ERTRAC持续每年对自动驾驶技术路线图(Automated Driving Roadmap)进行修正与更新,此次发布的草案提出了2050年愿景及基础设施、验证和AI与数据等方面所面临的挑战。提出了2030年目标应用,包括高速公路与运输走廊、限定区域、城市混合交通和乡村道路等4类关键应用场景。并对2040年的拓展应用进行了展望。最终提出了实现以上应用及愿景所需的影响因素,包括基础设施和商务模式、技术促成因素、验证、AI与数据。
本路线年目标》应被视为对CCAM伙伴关系SRIA的补充,为在此时间范围内的应用提供了一些更具体的机会。
在编制本路线图时,还考虑了其他路线图,ACEA路线图的政策和监管重点、US CAR研究和英国Zenzic路线C联盟的互联路线X路线图。此外,还考虑了Ecorys关于自动驾驶车辆的研究。2030年应用目标《2030年应用目标/Agenda 2030》是本路线图的核心,描述了CCAM产品和服务的不同领域。它们在不同的特性上有所不同,在不同的时间范围内开发,并提供各种各样的用例。这些领域总体上代表了研究、标准化、监管和投资的运营议程。
高速公路和走廊/ Highways and corridors——最有可能成为首个临时驾驶而无需人为驾驶责任的的工业化解决方案。
nfined areas–各种使用案例,在这些案例中,更简单的交通环境促进了早期演示和有限的工业化。
各领域相关内容包括该领域的具体特征、发展该领域的重要性、社会期望目标、典型预期用例、基础设施、车辆技术和验证赋能因素的哪些方面在该领域特别重要、加速工业化的关键标准化领域、监管缺失等。
高速公路和走廊/ Highways and corridors描述公路自动驾驶和辅助走廊领域将实现高速公路自动驾驶、枢纽间卡车运营和基础设施支持合作援助的典型应用。在该领域,具有CCAM功能的车辆将与基础设施支持一起部署。
在高速公路上,配备不同级别ADAS高级驾驶员辅助系统的车辆将占大多数。使用V2X技术以及能够实现较低级别自动驾驶(L0-L2)的车辆,合作驾驶员辅助系统(cooperative driver assistance systems)的份额将增加。随着技术成熟度的提高,更高水平的自动驾驶(L3-L4)将可能取决于监管。
2019年和2020年,L3欧洲试点项目在不同的欧洲国家的高速公路上试行了SAE L3高速公路司机和堵车司机功能。该试点活动的数据分析结果将加速在高速公路场景中部署AV功能。
将选择几个辅助走廊,其中道路基础设施和通信系统能力将满足在基础设施支持下部署CCAM车辆的要求。候选走廊是那些具有混合通信能力的走廊,由短距离和长距离通信技术的智能组合组成,这得益于欧洲5G走廊项目和C-ROADS平台。辅助走廊将满足特定交通需求,以提高安全性和效率,提高网络利用率。
意义:高速公路和辅助走廊上 CCAM 的主要动机。 通过自动距离、机动和车速管理增强道路安全。 改善高速公路和选定辅助走廊的交通流量。 减少驾驶员工作量,增加了便利性。 在可行的情况下,尽早引入更高的自动驾驶(L3-L4),以进一步提高安全性、交通流量和便利性。社会效益和示范:考虑到高速公路网络的预期未来交通量增长,将CCAM用作解决方案非常重要。证明CCAM解决方案将满足用户和社会需求,并超越预期,以实现用户采用CCAM的目标,这一点至关重要。在日益复杂的交通情况下,在不同地区、领域和环境中演示公路自动驾驶,以证明 CCAM 的系统安全性、稳健性和互操作性是改善欧洲道路交通的有效手段。 在选定的辅助走廊进行演示,以证明具有基础设施支持的高度自动驾驶解决方案的社会效益和用户效益。公路自动驾驶和辅助走廊的典型高级用例:堵车司机/Traffic Jam Chauffeur:在塞车速度高达60公里/小时的情况下,L3,跟在前面的车辆后面,可选择换车道。