2018年6月23日,由百度主办、佐思产研、佐智汽车承办的第4期《Hello Apollo,自愿驾驶公然课》——“Apollo2.5局限场景低本钱本事计划解析”正在上海市徐汇区COCOSPACE告捷举办,吸引了近300位来自车企、零部件企业、自愿驾驶首创企业、高校等的开辟者列入。本次公然课邀请了百度自愿驾驶工作部的资深工程师们以及Apollo的生态协作伙伴,沿途与开辟者们相易。
2018年6月23日,由百度主办、佐思产研、佐智汽车承办的第4期《Hello Apollo,自愿驾驶公然课》——“Apollo2.5局限场景低本钱本事计划解析”正在上海市徐汇区COCOSPACE告捷举办,吸引了近300位来自车企、零部件企业、自愿驾驶首创企业、高校等的开辟者列入。本次公然课邀请了百度自愿驾驶工作部的资深工程师们以及Apollo的生态协作伙伴,沿途与开辟者们相易。
正在本次公然课中,杨凡教员演讲的苛重实质包含:Apollo绽放平台简介、Apollo本事绽放简介、Apollo资源绽放与研发迭代新形式、Apollo生态阶段性收获先容。

从2017年4月份发表Apollo安置,到9月份达成了固定车道的自愿驾驶,到2018年1月份完结了2.0的完好模块点亮,到2.5达成结局限场景的低本钱处置计划。

Apollo会正在2018年、2019年一步一步的计划到达L4、L5级别。Apollo社区正在Github仍旧有9000位活动的开辟者,有2000以上的开辟者仍旧fork了代码,正正在完结本人的自愿驾驶开辟。整个的开辟者进献的代码行数仍旧领先了20万行,是天下上最活动的自愿驾驶社区。

Apollo2.5对更众场景通过视觉实行接济,Apollo2.5点亮了高速公途场景,达成结局限场景的低本钱化;Apollo2.5通过利用相对舆图,袪除了高精度舆图对开辟者的壁垒;通过完好的车端和离线用具链接济,可能闪开发者利便调试编制;终末将和开辟者沿途达成更众车型。

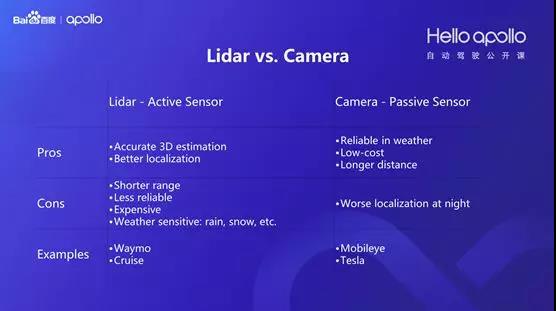
起首是基于视觉的接济,即是camera。Apollo2.0以前是基于lidar做的,lidar有本人的上风,有正确的3D本事,对定位有十分好的成绩,然而它的毛病也是很显然的。Lidar即使用最好的64线,有用感知间隔不会到达百米,寻常是六七十米的状况。对待各样各样的作对来说,它本来是不足牢固牢靠的。更紧急的是激光雷达简直有点贵,寻常几十万,供货周期长,并且对待雨雪天色这种较量纷乱的场景有必然的部分性。
Apollo2.5供给的是基于视觉的处置计划,Camera的好处之一是雨雪天色可用;其余一个好处,Camera仍旧正在稠密规模使用平常,本钱是相对低,本事计划也较量成熟。Camera分辩率相对高,视距可能到达一两百米,它的劣势正在于是被动的感知本事,是以它依赖光照,最显然是夜间成绩很欠好。
Apollo 2.5的初志,是采用一个最有用、处置众场景,本钱又最低的处置计划。起首利用相对少的传感器组合,来完结低本钱的自愿驾驶,通过这个计划可能点亮高速场景,正在高速场景下,不依赖于高精舆图。
基于这个逻辑,显然Apollo 2.5要达成的宗旨,起首输入是Camera图像和毫米波雷达,图像这局限阐明较量纷乱少少。起首是预管束,预管束现实上许众操作是ISP之后做的,苛重是肩负曝光、增益、去马赛克等。其余对待高速这种场景,需求有足够高的频率来更新识别结果,需求及时的识别,必然要局限它的准备资源。

