近年来,自愿驾驶成为汽车行业热门,不过事变频发,贸易化落地困苦阻难了自愿驾驶本领疾捷生长。著作以驾驶安定为主题,提出了新的自愿驾驶等第划分手法并对差别
近年来,自愿驾驶成为汽车行业热门,不过事变频发,贸易化落地困苦阻难了自愿驾驶本领疾捷生长。著作以驾驶安定为主题,提出了新的自愿驾驶等第划分手法并对不划一级实质举办仔细说明。基于此手法,指出此刻自愿驾驶本领生长道道缺点并计划了一种正在量产车上逐级开释自愿驾驶功效的本领道道,供行业参考。
汽车自觉明此后,经验一百众年的生长,仍然成为人们生涯中不行或缺的一局限。2017年,天下边界内出售汽车9680 万辆[1],2018 岁晚,中国汽车保有量到达 2.4 亿辆[2]。宏伟的汽车存量酿成日益急急的交通拥堵,情况污染,能源损耗等社会题目。自愿驾驶本领被以为是办理这些题目的有用手法,但近几年,自愿驾驶汽车事变频发,如:2016 年 5月 7 日,特斯拉一辆开启“自愿辅助驾驶”的轿车撞上一辆货柜车,驾驶员身亡[3];2018 年 3 月 18 日晚,美国亚利桑那州一名女子被 Uber 自愿驾驶汽车撞伤之后,不幸身亡[4]。这惹起人们对自愿驾驶安定性的忧虑,并迫使咱们从新审视和思虑自愿驾驶本领的生长。
大凡,企业正在研发自愿驾驶产物时,会依照自愿驾驶本领等第举办产物定位并订定本领道道图,以是合理的自愿驾驶等第划分可有用鼓舞家当策略订定,引颈本领生长偏向。此刻,业界普遍采用国际自愿机工程师学会(SAE)的 6 级划分手法(J3016TM)[5],该准绳凭借动态驾驶做事界说自愿驾驶级别,但贫乏了对驾驶安定的考量。本文参考 J3016TM, 依照此刻自愿驾驶本领发显现状,以驾驶安定为主题,提出一种新的自愿驾驶等第划分手法和本领生长道道自愿驾驶等第划分手法
汽车驾驶瑕瑜常繁复的经过,从自愿驾驶汽车事变统计[6]中能够理解出,自愿驾驶体例(以下简称体例)正在感知和计划方面依旧存正在缺陷。固然体例能够避免人类误操作,而且不知疲劳,不过面临危急不料状况,依旧无法精确处置。正在所有行驶域中,人类驾驶事变和自愿驾驶事变合联能够用图 1 吐露。咱们期望,纵然是第三方负担,自愿驾驶事变的边界和数目都远低于人类。只要体例成熟到肯定水平,能有用避免事变时,人类技能安定地把驾驶把握权交给体例。以是竣工自愿驾驶的首要宗旨是办理安定题目,竣工“0”事变, 次要宗旨才是庖代人。

自愿驾驶是一项众学科统一、众本领集成的新本领,体例把握器众采用人工智能本领,是自愿驾驶最主题局限。人工智能秤谌决心了体例的“智力”秤谌,目前,人工智能只到达婴儿阶段[7],它不具有依照逻辑推理负责新学问的本领。“监视研习”是迄今为止最获胜的机械研习形式[8]。关于自愿驾驶体例,人类驾驶员是最好的师长。体例必要正在人类驾驶员参加下,举办海量的研习和陶冶,技能接续完备成熟。也即是说,体例必要正在人类的监视和助助下,慢慢收受驾驶权。自愿驾驶成熟的经过也是人工智能迈向更高阶段的经过。
自愿驾驶体例分感知层,计划层,履行层,差异庖代人的眼睛,大脑,行动。实质上。关于自愿驾驶,不管感知和计划采用何种本领办法,最终展现自愿化秤谌的是履行层, 是自愿驾驶对车辆的横向和纵向把握本领。以是自愿驾驶能够根据体例对车辆加快,制动,转向的把握本领举办划分, 并配以操纵条目讲明。1.2自愿驾驶等第划分计划
基于以上规定,自愿驾驶能够分L1~L5五级,个中L1~L3为自愿驾驶体例辅助人类驾驶, 称为高级驾驶辅助体例(ADAS);L4 为人类辅助自愿驾驶体例;L5 为一律的自愿驾驶,不必要人类辅助,称为无人驾驶。自愿驾驶等第划分计划睹表 1。表 1 自愿驾驶等第划分准绳
L1 级:车辆的加快,制动,转向一律由人类操作,体例只供应警示,提示类音讯,紧要宗旨是进步驾驶安定性和安闲性,如前撞预警,车道偏离预警,盲区检测,疲顿驾驶指点等。关于自愿驾驶体例,这一级别紧要展现体例感知秤谌, 磨练感知体例的误报率,漏报率,切实度,算法逻辑合理性等。

