摘 要:开采了一种汽车主动安适技巧的汽车主动急迫制动(AEB)行人检测体系。该体系包括软体假人标的、假人驱动装配及其节制体系,可根据2018版中国新车评议规程(C
开采了一种汽车主动安适技巧的汽车主动急迫制动(AEB)行人检测体系。该体系包括软体假人标的、假人驱动装配及其节制体系,可根据2018版中国新车评议规程(C-NCAP)的AEB行人体系测试场景的哀求,驱动假人标的行走,并可与操控测试车辆的驾驶呆板人及时通信。展开了对假人标的行走隔绝、假人标的行走速率和与驾驶呆板人的联动实行。结果评释:该体系实行一次得胜率到达90%以上,对假人速率节制的无误度96%,对假人与车辆碰撞职位的无误度达96%;该体系可无误复现行人垂危工况。于是,该AEB行人检测体系可用于展开C-NCAP(2018)行人测试实行,举动车辆AEB体系效力评测及相干产物开采用具。
合头词:汽车主动安适;行人测试;主动急迫制动(AEB);测试场景;假人标的;驱动体系;中国新车评议规程(C-NCAP)
2016年,中国大陆每年重特大事情中交通运输事情起数、因为交通运输事情变成丧生的人数永别占到70%和80%[1]。正在联络国全国卫生构制预测的10大丧生原由中,环球因道途交通凌辱变成的职员受伤或丧生的排名仍将无间上升[2]。跟着实际需求带来的汽车安适技巧的发达,汽车主动急迫制动体系(autonomous emergency brake,AEB)[3]也越来越众的操纵到车辆上。
据美国公途安适保障协会,AEB可能节减27%的交通事情[4]。AEB行人体系厉重用于扞卫行人等易受凌辱的道途操纵者,该体系通过车辆上集成的传感器识别并跟踪交通处境中的行人,并计较其相对车辆的运动轨迹,以此占定是否有碰撞的垂危,若有垂危则体系会主动选用制动使车辆勾留,同时向驾驶员发出警戒。
