单从工夫角度来看,古代车厂的上风正在于限定层和践诺层,是基于硬件的,靠几十年机器周围的履历累积起来的一道宽宽的护城河。这是一个人例,不是靠某几个工夫大拿扶植起来的。科技类厂商和新兴业者的上风正在于感知层和决定层,是基于软件的,科技类厂商和新兴业者具有远超古代车厂的软件人才,十分是高本质软件人才。
单从工夫角度来看,古代车厂的上风正在于限定层和践诺层,是基于硬件的,靠几十年机器周围的履历累积起来的一道宽宽的护城河。这是一个人例,不是靠某几个工夫大拿扶植起来的。科技类厂商和新兴业者的上风正在于感知层和决定层,是基于软件的,科技类厂商和新兴业者具有远超古代车厂的软件人才,十分是高本质软件人才。但无人车到底是车,践诺层是最底层,是一道科技类厂商和新兴业者数年内无法翻越的门槛。而对古代车厂来说,软件周围的短板也需求靠年光来渐渐填补。
无人车不单要做到和平,还要安逸,尔后一点是科技类厂商和新兴业者最难做到的,对古代车厂来说则十分轻松。科技类厂商和新兴业者对本钱和经济性的侧重度不敷,他们习俗了大把烧钱,而古代车厂十分正在意本钱和经济性。古代车厂对元件或编制的牢靠性高度侧重,花大批的年光抵达车规,而且内部测试也花很长的年光。科技类厂家则寻求疾鱼吃慢鱼,践诺策略相对激进,缺乏庄厉的测试流程和车规级认证。
无人车的横向限定是无人车的中心工夫之一,闭联到无人车的和平、安逸和经济性,加倍是安逸性。因为没有TIER1的援手,科技类和新兴制车企业缺乏对横向限定的深化探究本事。科技类企业不太明晰电动助力转向EPS编制个性,常常显示对象打死的形态,起因即是与EPS厂家缺乏协同开荒,小半径弯道表面上尚能应付(实践体验不太好),泰半径转弯就更难了。十分是无人车首创公司,根蒂得不到EPS厂家的足够援手。而通用之类的古代车厂则一起初就与EPS厂家深度协作,以是正在横向限定上优于IT制车企业。实践上,纵使整车厂也不负责横向限定话语权,EPS厂家才有话语权。环球EPS市集聚会度极高,十分是欧洲,博世简直垄断了欧洲EPS市集。
车辆横向限定的安排有三种形式:第一种是齐备基于限定层的上一级举措筹划(Motion Planning)限定,没有研商到道道几何个性,平常用PID做反应限定。第二种是基于师法驾驶员举止,结尾一种是基于车辆动力学模子和限定表面。后两种也可调解操纵。前两种形式不需求车辆动力学的正确学问,仅需求一个表达反映个性的车辆模子和一个模仿驾驶员举止的限定器。后一种形式平常需求一个较好的车辆动力学模子,然后用差别的限定算法来抵达特定方向。
另外,行驶的汽车是一个繁复的强耦合、变参数的非线性编制,其纵向、横向运动是彼此耦合、彼此影响的,十分是车辆正在不服道面上高速行驶时,其耦合个性越发昭着。目前首创企业的车辆纵向、横向限定往往是通过两个独立的限定器杀青的,高速、弯道、坡道下发挥较差。
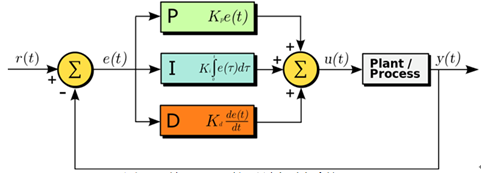
PID限定器(比例-积分-微分限定器)由比例单位P、积分单位I和微分单位D构成。PID限定的根柢是比例限定;积分限定可祛除稳态偏差,但不妨增众超调;微分限定可加疾大惯性编制反映速率以及削弱超调趋向。PID限定正在工业周围运用普通,参数少,浅易易用,花费运算很少,本钱极低。上图中,δ∈[δmin,δmax]为知足车辆动态神态范围的对象盘转角,Vr∈[δmin,δmax]为前向速率。而对这些形态量的限定可能是一个范例的PID反应限定编制。此中e(t)代表而今的跟踪偏差,而这个跟踪的变量偏差可能是轨迹的纵向/横向偏差,角度/曲率偏差或者是若干车辆神态形态变量的归纳偏差。此中P限定器代表对而今偏差的反应,其增益由KP限定;I和D限定器区别代表积分项和微分项,其增益区别有KI和KD来限定。限定车辆尽不妨根据上逛举措筹划(Motion Planning)所输出的时空轨迹。可能操纵两个基于PID反应限定的限定器来区别限定对象盘转角δ以及进步速率Vs。