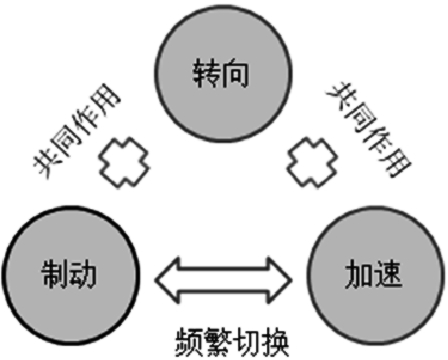
L2 级:车辆的加快,制动,转向由人类操作。当体例感知到紧急情状并占定驾驶员未接纳安定操作或者操作亏折以规避危险时,体例举办短暂的过问,直到紧急消弭后,体例退出过问。汽车行驶安定题目紧要来自碰撞(前撞,后撞, 侧撞等),人类驾驶的避撞操作除了简单的加快,转向,制动, 更众的是复合操作,如转向+加快,转向+制动,以及转向时, 加快和制动差别频率的切换,汽车驾驶避撞操作睹图 2。目前商场化使用的驾驶过问功效只涉及制动体例,如 AEB,ABS,ESC。纯真的制动过问无法一律起到避撞效率,极度正在高速行驶时,危急制动可以导致连环撞车。ECE R131[9]条件举办静态宗旨试验时,测试车辆应下降车速省略碰撞吃亏, 而非避免和前车相撞,宗旨是为了避免后车追尾。熟行驶中, 当驾驶员面临前哨危急状况时,除了制动,平常会接纳转向+制动,以避免事变。以是现阶段应大肆生长 L2 级过问驾驶本领,如自愿危急加快(AEA),自愿危急转向(AES),以及 AEB,AEA,AES 彼此之间的合营。越过 L2 级的自愿驾驶本领念要进步行车安定,需扶植较高的安定阀值,下降行驶出力,如许会酿成交通拥堵,违背了研发自愿驾驶的初志。
L3 级:车辆的加快,制动,转向中的 1 项或者 2 项由体例操作,其余驾驶举动由人类操作,也即是“人机共驾”。正如上文所说,驾驶是加快,转向,制动彼此合营的经过,“人机共驾”相当于两个司机开车,“人”和“机”驾驶本领和计划本领差别,况且人类驾驶格调也会跟着心思和时分紧急度发作变更,彼此之间很难默契配合。这会给驾驶员酿成很大心境包袱,使驾驶员发作怯怯。以是 L3 级别并未骨子进步驾驶出力,只是自愿驾驶过渡阶段。现阶段 L3 级使用紧要是单纯场景的泊车辅助,高速公道自合适巡航(ACC) 等。
L4 级:加快,制动,转向总计由体例操作,驾驶员需依照体例哀告收受车辆。车辆正在大局限时分自愿驾驶,但车上依旧必要装备驾驶员,驾驶员行动能够分开偏向盘和踏板做其它事务。当体例感知情况变更无法履行驾驶举动,或者体例展现未知差池无法连续举办自愿驾驶时,体例实时指点驾驶员正在肯定时分内(时分足够长,譬喻 10S 以上)内收受车辆,纵然驾驶员未实时收受,车辆可自行减速行驶到安定地带。必要留意的是,L4 级另外自愿驾驶体例仍然具备 L2 级应急处置本领,不应因事变危险,条件驾驶员随时当即收受车辆,那样驾驶员需永远保留留意力会合,假若分神或者睡着,就会形成事变,行驶安定无法保险。L5 级:无人驾驶阶段,从动身地到宗旨地,加快,制动, 转向总计由体例操作,车辆能够不装备驾驶员,体例感知和计划本领,冗余本领一律能够保险车辆高效、安定地来到宗旨地。人类驾驶员彻底解放。
咱们盼望全天候,全道况操纵自愿驾驶汽车,这条件体例操纵情况不低于人类驾驶,但自愿驾驶生长经过中,本领从无到有,再到成熟,是一个接续寻找与循序渐进的经过[10]。体例正在知足车规级同时,必要接续完备并伸张操纵场景和合用边界。当自愿驾驶体例合用条目低于人类驾驶时,应正在体例名称上做昭彰的象征,以指点消费者制止误用。创议正在体例名称的右上角增进“R”(R 吐露 Restrict),如 AEBR,L3R,并对限定操纵条目做仔细讲明。以家用轿车为例,自愿驾驶体例合用情况和场景如表 2 所示,不知足这些操纵条目的自愿驾驶体例应增进限定操纵讲明。

“渐进演化”道道:从 ADAS 先导使用,对自愿驾驶持严谨立场,器重参加与回报的平均,目标于研创造阶段可量产的 ADAS 产物,并慢慢研发到无人驾驶阶段。这种道道安定平静,但对自愿驾驶本领参加的亏折,会导致其正在将来产物角逐中处于劣势。大局限古代车企和零部件企业走这种相对落后|后进的道道。
“革命性”道道 级自愿驾驶汽车,谋求无人驾驶的疾捷落地,但现有本领瓶颈难以疾捷打破,纵然竣工“无人驾驶”,也急急依赖高精度舆图和循迹本领。对道道情况条件高,只可正在特定的区域和情况下操纵。平常科技公司走这种本领道道,如谷歌。近几年,越来越众的古代车企也到场到这个阵营,如福特,通用。