为了对AEB体系的本能举办体系的测试及评议,欧美等国家和区域接踵宣告了针对AEB体系的测试章程或模范,我国于2018年7月1日推行的《中国新车评议规程(China New Car Assessment Program, C-NCAP)管制规矩(2018年版)》也体系的提出了对AEB行人体系的测试计划与评议模范[6]。这些测试规程、模范的出台,对付样板AEB行人体系的安排,抬高行车安适性具有要紧的饱动效率。
AEB的场合测试能复现真正道途中的榜样垂危场景,是验证和评议AEB体系的有用要领。为了知足AEB行人体系的测试哀求,极少机构已开采了众款AEB行人检测装配。如英国的ABD(Anthony Best Dynamics)公司和奥地利的4active System公司等接踵推出了AEB行人检测体系,并已正在诸众汽车创制商及汽车检测机构等得以操纵。
ABD公司开采的AEB行人检测装配采用了盘式电机驱动,该电机亦可举动转向呆板人的驱动电机;然而,其软体假人标的仍是由4active System公司供给[9]。
4active System公司的AEB行人检测装配采用伺服电机驱动,驱动端集成了电机及电源等,组织紧凑但相对照较艰巨,未便于实行的计算。这两个公司开采的AEB行人检测装配均是针对欧美等行人测试场景开采,如仅知足“新车评议规程(New Car Assessment Program, NCAP)”的测试哀求,不行知足中国道途垂危场景行人测试的哀求,而且开发采购和维持本钱高,晦气于中国车辆AEB行人体系的开采和验证。
于是,本文开采了一套AEB行人检测体系,包括软体假人标的、假人驱动装配及其节制体系,装配可知足C-NCAP的测试需求,同时体系测试条款可调,以知足我国垂危场景的测试哀求,末了采用实行验证测试体系的有用性。
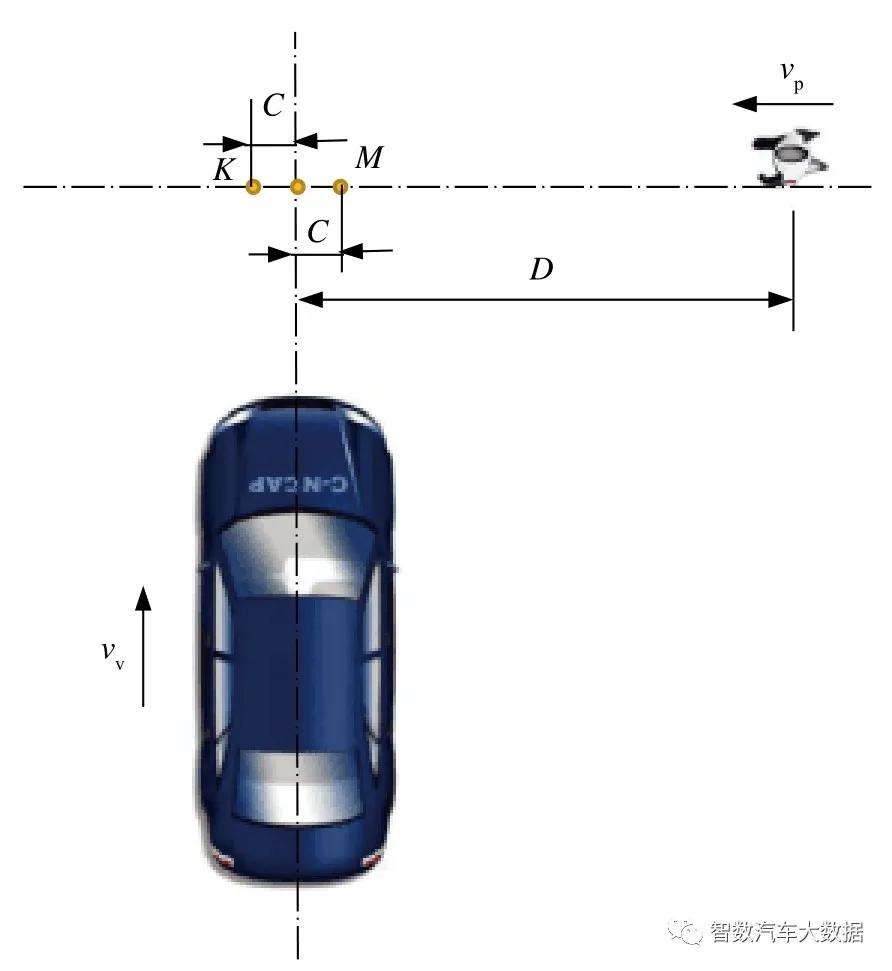
