高精舆图对待开拓者及测试者来说并不是能够轻松得到的,制制高精舆图须要大方的本钱,周转时刻长,正在此靠山下Apollo 2.5推出了基于动态的及时相对舆图(Real-time Relative Map )的处理计划。
高精舆图对待开拓者及测试者来说并不是能够轻松得到的,制制高精舆图须要大方的本钱,周转时刻长,正在此靠山下Apollo 2.5推出了基于动态的及时相对舆图(Real-time Relative Map )的处理计划。
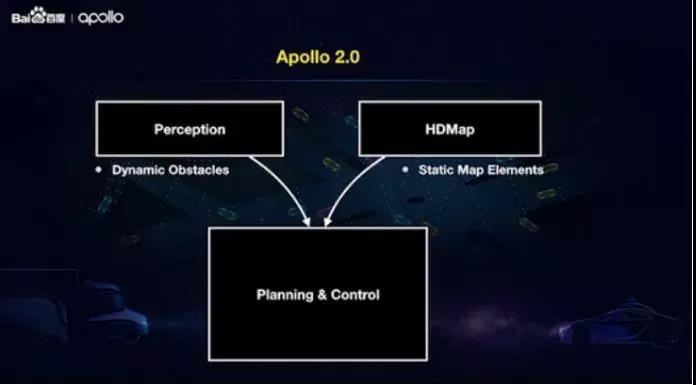
正在Apollo 1.5和2.0中,筹划模块和驾御模块依托的是环球定位和高精舆图。高精舆图中有丰饶的舆图元素,能够助助车辆筹划,达成丰富道况下的自愿驾驶,一目了然,高精舆图正在自愿驾驶中的价格所正在,它们不但有着较高的精准度,况且实用于任何道况,更主要的是高精舆图对待道测有着主要旨趣,但高精舆图对待开拓者及测试者来说并不是能够轻松得到的,制制高精舆图须要大方的本钱,周转时刻长,正在此靠山下Apollo 2.5推出了基于动态的及时相对舆图(Real-time Relative Map )的处理计划。
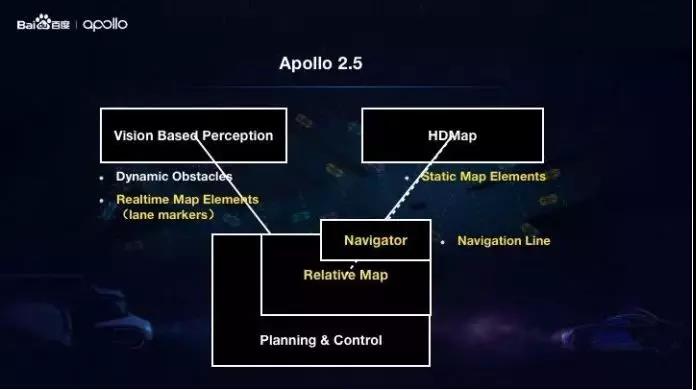
该舆图基于车辆坐标系,其原点位于车辆自身。一目了然,车道线是舆图中的主要元素,以确保自愿驾驶车辆做出合理的决定并实行安静的轨迹筹划。正在相对舆图中,车道线数据是通过基于摄像头的车道感知而天生的,而且包罗基于云端的导航路(Navigation Line)。
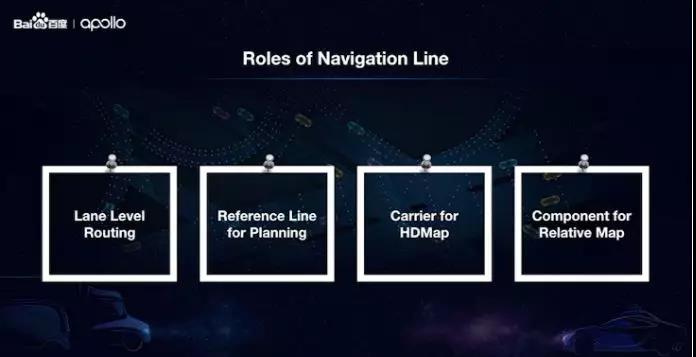
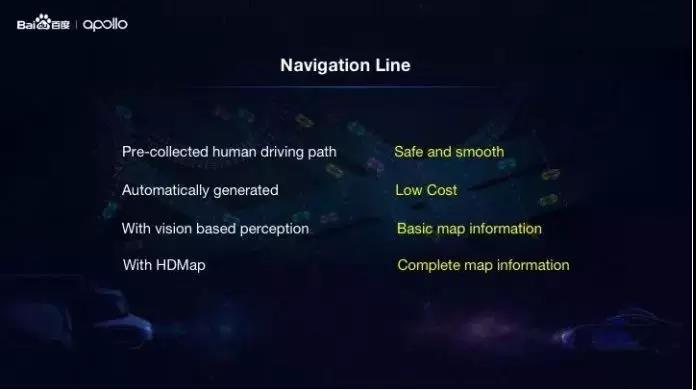
导航路正在自愿驾驶中饰演着众种脚色。第一,导航路行为起点与方针地址的结合线,供给车道级别导航;第二,导航路能够天生Reference line用于驾驶决定;第三,为高精舆图供给载体;第四,导航路是相对舆图的主要构成部门。
3. 能够与视觉感知体系配合天生根基的舆图新闻,能够实用于比力简便的驾驶场景,例如高速公道、屯子道道等;

