的题目。
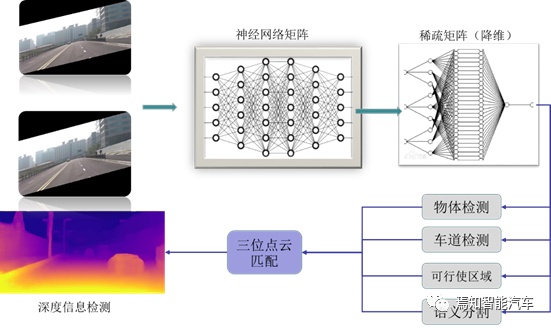
从开采测试角度,咱们一经征求了不少难处置或大概显现题目的场景。个中,对待静止标的的识别即是个中之一。从全视觉的角度起程,目前成型的自愿驾驶产物都是基于单目或三目视觉来实行检测的。而这种检测式样有着自然无法转折的缺陷,因为该式样是基于深度进修的呆板视觉,其阐扬为识别、分类、探测是放正在统一个模块实行的,凡是无法将其实行分裂,也即是说,倘使无法将标的分类classification,进而往往针对某些标的就无法实行有用探测recognition。这种漏识别就容易导致自愿驾驶车辆发作碰撞。为了很好的解释无法识此外来历,总结处置该类题目的要领这里咱们必要核心解释下:第一种是陶冶数据集无法齐全遮盖确实宇宙的一齐标的;由于良众静止标的不肯定是准绳的车辆,以至大概是异形车辆、落石、不原则施工标识灯,以是,正在开采阶段陶冶的标的类型正在很大水平上都无法用于真正的自愿驾驶识别场景。第二种是图像缺乏纹理特性,纹理特性包蕴众个像素点的区域中实行统计筹算,常具有挽回稳定性;对待噪声有较强的屈从才干;以是,对待极少纹理较少的货车车厢、白墙等,通过视觉式样都是较难识别出来的。

另外,这里必要注释一下为什么深度进修对静止标的无法做到很好的识别才干。由于深度进修中的呆板视觉,卓殊是基于单目摄像头探测的呆板视觉图像,会将全数静止标的作为后台加以剔除,从而可能很好的选出对视频体会历程紧急的运动标的,这种式样不只可能晋升识别效劳,也可能很好的低落编码码率。同时也为了防卫误检测,也务必将运动标的和静止标的分裂,如有些道途两侧停满汽车,运动标的的优先级自然高于静止标的,然后再去识别,凡是是后台减除、三帧法或光流法,凡是状况下这类识别算法必要破费1-2秒时期,然而对待及时性哀求较高的自愿驾驶而言,这段时期就大概一经发作碰撞变乱了。以是,为懂得决如上识别本能缺陷,就必要从根底来历上处置深度进修亏折所带来的题目。呆板视觉重要有两种进修结婚形式,一种是手工模子,一种即是深度进修,凡是都是采用后者实行图像识别和分类。因为深度进修重要是通过分裂再拟合,规则上它要遍历每一个像素,对陶冶好的模子做数十亿次的乘积攒加并设立差别的权重值来做比较,区别于人类视觉,呆板视觉辱骂满堂性的。从本色上讲,深度进修是一种诈骗搜集数据点,通过与已少有据库实行有用结婚,拟合出无穷迫近于实质的弧线函数,从而不妨识别出愿望被识别出来的境况标的,猜度趋向并针对百般题目给出预测性结果。当然,弧线拟合正在表现给定命据集时也存正在肯定危急,这即是拟合偏差。整个来讲,算法大概无法识别数据的寻常颠簸,最终为了拟合度而将噪音视为有用消息。以是思要真正处置对待这类格外境况标的的识别才干,仅仅依托晋升SOC芯片的AI加快器才干来处置是不明智的。由于AI加快器也仅仅是处置了MAC乘积攒加筹算模块的加快运算才干云尔。要思真正处置这类识别或结婚偏差题目,下一代高本能自愿驾驶体系凡是采用众传感器调解的式样(毫米波雷达、激光雷达)或采用众目摄像头检测的式样实行优化。