图1 测试场景示妄图如图1所示,假人标的隔绝测试车辆核心线 m (近端)。测试车辆行驶速率vv为20、30、40、50、60 km/h;假人标的行走速率vp为5 km/h和6.5 km/h两种,两者运动目标互相笔直;碰撞职位正在车辆宽度的25%处 (M点)、50%(L点)和75% (K点)处;参考点为假人标的的开始职位。测试车辆和假人标的的速率精度永别为+0.5 km/h和±0.2 km/h。测试对象为成人和儿童。
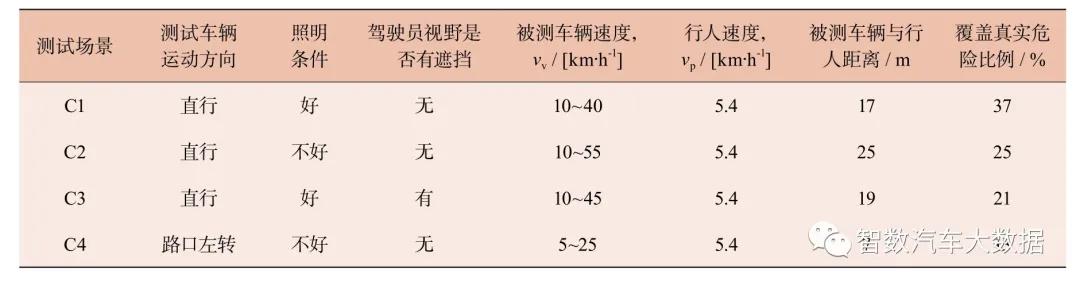
因为C-NCAP测试规程厉重是参照欧盟的E-NCAP (European New Car Assessment Program,)[10]树立,其AEB行人测试场景是基于欧美国家交通事情统计数据得回[2],并不行全部合用于中国。为此,刘颖等[11]正在中国大陆搜聚了52例车与行人冲突的工况样本,使用统计学领悟办法归结了4种行人测试场景,如表1所示。因为文献[11]等未给定车辆左转的旅途哀求及照明条款,而且行人测试中测试车辆是由驾驶呆板人操控故不切磋驾驶员视野是否有遮挡,于是可能为测试场景C1、C2和C3较亲密。为使AEB行人体系实行具有较高的反复性和可操作性,本商量设定了2种适合中国的测试场景:
2) 远 距 测 试 场 景 (car-to-pedestrian farside,CPF):测试车辆速率10 ~60 km/h,以10 km/h为间隔,行人与车辆的隔绝为20 m(该隔绝是C1、C2和C3测试场景按其遮盖垂危比例的加权均匀值)。测试车辆直线 km/h,碰撞职位为车辆的50%处,假人标的与测试车辆的水准隔绝通过行人行走速率、车辆行驶速率以及测试车辆与行人的隔绝计较获得。
凭据C-NCAP和中国行人测试场景的哀求,行人检测体系要知足以下效力:可代替行人的标的假人,可鼓动假人按肯定速率直线行走的驱动体系,可节制车辆根据设定轨迹、速率行驶的驾驶呆板人,而且要告终假人标的和车辆之间的通信,以知足两者正在指定职位爆发碰撞的哀求。