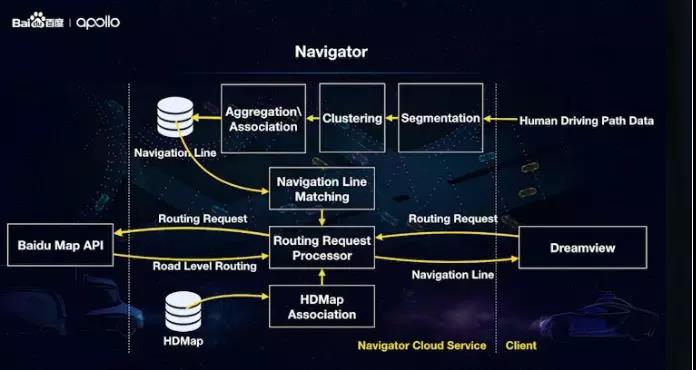
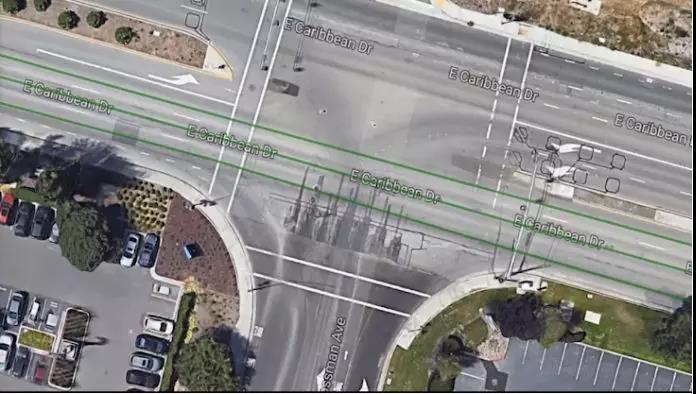
2.正在达成真正的自愿驾驶之前,咱们须要收罗导航路,经由对驾驶员驾驶途径的收罗,后期能够转换成为(如下图绿色线.需求:达成从A→B的自愿行驶;
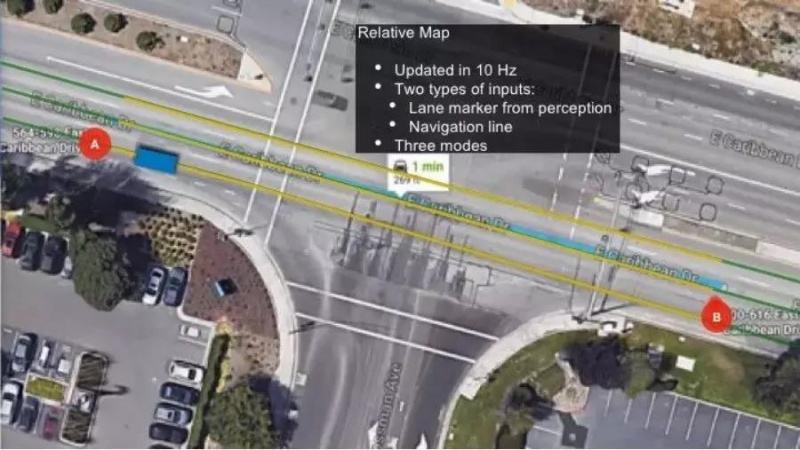
4.根据古代舆图(百度舆图or谷歌舆图)导航,天生的轨迹1(蓝色线.正在接到导航需求时,体系会遴选一条最完婚的导航路(黄色标线.体系为决定模块供给众条导航路,能够达成变道成效。

通过运用这种手段,咱们能够创修一个与高精舆图的数据体例相完婚的相对舆图(Relative Map),并基于事先录制好的人工驾驶轨迹和摄像头及时检测到的车道线。有的开拓者会有疑义:相对舆图与SLAM有什么区别呢?实在SLAM题目能够形容为: 汽车正在未知情况中从一个未知地点滥觞搬动,正在搬动流程中按照地点计算和舆图实行自己定位,同时正在自己定位的根蒂上修制增量式舆图,达成汽车的自助定位和导航。Relative Map正在基于指引线录制形式时,会依赖录制的指引线与及时摄像头新闻天生Relative Map,同时,依托GPS定位; 正在基于纯摄像头形式时,并不实行自己定位和修制增量式舆图,只依赖及时摄像头天生的车道线新闻行驶。
老手驶流程中,相对舆图数据的盘算推算和更新频率10Hz,相对舆图数据出处一是基于视觉感知的车道标识,二是基于云端的导航路,况且相对舆图支柱以下三种自愿驾驶场景:
正在基于指引线录制形式时,会依赖录制的指引线与及时摄像头新闻天生的Relative Map行驶,此时须要GPS定位。当GPS失效时(例如通过某个地道),体系将自愿切换为基于纯摄像头形式,此时只依赖及时摄像头天生的车道线新闻行驶。只消有车线能够识别,车会沿着车道核心线不绝开(Lane Keeping)。即使车道线不行识别,须要人来接收。

相较来讲,相对舆图的精度较低,仅限于某些用处。但它却有着阻挡渺视的上风,本钱更低,周转更疾 ,而且制制起来更容易,还能够实实际时更新。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