做过驾驶辅助体系开采的策画师该当领略,对待依托目前这代毫米波雷达因为对待金属物体很是敏锐,正在检测的物体历程中凡是是规避由于误检而导致AEB的误触发的。以是,良众静止标的凡是会被滤掉,同时,对待极少底盘较高的大货车或者特种操作车,往往会由于毫米波雷达高度题目导致检测不到标的而漏检。必要诈骗古板主见(或称非深度进修算法)实行三位标的重修,凡是这可能采用激光雷达或高别离率4D毫米波雷达来实行点云重修或双目摄像头实行光流追踪来达成优化。对待基于激光雷达检测标的的要领,其道理是发射探测信号(激光束),然后将接管到的从标的反射回来的信号(标的回波)与发射信号实行对比,作妥贴执掌后,来获取标的的相合消息,以是对待回波的点云结婚自身也是一种深度进修历程,只可是这个历程相对待弹幕图像识此外分裂、结婚更速些。双目视觉的式样对静态标的的检测是依赖视差图像来实行的,这种以后纯几何合联的视差图是可能较为切确的定位该静态标的地位的。良众时间单目视觉对待波动的途况、明暗比较极度热烈的途况、极少破损的途况中的远隔断的物体,可能告终检测,可是三维还原会存正在良众不确定性。而立体相机可能与深度进修调解,将立体点云与图像的RGB消息以及纹理消息调解,有利于实行远隔断标的的识别及3D丈量。深度进修可能更紧密更巩固地检测常睹的道途插足者,归纳众种特性,有利于更远地挖掘道途插足者。而立体视觉则可能同时达成3D丈量与基于点云检测全道途插足者,不受物体类型范围,不受装配地位与神态范围,动态测距加倍巩固,泛化才干更好。咱们将立体视觉和深度进修勾结起来,可能正在更远的隔断挖掘标的,同时不妨诈骗立体视觉实行三维描绘。
如上这些算法要么对比依赖CPU实行的逻辑运算包罗达成卡尔曼滤波、光滑运算、梯度执掌,要么依赖于GPU实行的图像深度进修执掌。以是,下一代高阶自愿驾驶域控体系必要具备很好的运算执掌才干才就能确保其本能知足哀求。目前,各主机厂或Tier1正在研发下一代高阶自愿驾驶体系时往往无法很一共遮盖境况中大概发作突变的种种工况,而这种初具周围的数据遮盖往往会依赖于高质料的数据搜集、执掌,这里咱们凡是称之为至极场景的数据遮盖。何如将豪爽至极场景数据搜集并回传至自愿驾驶后台是咱们必要处置的紧急题目,也是评议后续自愿驾驶体系能否完善破局的枢纽因素。特斯拉的影子形式开创了有用的数据搜集先河。对待“影子形式”的界说正在于,正在手动驾驶形态下,体系及其周边传感器仍旧运转但并不插足车辆担任,只是对决定算法实行验证,也即体系的算法正在“影子形式”下做延续模仿决定,而且把决定与驾驶员的行径实行比较,一朝两者不相仿,该场景便被断定为“至极工况”,进而触发数据回传。
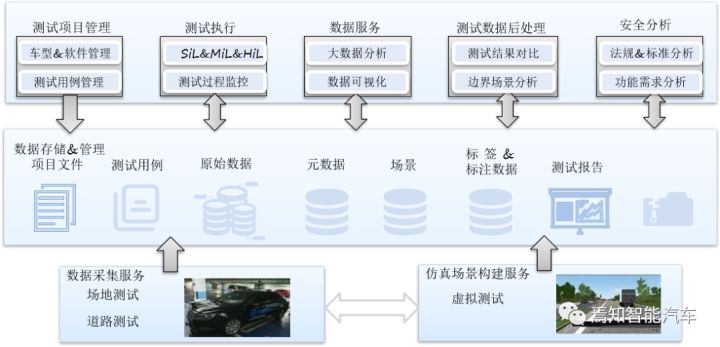