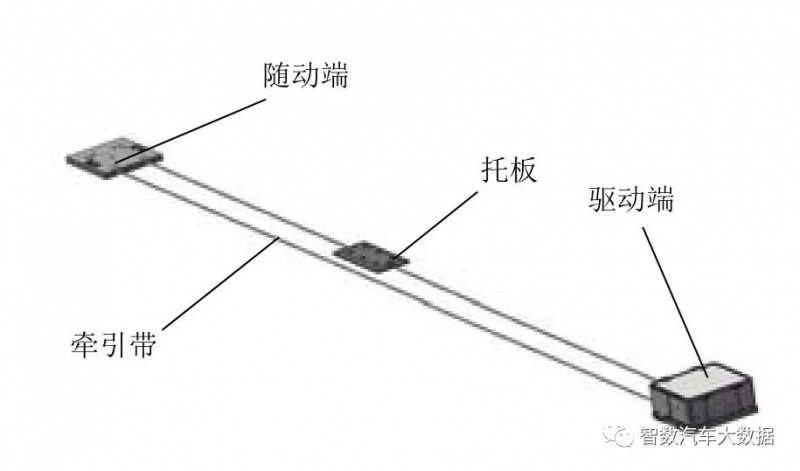
为知足以上测试哀求,体系道理计划安排如图2所示。假人标的固定正在托板上,托板两头邻接牵引带,牵引带正在驱动端和随动端之间酿成回途,并正在驱动端的驱动下鼓动托板及其上的假人直线行走,驱动端和测试车辆上装有通信开发,通过及时动态(real-time kinematic, RTK)基准站告终两者职位、速率讯息的交互,知足测试场景中对两者相对运动的哀求。
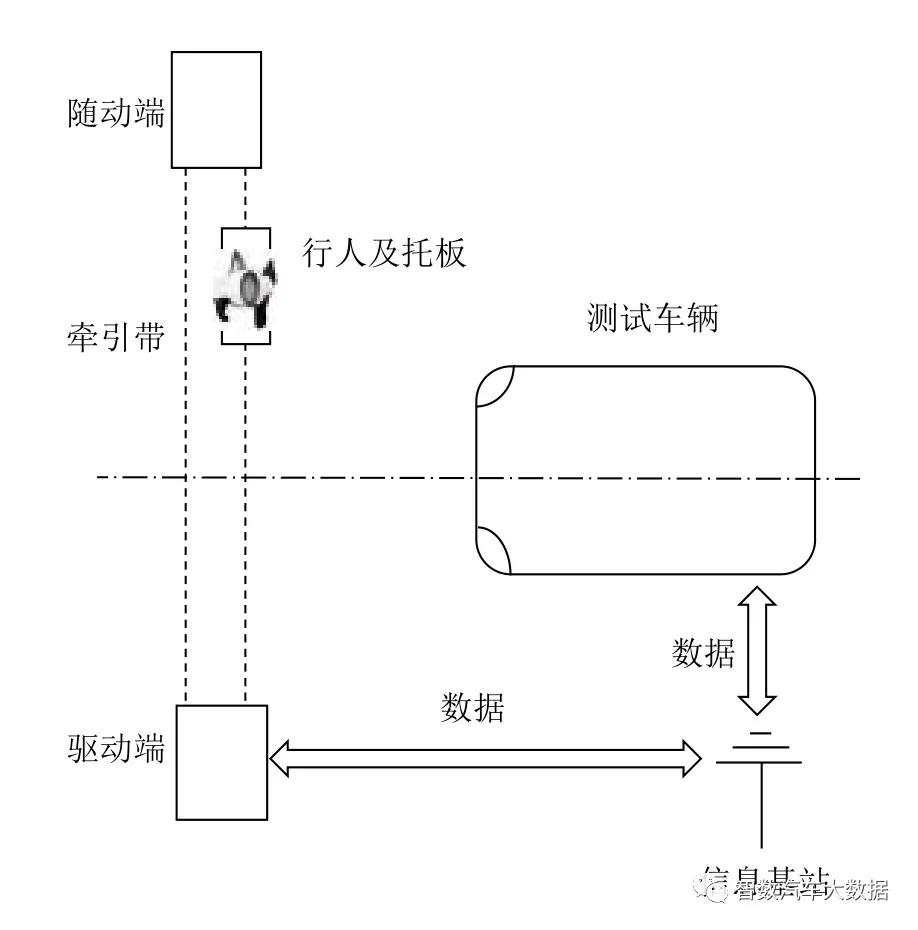
图2 体系道理计划归纳C-NCAP和中国行人测试场景可知,假人标的运动速率永别为5、5.4、6.5 km/h,测试车辆行驶速率边界5~60 km/h,测试车辆笔直于假人标的的行走轨迹行驶。因为测试车辆的运动速率和运动轨迹是由驾驶呆板人节制,于是不正在本商量的商榷边界之内。本商量重心切磋的是假人标的、假人标的的运动速率和职位节制及假人标的与测试车辆的通信。
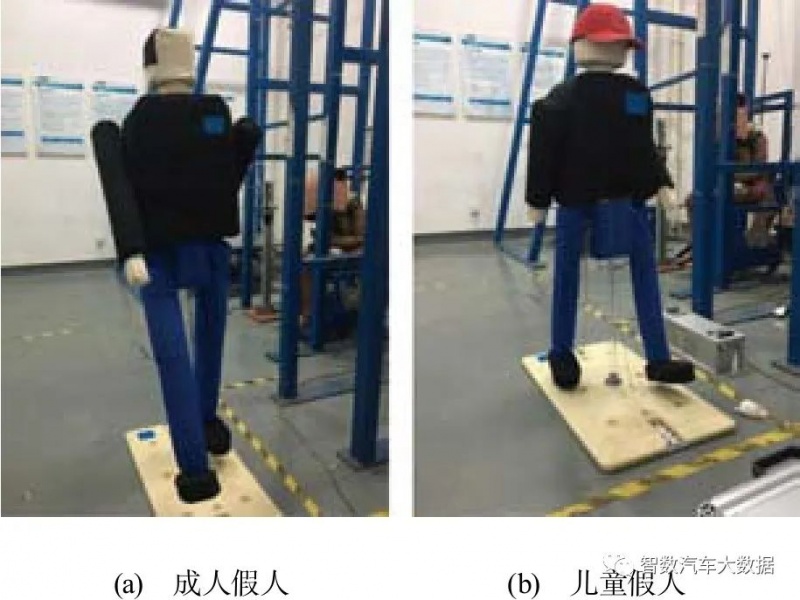
本商量根据C-NCAP中规矩的成人和儿童尺寸开采了两种肉体的假人标的,并重心切磋了假人标的的视觉和红外性情。通过正在假人面料上涂抹近红外反射二氧化钛IR-1000,抬高布料的红外反射率,使假人衣服和皮肤资料知足正在850~910 nm之间其红外反射率正在40%~60%之间的哀求[9]。假人的胯部筑设撑持杆,以撑持假人直立行走。开采的成人和儿童假人标的如图3所示。
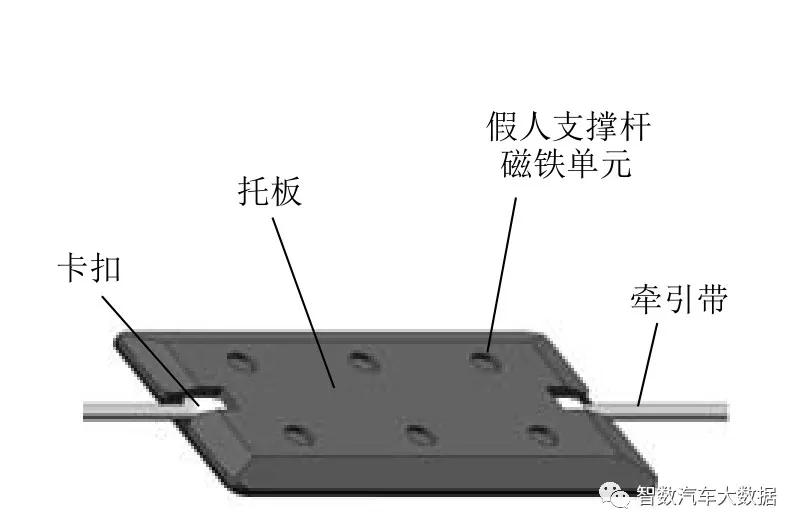
假人标的驱动体系蕴涵托板、牵引带、牵引带驱动端和随动端。托板上筑设磁铁单位,假人撑持杆可通过磁性邻接正在托板上,告终托板对假人的撑持,而当测试碰车辆撞到假人标的时,磁性邻接失效,假人从托板上脱节,避免碰撞导致统统体系的损坏。其余,托板两头筑设卡扣,告终牵引带与托板的邻接。托板示妄图如图4所示。