该系统可使车辆安全停车。高速司机/Highway Chauffeur:130 公里/小时以内的公路上的 L3,包括换道。该系统可使车辆在紧急车道上安全停车。 安全自动跟车/ Safe Auto-follow:高速公路上的 L4,速度可达 130km/h。无需驾驶员干预。 枢纽到枢纽运输/ Hub-to-hub transport:所选监管走廊内场站/枢纽之间的 L4 运输。所需的车辆:具有 L2-L4 启用功能的经济型车辆。 CCAM 安全功能实时反应基线的定义参数。基础设施促成因素:实时交通控制。 精确定位。 C-ITS 支持充分的连接覆盖率、服务质量和数据可靠性。 可用的基础设施安全区(如硬路肩)。验证:实时交通控制。 精确定位。 C-ITS 支持充分的连接覆盖率、服务质量和数据可靠性。 可用的基础设施安全区(如硬路肩)。标准化V2X 的连接接口,例如 ITS-G5、LTE 和 5G 技术。 基础设施的功能安全。 车辆和基础设施感知性能的通用评估。 关于“安全停车区域”的规则和原则(例如,使用硬路肩和紧急车道的道德尺寸-如果发生事故且安全停车的车辆占用车道怎么办?)法规:辅助走廊中更高级别自动驾驶(L3-L4)的安全运行。 不同欧洲成员国连接车辆自动驾驶测试的统一法规。限定区域/Confined areas用例受限区域操作的典型高级用例。L4 代客泊车/ Car valet parking,提高便利性和停车设施效率 L4 摆渡车/shuttles 在限制区域以较慢的速度飞行,没有安全驾驶员(远程监控)运输人员和货物。 L4 客车在场站(depot)运行中自动操纵,以提高安全性和生产率 L4 无人驾驶卡车/挂车在场站/枢纽内运行,以提高生产率和安全性城市混合交通/ Urban mixed traffic一个关键问题是如何将自动驾驶集成到一个多式联运系统中,该系统包括具有不同技术解决方案的各种车辆、交付服务和货物运输、公共和私人交通、汽车共享和车队运营以及行人、自行车手和电动两轮车。因此,考虑到各种各样的用例和关联概率的增量方法似乎是在城市应用中部署道路自动驾驶的最有希望的方法。在这十年内,在城市中引入自动驾驶将是可行的,至少在有限的应用中是可行的,例如在其他交通量有限的专用路线上。但这些系统要完全独立处理所有复杂的城市交通状况还需要更长的时间。用例(示例)自动驾驶车辆在城市地区最有益的应用要求能够在没有驾驶员的情况下自动驾驶,如果系统无法执行任务,驾驶员必须保持警惕并随时准备控制。一个例子是自动代客泊车(Automated Valet Parking),其中真正的附加值来自驾驶员在停车前可以离开车辆。因此,相关的城市用例是L4级应用。部署将逐步进行,并根据特定的ODDs(通常为低速)和特定功能所需的基础设施进行。
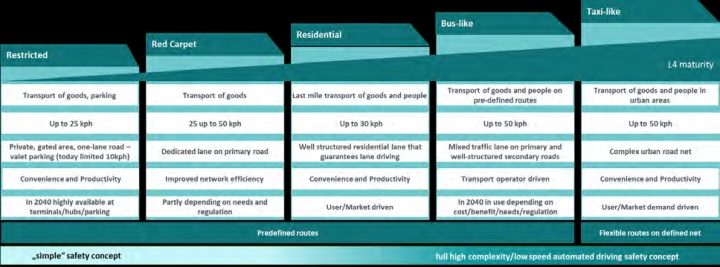
限制性应用,如自动停车、低速工作的封闭区域, 专用车道上的红地毯(Red carpet)使用案例, 人员和货物的住宅最后一英里运输, 混合交通中预定义路线上的公共汽车等应用。 在定义的道路网络中,类似出租车进行柔性路线操作。所有人的流动性包括在农村地区生活和工作的人,占欧盟人口的近30%。在许多欧盟成员国,农村人口对汽车的依赖程度很高,使用公共交通的选择可能很少,商业案例也很有挑战性。超过50%的欧盟道路死亡事故是由农村道路上的车祸造成的。因此,正是在这些道路上,道路安全自动驾驶的潜在杠杆效应最高。因此,无人驾驶车辆被视为改善农村人口和货物流动性的绝佳机会。与此同时,农村公路对更高水平的自动驾驶提出了特殊挑战。它们有混合交通(包括野生动物、农业机械等),在一些成员国中,速度相对较高,高达110 km/h,通常是迎面而来的交通,因此相对车辆速度极高,道路基础设施类型和条件差异较大。