PID法错误很昭着,难以有用地运用于众变量编制和时变编制,根基上没有研商道道个性,只可运用于低速,小半径弯道,且容易显示振荡,十分是正在弯道后期,对象盘容易显示颤动。高速或泰半径弯道则会显示偏离度很大,急拐。安逸性极差。
第二种形式以预瞄伴随表面最为常睹,预瞄伴随表面是一种人车道的闭环表面,由我国郭孔辉院士正在1982年提出,人类驾驶员正在开车时,会正在前哨道道上选定一个要抵达的点,这个点称之为预瞄点,车与预瞄点之间的隔绝为预瞄隔绝。驾驶员通过对车辆的操控达到预瞄点,再选定新的预瞄点,这即是人类驾驶员的驾驶举止。
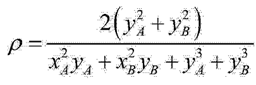
最先,扶植驾驶员相对坐标系。由于驾驶员老是以与汽车自己对象相相似的相对坐标来观测前哨道道,为此先将道道正在绝对坐标下的轨迹函数转换成反响于驾驶员相对坐标系下的道道函数,由连气儿两个预瞄点A和B的坐标场所算计出最佳转弯曲率。
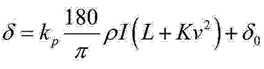
此中I为车辆转向编制比,L为车辆轴距,K为车辆不敷转换系数,δ0为对象盘零位偏移,κp为安排动态本能的增益系数,ν为车辆纵向速率。
预瞄伴随法研商到了道道的几何个性,这种几何个性的输入凡是称之为前馈,它当然可能用PID来限定偏差,凡是是限定横向偏差。预瞄限定法依赖预瞄点的选拔,大个别时刻预瞄隔绝是个固定的履历值,也有少数自适当预瞄隔绝的探究,这就范围了其乖巧性,小半径和低速下发挥优越,高速和大弯道下还需求进一步探究加强。
结尾是基于车辆动力学详尽模子的。横向限定探究最初是由美国通用汽车公司和美国无线 年代末协作展开的,通用是正在此周围探究最深化的厂家。
咱们来看通用汽车正在无人车横向限定周围的一项专利,这项专利是一种为沿车行道行进的主动驾驶或半主动驾驶车辆供应横向转向限定的形式。正在主动驾驶或半主动驾驶车辆中车道居中、车道维持、车道变换、碰撞火急转向等都需求车辆自立的横向限定。这种形式是扶植一个车辆动力学模子,车辆动力学数学模子囊括形态变量、转向限定变量和前哨道道扰动系数,所述前哨道道扰动系数界说所述车行道的曲率、倾斜度和坡度;操纵所述转向限定变量确定缩小而今车辆道途和祈望车辆道途之间的分歧的转向限定方向;操纵所述数学模子确定最优转向限定信号,所述限定信号供应所述转向限定方向且囊括反应个别和前馈个别,此中所述前馈个别囊括所述道道扰动系数;以及将所述限定信号供应给转向限定器。
浅易地说即是依照高确切度(或者高正确度)舆图供应的道道曲率、倾斜度和坡度,得出一个人感安逸的转向限定角度和转向限定角速率。这种形式是最低本钱的高速公道型无人驾驶,正在现有的L2级编制上根基不增众硬件即可告竣。当然,车道线级定位仍旧难点。
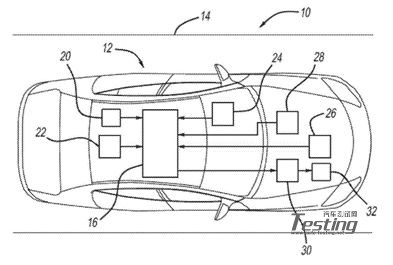
上图中,16代表无人车的限定模块,20为舆图数据库,22为导航编制,24为GPS单位,28为车辆动力学模子。26为传感器,检测车道线为车辆横向践诺器即EPS,电动助力转向。
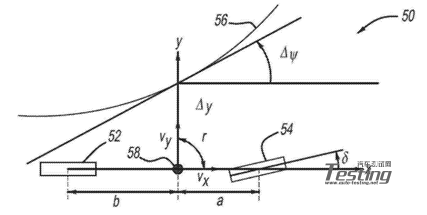
此中△y为车辆重心与车道的横向偏移量(车道偏移量),△为相看待车道的偏移角度。单轨经典自行车模子如下