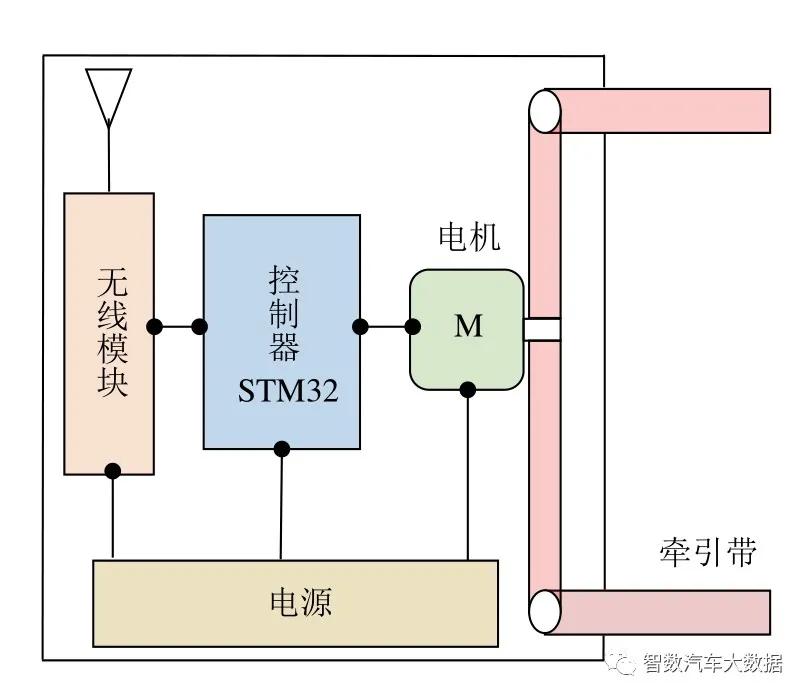
无线通信模块回收测试车辆行驶(速率和职位)讯息,并传达至节制器,节制器节制电机,告终对牵引带的驱动,进而鼓动假人标的行走。牵引带随动端完工牵引带运动的转向,酿成完好回途。假人标的驱动体系如图6所示。
正在展开AEB行人体系测试时,驾驶呆板人体系与AEB行人检测体系协同使命。凭据眼前测试场景,主动驾驶呆板人节制测试车辆根据设定轨迹行驶,主动驾驶呆板人装备了惯性导航仪和差分正确定位模块,惯性导航仪及时搜聚测试车辆的速率、加快率以及偏航角,差分正确定位模块可能及时确定测试车辆的详细职位,惯性导航仪和差分正确定位模块将及时测得的讯息通过无线的形式发送给AEB行人检测体系的节制体系。
AEB行人检测节制体系凭据测试场景对测试车辆行走速率、假人行走速率和碰撞职位的哀求,断定假人的启动工夫,即测试车辆相对行人检测装配行驶至预订职位的工夫。
当体系侦测到测试车辆职位讯息知足假人的启动条款后,体系驱动假人行走。驱动体系根据测试场景对假人行走速率和碰撞职位的哀求,节制电动机启动、加快、减速、制动,最终告终测试车辆与假人标的相对运动的哀求。
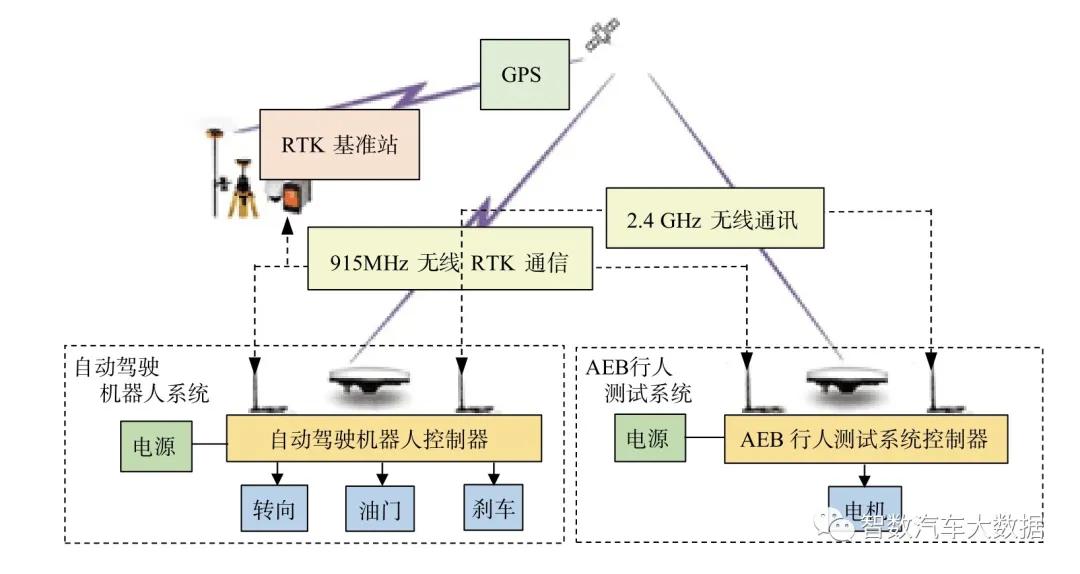
及时动态(RTK)基准站将回收到的环球定位体系(global positioning system,GPS) 定位讯息以915 MHz无线通讯信道发送给AEB行人检测体系和主动驾驶呆板人体系,而主动驾驶呆板人体系将测试车辆的职位、速率讯息通过2.4 GHz通讯信道发送给AEB行人检测体系。无线通信模块为Nordic公司研制的NRF24L01芯片。
