写正在前面:自愿驾驶汽车正在真正贸易化行使前,需求履历大方的道道测试本领抵达商用条件。采用道测来优化自愿驾驶算法花消的期间和本钱太高,且盛开道道测试仍受到
自愿驾驶汽车正在真正贸易化行使前,需求履历大方的道道测试本领抵达商用条件。采用道测来优化自愿驾驶算法花消的期间和本钱太高,且盛开道道测试仍受到法则限度,十分交通前提和场景复现贫寒,测试和平存正在隐患。目前,自愿驾驶仿真测试曾经被行业遍及回收,
等,使得仿真测试知足自愿驾驶感知、决定筹办和支配全栈算法的闭环。目前席卷科技公司、车企、自愿驾驶计划办理商、仿真软件企业、高校及科研机构等主体都正在踊跃投身虚拟仿真平台的征战。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
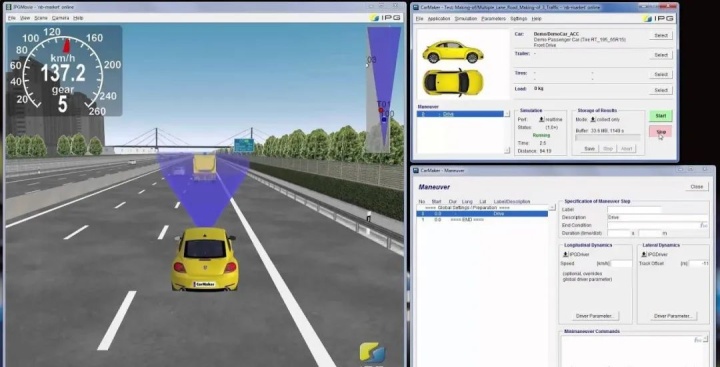
nal 研发的一款ADAS测试仿线月被西门子收购。PreScan是一个模仿平台,由基于 GUI的、用于界说场景的预惩罚器和用于践诺场景的运转境遇组成。工程师用于创修和测试算法的紧要界面席卷 MATLAB和Simulink。PreScan可用于从基于模子的支配器安排(MIL)到使用软件正在环(SIL)和硬件正在环(HIL)体系举行的及时测试等行使。
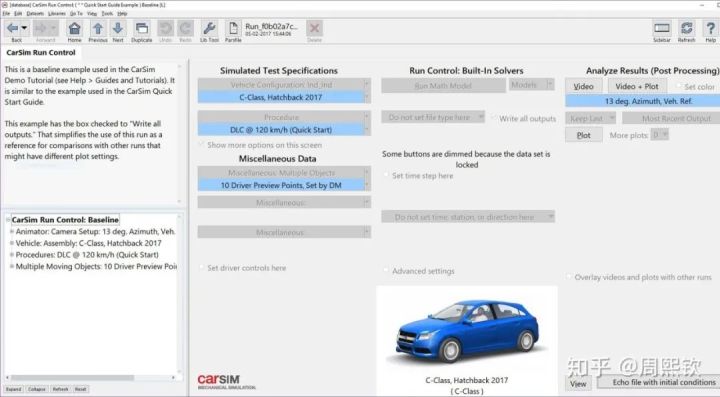
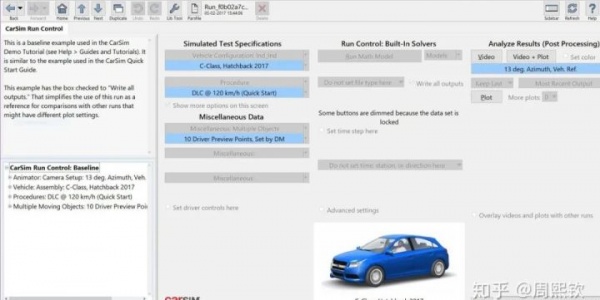
PreScan可正在开环、闭环以及离线和正在线形式下运转。它是一种盛开型软件平台,其敏捷的界面可相连至第三方的汽车动力学模子(比如:CarSIM和dSPACEASM)和第三方的 HIL模仿器/硬件(比如:ETAS、dSPACE和Vector)。
Prescan由众个模块构成, 行使起来紧要分为四个方法: 搭修场景、增添传感器、 增添支配体系、 运转仿真。
场景搭修:PreScan 供给一个健壮的图形编辑器,用户能够行使道道分段, 席卷交通标牌, 树木和制造物的根蒂组件库,席卷机动车, 自行车和行人的交通介入者库,修正气象前提(如雨, 雪和雾) 以及光源(如太阳光,大灯和道灯) 来构修丰盛的仿真场景。 新版的PreScan也支撑导入OpenDrive格局的高精舆图,用来树立愈加的确的场景。
增添传感器:PreScan 支撑品种丰盛的传感器,席卷理念传感器, V2X传感器,激光雷达,毫米波雷达, 超声波雷达, 单目和双目相机, 鱼眼相机等。用户能够依据自身的许要举行增添。
ink 树立支配模子,也能够和第三方动力学仿真模子(如 CarSim,VI-Grade,dSpace ASM 的车辆动力学模子)举行闭环支配。