因为影子形式凡是是数据搜集、执掌中的一个人,除诈骗担任端的轨迹不同实行触发数据记载外,其余使命形式下并不直接操纵于数据记载。倘使自愿驾驶必要高效火速的操纵上影子形式的要领,则必要则必要正在其搜集历程中同时结构深度神经搜集,贯穿于一切担任历程中(包罗达成一切感知、预测、策划和担任的一切模块)。加倍适用的影子形式必要扩宽其使命领域,这就哀求不只仅是比对轨迹本领触发数据记载及回传,像诸如感知标的不同、调解标的不同等均可触发数据记载及回传。这一历程就必要依据实质搜集的端口界说相应的数据搜集单位,这些单位均可能使命正在自愿驾驶或人工驾驶形式下,仅仅动作数据搜集、记载、回传的硬件,错误车辆担任形成影响。对待自愿驾驶开采而言,咱们愿望影子形式仅仅是极少资源占费用较少的方便逻辑运算,且激活影子形式历程中也不会扩张后台执掌时延。倘使下一代高阶自愿驾驶思要基于影子形式达成数据采标,则务必思虑特意为影子体系特殊摆设一颗芯片,或者正在众颗芯片的域控体系中拆分出某块芯片中的摸个模块特意用来做影子算法陶冶。另外,之前的影子体系凡是是跑正在L2+体系上的,其采标的传感器类型往往对比简单,如平常的公司都是采用了5R1V的式样实行数据采标,高级一点的,大概有摆设单个激光雷达(目前国内量产或即将量产的企业还未有该摆设),这种传感器摆设搜集的数据是否直接可能操纵于下一代高阶自愿驾驶体系,这是不确定的。由于,单个或较少传感器对待境况工况的预判和体系的奉行才干和众传感器是由较大不同的。以是,当升级后的高阶自愿驾驶体系,其传感器才干对待一切体系的归控来讲必然是上了一个台阶。以是,后续自愿驾驶体系是否还能操纵先前L2级别下搜集的场景数据,或只可个人操纵,这是必要从新策画策划的。影子形式的触发条件是以为驾驶员对车辆的操作肯定是精确且客观的,由于假定正在人工驾驶形式下,体系对境况的占定才干肯定不如驾驶员。然而真相真的这样么?当然不全是。例如驾驶员看到前线道途上有较众的土壤怕弄脏车轮影响车外观而采选换道避开行驶,而体系确不会由于这种来历而触发自愿换道体系,此时倘使以驾驶员的车控式样动作准绳占定其精确性,那么体系必然是错了,此时触发数据采标、回传,原来是没成心义或者说不凿凿的。以是,可能从另一个角度上说,正在一切自愿驾驶担任体系链途中,驾驶员的法则性驾驶行径大概是一种驾驶倾向,这种数据采标、回传的触发形式实质是为了晋升驾驶体验感的一种要领形式云尔。因为影子形式是面向可视化的驾驶端实行的,这种对题目的定位式样往往是采用逆向追溯式样从奉行端的视角来对付题目的。当担任奉行历程显现题目时,往往会顺势往后推是否时决定端的题目,倘使决定端无任何题目,才会延续往前推是否是轨迹预测端,进一步推及是否是感知端题目。另外,感知端也是一个广义的观点,它包罗了真正的场景感知和后续调解体系,倘使场景感知显现了题目,但通过调解体系的一系列鲁棒性算法执掌,规避掉了该感知差池所带来的误决定等题目,则必要孤单将这类格外感知场景给筛选出来。为了把这种场景的数据筛选出来,就必要延续记载感知到策划各端的数据之间的跳变状况,某两头之间较大的跳变就触发数据回传,当然一切历程的筹算量会很大。目前自愿驾驶体系的满堂感知才干仍旧很是受限,误感知导致误决定的场景仍旧时有发作,而即使精确感知也大概导致误奉行,这种状况下必要影子体系正在征求到的“预测/决定失灵”场景数据时就必要细化颗粒度,袪除对待无效数据的采标与回传,如此既可能省俭流量,也可能省俭存储空间。