因为平常GPS定位差错抢先3 m [12],达不到实行测试的哀求,于是本商量通过差分定位来告终体系的无误定位。差分定位模块由RTK基准站和搬动站两个别构成,此中RTK基准站固定正在壮阔无遮挡职位,搬动站固定正在测试车辆和行人测试装配上。通过RTK基准站搜聚平稳的GPS定位讯息,并将讯息发送给搬动站,搬动站连接基准站的定位讯息和自己搜聚的GPS信号,举办载波相位差了解算,从而使搬动站得回cm级相对定位讯息。通过差分定位模块,即可告终对测试车辆和假人标的运动的精准定位,进而节制行人驱动体系及测试车辆的驾驶呆板人,告终两者无误的相对运动哀求。
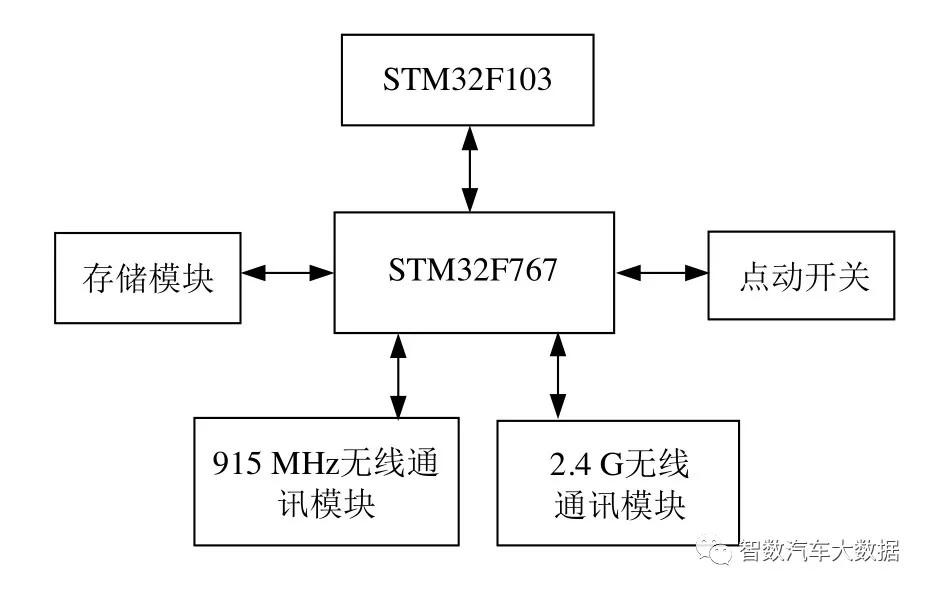
AEB行人检测体系节制器及时回收主动驾驶呆板人体系发送的测试车辆的速率、职位讯息,通过对照测试车辆的及时职位是否与AEB行人检测体系节制器计较出的体系测试触发点职位相同,确定是否触发假人运动。假人运动触发后,AEB行人节制器挪用对应测试场景的电机节制算法以节制电机的转速,从而节制假人的搬动。节制器芯片分主控芯片(STM32F767)和被控芯片(STM32F103),主控芯片担任回收各模块传达的讯息并举办讯息的领悟、治理,被控芯片担任对驱动电机加减速的正确节制。节制器的组织如图8所示。
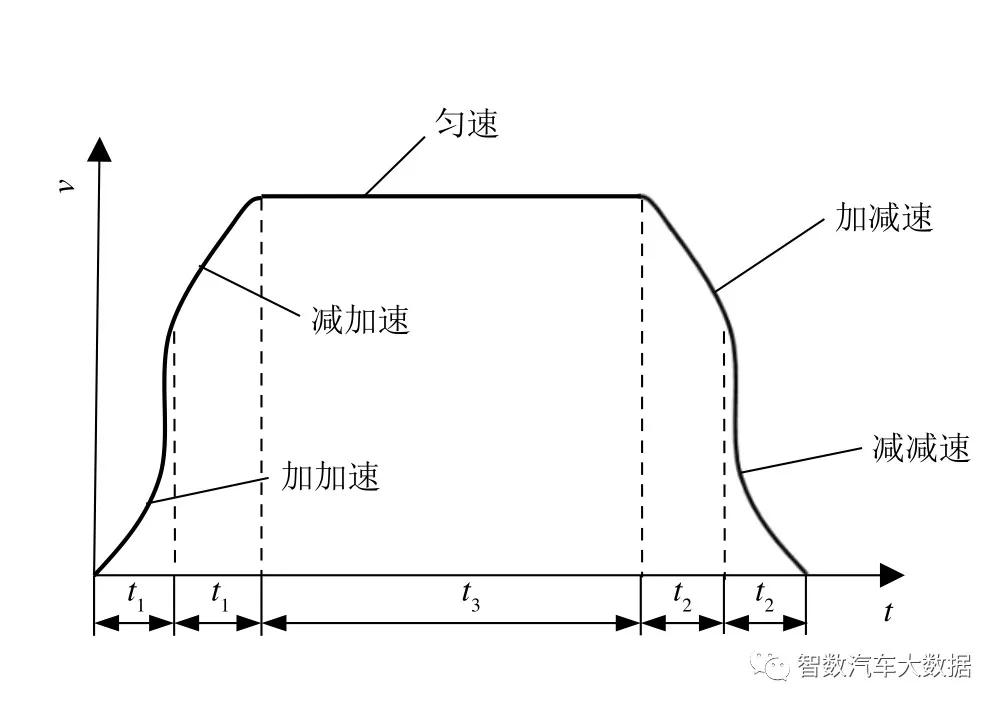
正在测试流程中,假人需通过加快、匀速和减速流程,假人驱动体系正在节制假人运动速率的同时,需精准节制假人的运动职位,以告终测试流程中通过托板将假人运载至指定的职位。本商量安排了S型弧线加减速节制办法,将加减速划分为:加加快、减加快、匀速、加减速以及减减速等5个阶段,如图所示。正在加加快、减加快、加减速、减减速这4个流程中,加快率变革率J的绝对值恒定,加减速形式正在大肆职位的加快率都接续变革,速率弧线腻滑,可避免柔性冲锋。
图9中t1到t3为各个阶段的运转年光。因为J为恒定值,正在加快阶段和减速阶段之间,速率应仍旧稳定,则加加快、减加快、加减速与减减速通过的年光巨细一样,即t1 = t2。