运转实践:3D 可视化查看器首肯用户说明实践的结果,同时能够供给图片和动画天生效用。另外, 行使ControlDesk和LabView的界面能够用来自愿运转实践批次的场景以及运转硬件正在环模仿。
ntainer css-ym3v7r
ntainer css-xi606m style=text-align: center;
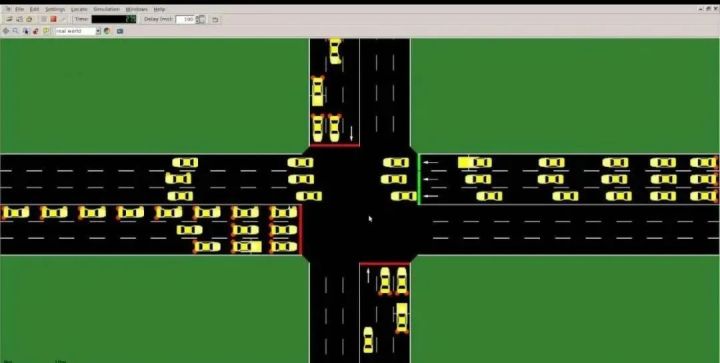
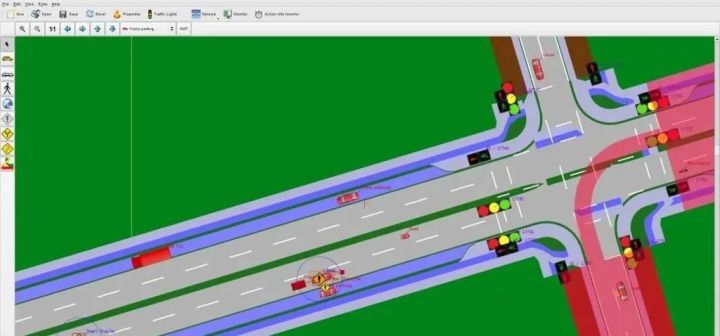
Vissim是德国PTV公司供给的一款寰宇领先的微观交通流仿真软件。Vissim能够利便的构修百般繁复的交通境遇,席卷高速公道, 大型环岛, 泊车场等,也能够正在一个仿真场景中模仿席卷机动车, 卡车,有轨交通和行人的交互行径。它是专业的筹办和评判都邑和郊区交通步骤的有用用具,也能够用来仿真限度急迫情景交通的影响,大方行人的疏散等。
TESS仿真体系是同济大学孙剑教养于2006年主办开荒的第一代道道交通仿真体系。自此之后,历经十年,孙剑教讲课题组针对中国同化交通流运转特点展开了100众项模子革新和仿真体系行使执行。TESS NG微观交通仿真体系所具有的紧要效用有:全交通场景仿真,众形式交通仿真,智能交通体系仿真,可视化评估,二次开荒接口,支撑3D场景映现等。同时,TESS NG能够与都邑交通大脑、交通支配体系、可计较道网(如OpenDrive,OpenStreetMap等)一体化整合,同时可与驾驶模仿器、BIM/CIM体系、智能汽车虚拟测试用具等整合告终跨行业行使。用户还能够通过定制化任事告终更众跨行业的行使。

ntainer css-xi606m style=text-align: center;
VTD (VirtualTest Drive)是德国 VIRES公司开荒的一套用于ADAS,主动和平和自愿驾驶的完善模块化仿真用具链。VIRES曾经于2017年被MSC软件集团收购。VTD目前运转于Linux平台,它的效用掩盖了道道境遇修模、 交通场景修模、气象和境遇模仿、 粗略和物理的确的传感器仿真、场景仿真处理以及高精度的及时画面衬着等。能够支撑从SIL到HIL和VIL的全周期开荒流程,盛开式的模块式框架能够利便的与第三方的用具和插件纠合仿真。VIRES也是遍及行使的自愿驾驶仿真盛开格局OpenDrive,OpenCRG和OpenScenario的紧要进献者,VTD的效用和存储也依托于这些盛开格局。VTD的仿真流程紧要由道网搭修,动态场景设备, 仿真运转三个方法构成。
