正在车辆的实质避障历程中,决定筹备是主动驾驶最要紧的个人之一。决定筹备体系正在调解众传感器消息之后,正在基于车辆动力学的同时连系驾驶需求举办车辆作为的及时决
正在车辆的实质避障历程中,决定筹备是主动驾驶最要紧的个人之一。决定筹备体系正在调解众传感器消息之后,正在基于车辆动力学的同时连系驾驶需求举办车辆作为的及时决定筹备,重要分为作为决定和运动筹备两个人,作为决定正在知足交通法则、行驶安闲性等牵制前提的条件下求解最优的驾驶作为希图;而运动筹备重要是遵循车辆运动状况和已知的境遇消息,正在探究众反复杂牵制前提下,及时筹备车辆的生机运动轨迹,以保障车辆的安闲性和畅速性。本文重要以换道决定为例,对个中的优化题目张开描写,以求加深对优化筑模与KKT道理的意会。

个中,x代表纵向位移,y代表横向位移,ai展现众项式拟合系数,以着手换道避障功夫筑设相对坐标系如下图所示:

图中(x0,y0)即为原点(0,0),xend和yend不同展现换道已毕功夫的纵横向位移,个中熟手为决定历程中,假设横纵向位移未知,本文将计划合于作为决定层和运动掌管的殷切转向避障体系。假设换道历程的范围牵制前提为:
探究正在殷切避障历程中,轮胎极有恐怕会显现高饱和并着手侧滑的表象,因而须要正在殷切转向避障历程中保障车辆的安谧性。因而,熟手为决定时必需探究车辆动力学牵制前提,计划一个动态危险评估模子,用来一连评估碰撞与车辆安谧性的合系危险。车辆质心处的横向加快率为:


个中,vx为纵向速率,vy为横向速率,γ为车身横摆角速率,β为车身侧偏角。则车辆横向加快率为
彰着0≤U≤1,车辆横摆角速率γd与U的取值相合,为了保障车辆的横向安谧性,其横摆角速率不行太大,须要对最大的横摆角速率举办牵制。现正在就探究横摆角速率γd=f(U)的最大值题目。遵循KKT道理,最大值将显现正在极值点或者范围点。当U=0或者U=1时,车辆横摆角速率γd=0,因而,换道历程中最大的横摆角速率必定显现正在极值点。对横摆角速率γd=f(U)求导可得极值点知足方程
正在实质的车辆避障历程中,为愈加有用地评估危险,从而进一步寻觅安闲换道隔断的极限身分所正在,本文采用了伴随车辆和前车的及时隔断。假设殷切避障的极限安闲隔断知足如下合连式:
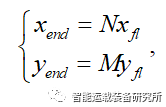
个中,M和N为比例系数。如图4所示的殷切转向避障,个中,xfl为车载传感器(雷达或摄像头)探测到隔断前车的纵向隔断,yfl是当行驶隔断为xfl时的横向位移。
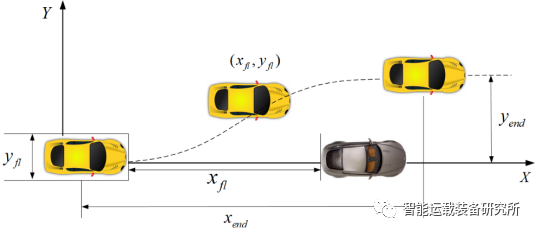
图4 殷切转向避障假设(xfl,yfl)是无碰撞换道轨迹上的一个点,遵循换道轨迹的公式可得M和N之间知足合连式
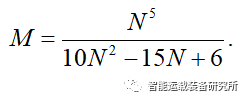
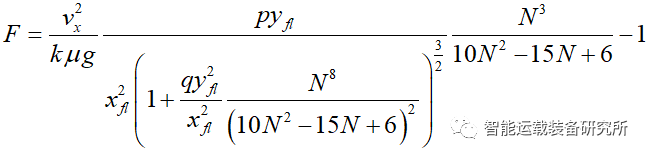
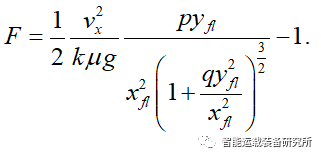
安闲换道历程的危险评估函数需知足F≤0,其对应的极限安闲身分恰恰对应F=0。此时,本车与阻碍物车辆间的纵向隔断xfl是自变量N的函数,即F=0相当于隐函数F(xfl,N)=0,换道的极限安闲身分是xfl取最小值时,该题目就形成了求解隐函数的极值点N使得纵向隔断xfl最小。通过隐函数求导可得其极值点为N=2.2,取N=2,则M=2。则简化后的危险评估函数为
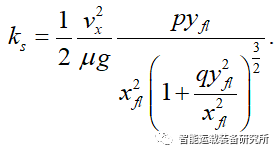
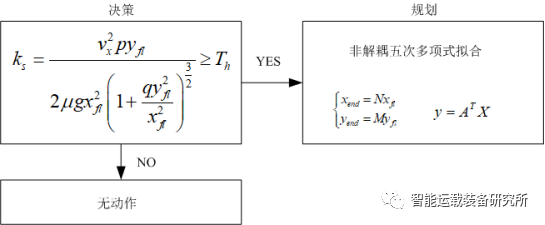
当车辆殷切换道避障时,假设车宽为1.7m,横向安闲阈值取0.5m,则yfl=2.2m。遵循实质的纵向隔断xfl和行驶速率vx及时筹划动态因子ks,当Thmin≤ks≤Thmax时即可换道避障,不然存正在碰撞或者横向失稳的危险。作为决定历程如下图所示。
汽车测试网-创建于2008年,报道汽车测试技能与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