“特斯拉”道道:正在搭载自愿驾驶体例硬件的汽车上, 最先使用辅助自愿驾驶功效,让用户体验自愿驾驶容易的同时,助助其接续堆集测试数据,通过软件升级完备自愿驾驶体例,最终竣工无人驾驶。由于该道道 阶段,对道道危险识别和把握本领亏折,以是条件驾驶员双手不行分开偏向盘,假若驾驶员分神,容易导致安定事变。骨子上,该道道并未真正下降驾驶员劳动强度。
自愿驾驶离不开大方测试,测试平常经历软件正在环,硬件正在环,车辆正在环,封锁园地测试和公然道道测试 5 个症结。通过设定虚拟场景对体例举办仿真陶冶,可大大缩短了测试时分和本钱,但虚拟场景所能遮盖实在凿繁复的交通情况至极有限,况且仿真的恶果受限于本领职员驾驶经历和秤谌。公然道道测试是自愿驾驶最有用测试手法,依照美国兰德公司申诉[11]:正在 95%置信秤谌下,要声明自愿驾驶汽车事变去逝率低于人类(人类驾驶汽车每 1 亿英里去逝 1.09 人),必要举办 2.75 亿英里以上的安定行驶测试,采用 100 辆车构成的车队,每年 365 天,每天 24 小时不间歇地以 25 英里每小时的速率举办测试,或许必要 12.5 年。这种通过装备驾驶员的测试车辆举办大家道道测试的手法,本钱过高,况且堆集到宗旨里程数要数年。
本文推举的本领道道参考“特斯拉” 道道,欺骗装置自愿驾驶体例的量产汽车,通过商场化运营累积测试里程,差别的是,自愿驾驶功效要从 L1 到 L5 逐级开释。整体本领道道计划如下:
a) 设备自愿驾驶体例的汽车大方投放商场,最先怒放预警功效,陶冶 L1 级感知本领,识别危险本领,并向驾驶员研习避险操作。
b) L1 级成熟后,车辆开释 L2 功效。正在告急期间过问油门,制动,转向,避免碰撞,人类驾驶员能够随时中缀过问驾驶,收受车辆,直到“安定防撞体例”竣工“0”事变。正在这一经过中。体例模仿 L4 级自愿驾驶,下达指令给线控体例,不过线控体例并不履行敕令(L2 级指令除外),体例会对照下达的指令和司机操作的吻合度,并向驾驶员研习, 完备把握算法。
c) L2 级别成熟自此,自愿驾驶汽车具有行驶安定保险本领,体例开释 L4 级功效,这时仅必要驾驶员监视车辆运转,正在须要的期间收受车辆,纵然人类不收受,车辆会自行开到安定地带。a) 跟着 L4 级别本领成熟,人收受车辆的概率越来越低,直到不必要收受,竣工 L5 级无人驾驶。车上不必要驾驶员,搭客可自正在选取自愿驾驶形式,如安闲形式、出力形式、危急形式。L2 和 L4 是自愿驾驶生长的最环节阶段,也是最漫长的阶段,不过借助产物商场化大大缩短本领研发周期和本钱。假若环球每年有 1 百万台汽车装置自愿驾驶体例,每台车行驶 1 万公里,每年能够累积行驶里程 1 百亿公里。闭幕语
正在自愿驾驶辅助本领(如 V2X,电子导航舆图)助助下, 无人驾驶终将竣工,并转换咱们的生涯形式。能够仰慕的将来可以是如许的:天下上,私家车数目将省略 4/5,人们无须考驾照,也不必要进货汽车,而是向出行办事公司租赁无人驾驶汽车,由于 10 年租赁用度远低于汽车贬值,租赁汽车更划算,况且用户不必要支出加油,充电,珍爱维修等用度, 这些总计由公司担任,不过必要用户把车辆 90%的闲置时分交由公司照料,举动共享汽车接客,收益两边共享。无人驾驶汽车将转换汽车家当构造,汽车创制厂沦为代工场,出行公司每次向代工场下达 10 万台以至百万台订单。其它,充电站,加油站,洗车店,超市,总计会合正在统一区域为自愿驾驶汽车办事。这时降生一个新职业,自愿驾驶社区照料员, 担任照料相近的无人驾驶汽车。当无人驾驶汽车进站充电的同时,照料员构制职员对车辆举办洁净,检修维持,充满电后,超市职员将客户收集下单的物品放进后备箱,无人驾驶汽车载货回家。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