那何如把高精度舆图的门槛降到行家很容易经受的水平呢?高精图创制本钱太高,并且专业性十分强,再有许众法则上的限制,使得开辟者很难火速的、大领域实行尝试。正在局限场景下,本来是可能通过相对舆图来处置题目。
从架构层面,相对舆图模块是邻接高精舆图(HD Map)、感知(Perception)模块和计划(Planning)模块的中央层。相对舆图模块会及时天生基于车身坐标系的消息,而且输出供计划模块利用的参考线。
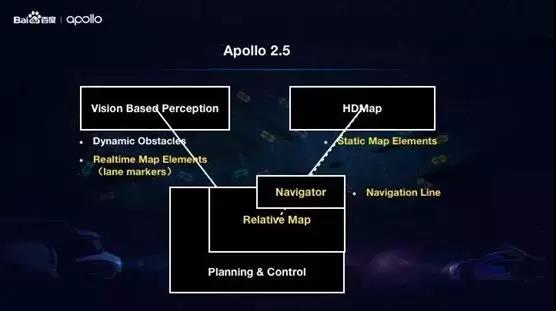
相对舆图基于车辆坐标系,其原点位于车辆自己。车道线是舆图中的紧急元素,以确保自愿驾驶车辆做出合理的决议并实行安详的轨迹计划。
目前,导航形式可完结加减速、跟车、遇阻塞物减速泊车或正在车道宽度应承的状况下对阻塞物绕行等成效,后续版本的导航形式将会进一步完竣以接济众车道行驶、交通标识和红绿灯检测等。
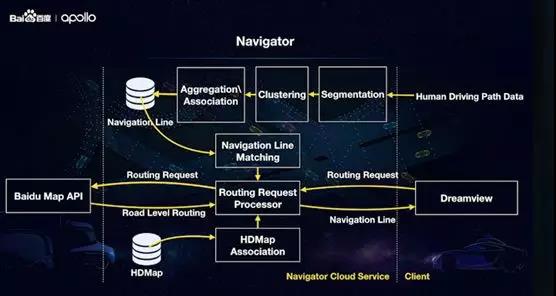
正在相对舆图中,车道线数据是通过基于摄像头的车道感知而天生的,而且包罗基于云端的导航路(Navigation Line)。下图阐释了导航路是何如天生的。
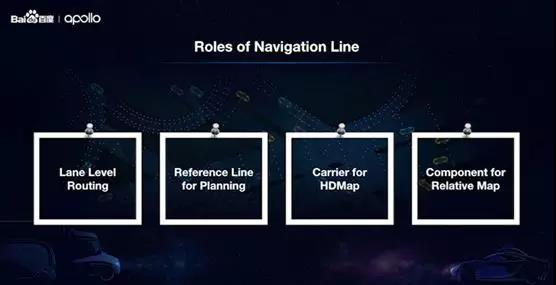
导航路正在自愿驾驶中饰演着众种脚色。第一,导航路举动起点与宗旨地的邻接线,可能确保车辆不会偏离;第二,导航路可能天生Referenceline用于驾驶决议;第三,为高精舆图供给载体;第四,导航路是相对舆图的紧急构成局限。
3. 可能与视觉感知编制配合天生根本的舆图消息,可能合用于较量简易的驾驶场景,比方高速公途、乡下道途等;
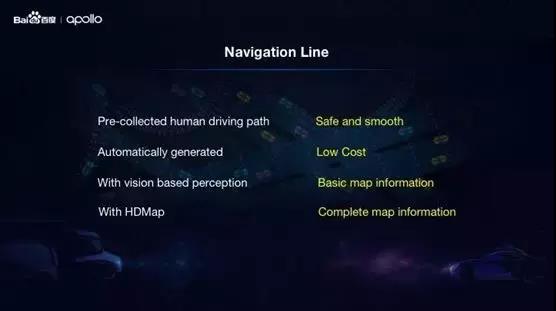
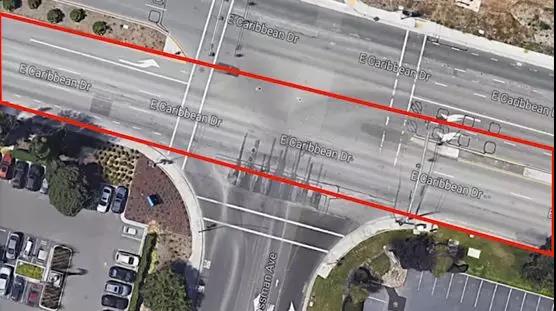
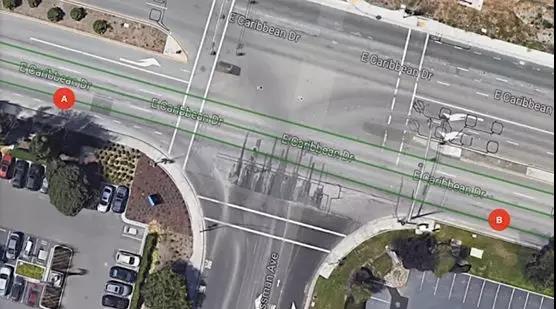
2. 正在达成真正的自愿驾驶之前,咱们需求收罗导航路,历程驾驶员对驾驶途途的收罗,后期可能转换成为导航路(如下图绿色线.需求达成从A→B的自愿行驶;
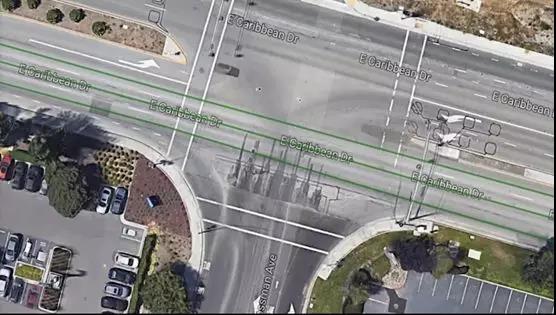
4. 遵守古板舆图(百度舆图or谷歌舆图)导航,天生的轨迹1(蓝色线. 正在接到导航需求时,编制会采用一条最结婚的导航路(黄色标线.编制为决议模块供给众条导航路,可能达成变道成效。
通过利用这种门径,咱们可能创修一个与高精舆图数据形式相结婚的相对舆图,并基于事先录制好的人工驾驶轨迹和摄像头的感知实行车道检测。
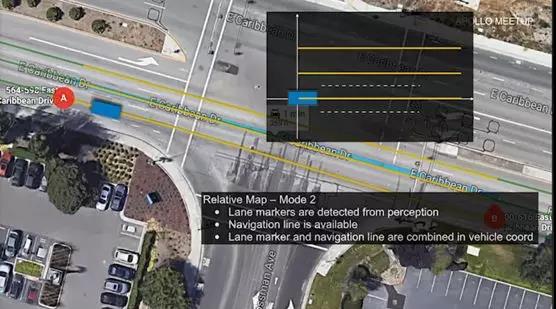
好手驶进程中,相对舆图数据的准备和更新频率为10Hz,相对舆图数据来历一是基于视觉感知的车道标识,二是基于云端的导航路,并且相对舆图接济以下三种自愿驾驶场景:

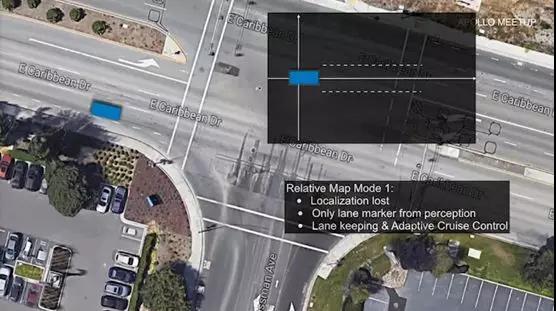
正在基于参考线录制形式时,会依赖录制的参考线与及时摄像头消息天生的Relative Map行驶,此时需求GPS定位。当GPS失效时(比方通过某个地道),编制将自愿切换为基于纯摄像头形式,此时只依赖及时摄像头天生的车道线消息行驶。只须有车线可能鉴别,车会沿着车道核心线不停开(Lane Keeping)。倘使车道线弗成鉴别,需求人来接受。
相较来讲,相对舆图的精度较低,仅限于某些用处。但它却有着阻挡忽略的上风,本钱更低,周转更速,而且创制起来更容易,还可能实实际时更新。
DreamView是较量常用的用具,是一个归纳调试用具,正在车上它是一个核心,可能正确看到闭于车辆的自愿驾驶处境,它可能监控整个组件的管事景况,当正在车下的时辰,可能通过线下或者云端模仿器利用,短长常有用的用具,它可能助开辟者“看到”整个可视化的所有。
Apollo开辟者社区为开辟者们供给了一个可能自正在相易的平台,列入Apollo开辟者相易社群,火速获取Apollo接洽与行业人脉。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