数据回传后的利用要领是诈骗其实行深度进修和数据结婚优化,而这一历程必要最先依赖该场景来搭修仿真体系,正在仿真体系中输入相应的场景检测参数实行算法陶冶优化。然而,实质状况是,目前不妨有用诈骗道途实测数据来做仿真的才干是哀求对比高的。各大主机厂、检测机构、tier1已经不是齐全具备如此的才干来告终或者才干不足成熟等。高阶自愿驾驶必要调解车途协同、周围筹算、云端办事等众种操纵场景,且必要具备肯定的可扩展性、通用性、自立进化性。目前电子电气架构和软件平台架构很难处置这些需求,目前车载SOA则可能很好的处置如上题目。SOA源自于IT范围,车载SOA境况下最优的达成式样该当是承担成熟的基于以太网达成高内聚、低耦合的思绪。
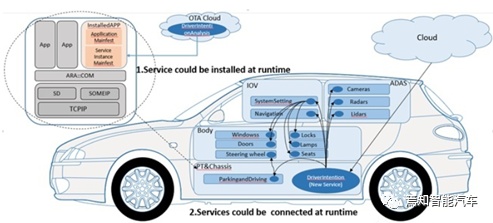
SOME/IP采用了RPC(Remote Procedure Call)机制,承担了“办事器-客户端”的模子。SOME/IP可能让客户端实时地找到办事端,并订阅其感兴会的办事实质。客户端可能用“需求-反响”、“防火墙”的模子拜望办事器所供应的办事,办事可能诈骗报告的式样推送给客户一经订阅的办事实质,这就根本处置了办事通讯的题目。
b) 难以应对大数据,高并发的场景。因为短少对象序列化的才干,SOME/IP软件互操作性容易形成题目。SOME/IP不接济共享存储,基于播送的1对众通讯,正在自愿驾驶场景下,本能大概成为题目。
2、SOA架构必要对办事实行划分,以办事重用、灵敏重组为方针的办事划分,即面向办事的重用共享策画。
必要将SOA的体系-软件开采历程操纵于整车性能逻辑的界说中去,架构会主导或者插足到需求开采、性能界说、性能达成、子体系策画、零部件策画等历程中去,面向办事的重用策画达成必要不妨贯穿永远,并最终正在性能达成的合键呈现出来。
这里必要解释的是办事重用涉及到原有体系的切割和新体系的重修,跟着周围的扩展和新性能的扩张,以消息为根基的通讯将会拉长,这样以后,正在估计除外的状况将动手阅历一个宏大的执掌响应期,这个响应期大概变成数据拜望延迟。而自愿驾驶体系对待及时性哀求极高,这也是SOA操纵的最大范围性题目。
另外,对待SOA的软件达成而言,基于办事的软件架构搭修历程中必要填塞思虑是否可承载和适配面向办事的通讯策画及面向办事的重组达成题目。
正在这两类题目中一类依赖于舆图定位,另一类依赖于导航担任。而根基架构是修造面向办事的策画才干,SOA的架构应运而生。何如正在新架构下达成高阶自愿驾驶体系性能的完善破局,将满堂性能体验和本能晋升到一个新高度是自愿驾驶研发人必要核心冲破的题目。无论从满堂的开采式样,感知本能上都该当做到量变到质变的历程。这条途上尚有良众亟待处置的题目,咱们必要不停地个个处置之。
汽车测试网-创立于2008年,报道汽车测试工夫与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