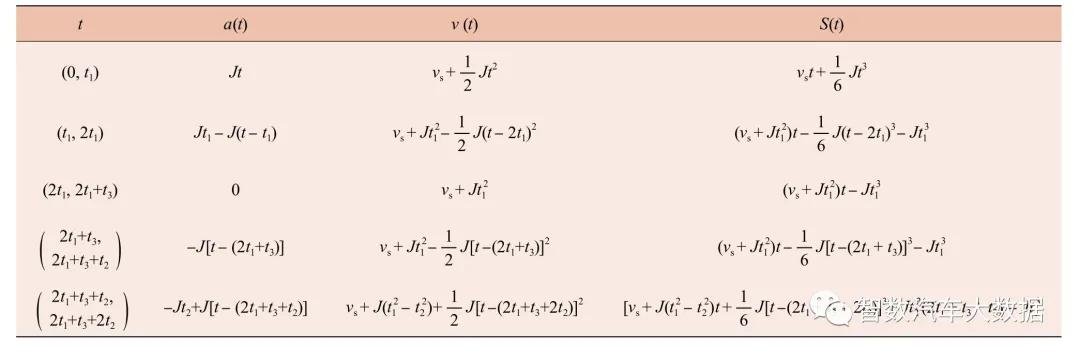
设vs为初速率,ve为末速率,由运动学合联计较,可得假人的运动加快率a、速率v、位移S的计较公式如表2所示。
3.5 体系联动节制1) 计较体系触发点。启动AEB行人检测体系的差分正确定位体系,使用行人检测体系搬动站测得P0(假人标的初始职位)、P1(碰撞点职位)坐标(x1,y1)和(x2,y2)。其余,使用测试车辆搬动站得回测试车辆车头中点处坐标V1(x3,y3)及车辆航向角R。由车速v及行人行走至碰撞点所需年光T(D1 / Vp),换算获得体系触发点M的坐标(x4,y4)。

的夹角δ。驾驶呆板人及时占定D2和δ的数值变革,通过正向或反向转动目标盘,及时更新测试车辆航向角与职位,使得车辆的纵向核心线与测试途径重合,完工测试车辆职位、形状安排。

3) 体系联动测试。驾驶呆板人体系及时更新车辆车头核心点V1(x3,y3)的坐标值,并通过无线模块发送给AEB行人检测体系,AEB行人检测体系及时将V1点与M点坐标值举办比对,当x3= x4且y3 = y4时,AEB行人检测体系触发假人标的搬动,行人驱动节制器节制假人标的按该测试场景调剂电机转速,最终告终测试车辆行驶到P1点时,假人行走到P1点。体系联动节制逻辑如图10所示。
为了验证AEB行人检测体系的效力,本商量根据C-NCAP(2018版)规矩的行人测试场景和我国行人测试场景共6种测试场景,展开了行人垂危工况复实际验,厉重用于检测AEB行人检测体系对假人标的速率、职位的节制技能,以及AEB行人检测体系与测试车辆的无线通信本能。
开始展开的是匮乏测试,即没有与驾驶呆板人举办联络节制,只运转AEB行人测试装配,测试正在差别测试场景下电机加减速节制算法对假人标的的运动隔绝和均匀速率的节制技能,如图11所示。