后者甚至每天都在变化。此外,农村地区的数字地图数据质量和互联性往往很差。自动紧急制动、车道偏离警告、自适应巡航控制以及转向和车道控制辅助系统的应用构成了农村道路较低自动驾驶水平的典型应用案例。在预定义路线上运行的无人驾驶共享和/或公共穿梭服务以及自动驾驶市政服务(如垃圾收集)与农村地区高度自动驾驶驾驶的早期使用案例一样,具有很大的潜力。由于节省了劳动力成本,尽管所需技术成本很高,即使最初在精确定义的路线上以非常有限的ODDs运营,但从经济角度来看,此类服务可能具有吸引力。此外,共享和/或公共交通服务的更高质量和可用性已经意味着在针对无法驾驶的人包容性方面取得了重要进展。此外,第一英里/最后一英里配送服务(配备非常紧凑的低速自动车辆)可能是农村地区具有早期技术可行性和经济可行性的使用案例。这些广泛的用例推向高市场占有率也将面临挑战。公共采购需要在所有用例中达到欧洲的共同要求。公共采购的原则应在世界范围内保持一致,以确保达到世界范围内通用的鲁棒性和安全性水平。此外,还需要为驾驶策略(即决策)建立基于巨大数据湖的人工智能概念,这些概念将在感知中广泛实施。纵观2030年目标的各个领域,走廊将进一步使公路上的用例能够应对速度挑战。启用走廊后,需要为公路ISAD(Infrastructure Support levels for Automated Driving,自动驾驶基础设施支持级别)应用制定标准,包括在天气条件或路面质量方面进一步增加ODD,以及在交通互动中基于AI的决策。以下图表代表了用例的逻辑顺序,它们将在2030年全面工业化推出,以获得高市场占有率,重点是交通复杂性有限的高速道路和涵盖了全部交通复杂性的低速自动驾驶。

除了上述方案中的用例之外,还会出现其他用例。农村自动驾驶将在特定路线上扩大,延伸到更偏远的定居点。这些是最复杂的场景,包括迎面而来的交通在内的农村公路上的高速将只能得到有限的基础设施支持。预计只有在采取具体措施限制复杂性的情况下,才能实现无人驾驶。其他特殊用例将是开拓者,例如路肩上的机器人割草机、冬季服务、道路维护和施工车辆以及公路安全挂车。根据运营的具体情况,当成熟的基础技术得到验证且价格合理时,将实现快速取胜,尤其是在公路安全方面。在互联和自动驾驶的车辆中,驾驶任务从人到机器的临时甚至完全移交需要环境感知、决策和控制系统,以满足目前仍然无法达到的最高安全和性能标准。因此,赋能技术的进一步进步对于使CCAM为更广泛的市场部署做好准备至关重要,如传感器组件和网络、具有高可靠性、故障操作能力和效率的计算系统和控制体系结构,边缘嵌入式软件和人工智能提供了灵活的可升级性和自学习能力,以及通信基础设施和基于云的服务,用于以高带宽、低延迟和最高级别的数据安全性收集、交换和分析关键数据。
特别是对于自动驾驶车辆,可以预见从基于单个车辆控制的自下而上的安全逻辑向自上而下的系统安全模式的转变,需要在车辆、基础设施和云级别灵活调整数据流、软件更新和硬件分配。这将意味着赋能技术具有广泛的通用性,并集成到一个全面的、共同设计的中央架构中,同时为车辆功能的测试、验证和监控提供新的机会。从这个意义上讲,CCAM的进一步进展将基于研究和创新生态系统参与者共同探索的新的赋能技术路径。
为了以结构化的方式描述所有这些赋能因素——即使它们之间存在着紧密的联系——进行了区分以便阅读:
基础设施,包括商业模式,最终将为道路运输的所有利益相关者带来新的挑战和机遇。 侧重于车辆及其开发生态系统的技术赋能技术,与 验证,远远超过当今的车辆验证方案和 AI 和数据生态系统
汽车测试网-创办于2008年,报道汽车测试技术与产品、趋势、动态等 联系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