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;正在传感器仿线Sim-One支撑通用类型或者定制需求传感器的众道仿真,知足对付感知体系算法的测试与演练,同时也支撑百般硬件正在环的测试需求。对付摄像头仿线Sim-One供给语义盘据图、深度图、 2D/3D围困盒等带说明的图像数据集,单目, 广角, 鱼眼等摄像头的仿真。对付雷达仿真,能够供给激光雷达点云原始数据, 带标注点云数据,识别物的围困盒等数据同时也供给方针级毫米波雷达检测物数据。

ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
ntainer css-xi606m style=text-align: center;

ntainer css-xi606m style=text-align: center;
百度Apollo仿真平台举动百度Apollo平台的一个要紧构成一面,一方面用来支持内部 Apollo体系的开荒和迭代,一方面为 Apollo生态的开荒者供给基于云端的决定体系仿真任事。Apollo仿真平台是一个搭修正在百度云和Azure的云任事,能够行使用户指定的Apollo版本正在云端举行仿真测试。Apollo仿真场景可分为Worldsim和Logsim。Worldsim是由人工预设的道道和贫苦物组成的场景,能够举动单位测试粗略高效的测试自愿驾驶车辆, 而Logsim是由道测数据提取的场景,的确响应了实质交通境遇中繁复众变的贫苦物和交通处境。Apollo仿真平台也供给了较为完竣的场景通过判别体系,能够从交通正派, 动力学行径和畅疾度等方面临自愿驾驶算法做出评判。Apollo也与Unity树立了团结相干,开荒了基于 Unity的的确感虚拟境遇仿线D的虚拟境遇,道道和气象的变革。比来, 百度也提出了一种新的数据驱动本领,用于自愿驾驶的端到端仿真:巩固自助驾驶模仿(AADS)。此本领使用模仿的交通流来巩固的确寰宇的图像,以创修肖似于的确寰宇衬着的照片般传神的模仿场景。的确来说, 倡议行使 LiDAR和相机扫描街景。将输入数据分析为后台, 场景照明和前景对象。同时,提出了一种新的视图合成技巧, 能够正在静态后台上改换视点。前景车辆配有计较机 3D模子。通过精准推测的室外照明,能够从头定位 3D车辆模子,计较机天生的行人和其他可转移主体, 并将其衬着回后台图像,以创修传神的街景图像。另外, 模仿交通流量,合成物体的安置和转移, 逮捕的确寰宇的车辆轨迹,这些轨迹看起来很自然而且捉拿实际寰宇场景的繁复性和众样性。

ntainer css-xi606m style=text-align: center;
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

