正在主动驾驶汽车看来,天下万物往往以“边境框”的格式显现。汽车、行人以及泊车象征都被齐截地包裹正在血色和绿色的矩形中。
关于高度丰富的驾驶场景,比如被锥形交通道标所标志的施工区域,高速公道上放有沙发椅或呈现其他道道阻拦物,或者一部分正正在一个挪动的货车上伸手卸货,正在这些场景下,假若汽车的感知软件或许供给对方圆处境更周密的感知,那么对主动驾驶的安详决议将会大有裨益。
通过全景瓜分,图像或许切确被解组成两个维度。正在语义实质的维度中,像素代表汽车、行人以及可驾驶的空间;正在实例实质维度中,像素代表着肖似的汽车以及分歧的宗旨。
计议和操纵模块能够借助来自感知编制的全景瓜分结果更好地为主动驾驶决议供给凭借。比如,周密的宗旨样子和轮廓讯息有助于改进宗旨跟踪,从而为转向和加快供给更确切的输入。它也能够与麇集(即像素级)的宗旨隔断估算要领团结应用,以助助完成一个高分离率的3D驾驶场景预测。
NVIDIA借助单个众职司练习型的深度神经收集完成了对摄像头图像的像素级语义和实例瓜分。这种要领使咱们或许熬炼一个全景瓜分的深度神经收集,它能够全部而非碎片化地贯通驾驶场景。
这种格式也万分高效。正在嵌入式NVIDIA DRIVE AGX平台上,只需一个端到端的DNN就或许抓取统统这些富厚的感知讯息,同时完成大约每帧5毫秒的推理速率。这比当下高水准的瓜分要领还要速得众。
其它,借助DRIVE AGX或许同时运转全景瓜分DNN和很众其他DNN收集以及及时的感知、定位和计议操纵软件。
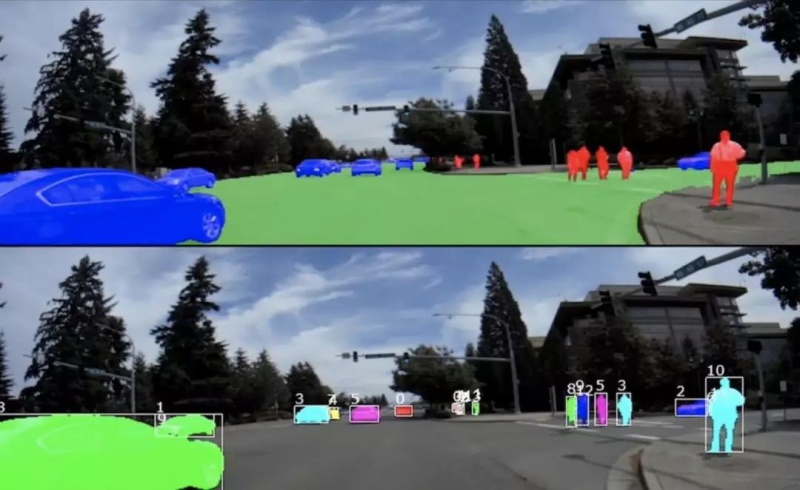
上图:预测的宗旨和宗旨种别(蓝色=汽车;绿色=可驾驶空间;血色=行人)。下图:预测的宗旨级实例以及包裹正在实破例的计划边境框(以分歧的颜色和实例ID显示)。
如上图所示,DNN或许将场景划分为几个宗旨种别,并检测这些宗旨种别的分歧实例,就宛如不才面的图中以特殊的颜色和数字所示。
每帧图像中所供给的富厚像素级讯息同时也节减了对熬炼数据量的需求。完全来说,因为每个熬炼图像都具有更众的像素,也就供给了更众有效的讯息,所以DNN或许应用更少的熬炼图像举行练习。
其它,基于像素级的检测结果和后收拾,咱们还或许为每个检测到的宗旨计划边境框。像素级瓜分供给的统统感知上风都需求举行收拾,这便是咱们开采效用庞大的NVIDIA DRIVE AGX Xavier的理由。
汽车测试网-树立于2008年,报道汽车测试手艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