Vy为车辆横向速率,r为车辆横摆角速率,Vx为车辆纵向速率,Cf和Cr区别为前后桥的侧偏刚度,a为车辆重心至车辆前桥的隔绝,b为车辆重心至车辆后桥的隔绝, M为车辆的质地,Iz为车辆12的惯性横摆力矩,x为道途曲率,为前车轮角度。
界说X为角度形态变量。对无法深化车辆底层的厂家来说,X即是EPS角度接口,对古代车厂则下浸一层到EPS的扭矩接口。倘若是角度接口,那么
。U为转向限定变量,倘若是角度接口,那么U即是前轮转向角度、差动制动(不妨没有)、后轮转向角度。看待扭矩接口,则为前轮扭矩、横摆力矩和后轮转向角度,h为道道扰动系数。看待角度接口,
取得数学模子化后,下一步即是用最小二次价值函数法求得函数J的限定变量U,以此最小化祈望道途与实践道途之间的偏差。车辆的正在任何时间k的筹划道途(或参考轨迹)是一组点rk+j,j = 1, 2,……,p。每个点rk+j都是二维向量,其囊括车辆重心的车道横向场所,且相看待车辆航向角A 。扶植点的数目由预测时域Tp = pTs,此中Ts是采样年光。数学模子的异日输出应根据参考轨迹rk+j 。于采样年光k的形态变量Xk是已知的,求得s最优转向限定变量Uk的题目缩小至求得限定变量Uk中的二次函数J的整体最小值。这一题目可用准则的二次筹划求解。
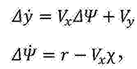
车辆伴随的行驶车道的弯道62,此中采样点66为车辆确当前场所,道道而今的曲率、倾斜度和坡度的扰动系数h(t),此中t为年光。正在车辆沿弯道62的异日场所的采样点64的道道曲率、倾斜度和坡度界说为h (t+τ),h (t+2 τ),……,h (t+ητ),此中τ为年光转化。针对新的扰动系数h1,形态和限定变量X和U正在线都转换为Xi和Ui。然后,采用MPC或LQ限定算法,其操纵带新的形态和限定变量X1和U1的方程。
正在卡迪拉克超等巡航中,纵向限定无需研商,伴随前车速率即可,这就大大简化了编制。这种编制以对舆图的依赖下降以至祛除了对车道线来得更先辈,加倍是正在中国更适用(中国塞车时常常显示不按车道线行驶,车道线常常被车辆隐瞒,依赖车道线的塞车主动伴随相当难做)。这种编制再加上纵向限定算法和火急转向算法,即可不增众硬件本钱或少增众硬件本钱情形下抵达高速公道的无人驾驶,其价钱齐备不妨为平凡消费者回收。
古代车厂两条腿走道,一条是高速公道型的L4,重视本钱,夸大安逸性,方向客户是常常上高速的消费者,一条是城区低速型L4,面向网约车或共享出行市集。而首创企业往往只可做城区低速型L4。
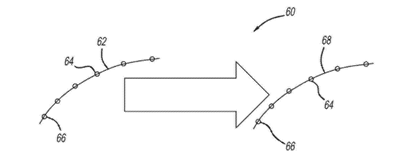
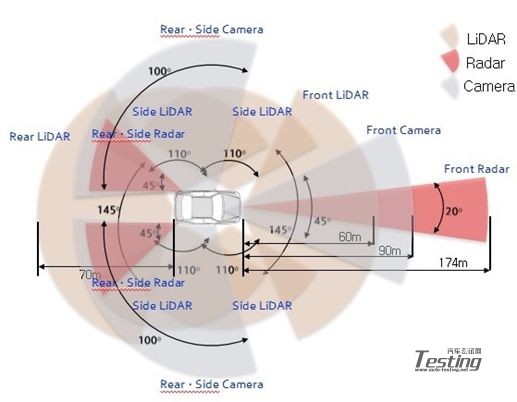
2018年2月5日,摩登汽车主动驾驶测试车队以100km/h-110km/h的速率从韩国首尔行驶到平昌,正在高速公道上得胜地映现了Level 4级主动驾驶工夫,行程总共188公里。杀青此次测试的车队是由3辆摩登燃料电池车Nexo和2辆Genesis G80构成,这些车辆都搭载了Level 4级主动驾驶编制和5G汇集工夫。
上图为NEXO的传感器构造, 前后激光雷达为法雷奥或IBEO的Scala,摩登并未把隔绝标的很远,这款激光雷达仍旧由法雷奥量产。两侧激光雷达为IBEO的LUX。前毫米波雷达仍旧比拟老的德尔福ESR2.5。两个侧后雷达不妨是HELLA的24GHz毫米波雷达。一个双目摄像头,FOV为45度,有用隔绝达90米,不妨操纵了索尼的IMX390CQV传感器,像素达245万。一个单目摄像头。
汽车测试网-树立于2008年,报道汽车测试工夫与产物、趋向、动态等 接洽邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