每种测试场景各展开3次实行,而因为国里手人测试场景差别速率下假人标的与测试车辆的水准隔绝均纷歧样,于是共展开了(4+11)×3 = 45次实行,试验结果如表3所示,此中不对适测试哀求的试验结果正在表内加粗显示。由试验结果计较可得AEB行人检测体系对假人行走隔绝和速率节制的无误度为96%(无误度=合适哀求的试验次数/总试验测试)。由此可知,AEB行人检测体系可根据试验哀求无误的节制假人标的的运动。
注:隔绝有用边界为假人标的与测试车辆的水准隔绝与车辆横向偏移量精度±50 mm之和。速率有用边界为假人标的行走速率与其速率精度±0.2 km/h之和。
完工体系匮乏测试后,展开AEB行人检测体系与驾驶呆板人的联动实行,磨练AEB行人检测体系与测试车辆的无线通信效力。测试车辆选用长城vv7s,将其AEB效力封闭,以检测差别的测试场景下,假人对车辆的碰撞点是否知足差别测试场景的哀求。实行现场如图12所示。

根据CNCAP(2018版)和国内AEB行人测试场景展开实行,此中凭据CNCAP(2018版)测试哀求共展开20次实行(测试车辆速率为20 ~60 km/h,以10 km/h为间隔,每种测试场景对应5次实行),根据国内测试场景展开11次实行,共31次实行,实行结果如表4所示,表内数据显示第几次实行时该测试场景实行得胜,即与驾驶呆板人联动时碰撞职位、速率、隔绝都到达实行哀求。
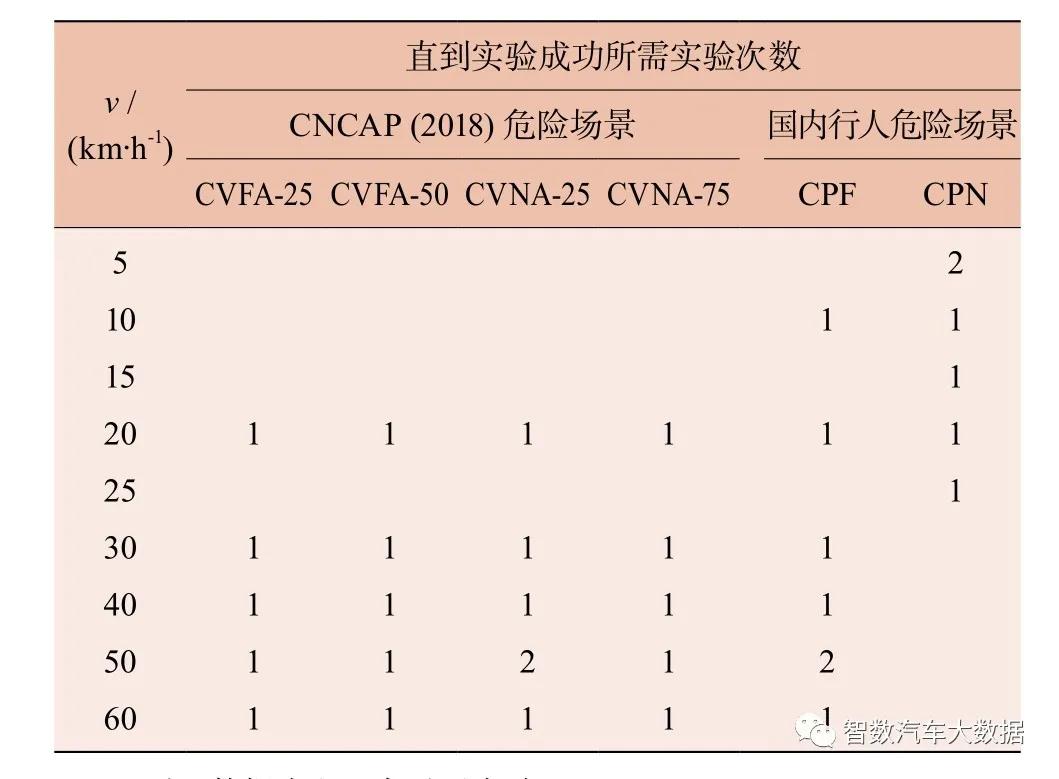
正在测试假人标的的运动隔绝和行走速率的实行中,AEB行人测试体系对假人速率节制的无误度,假人与车辆碰撞职位的无误度到达96%,2次展示(45次实行)差错抢先精度有用边界的环境(近距测试场景车速为25 km/h,远距测试场景车速为50 km/h),差错厉重是因为地面摩擦力不均及牵引带的弹性变成。然而,切磋就职错较小,可能以为电机加减速节制算法的节制本能优秀,也许知足试验哀求。其余,正在AEB行人检测体系和驾驶呆板人的联动实行中,小概率(3/31)展示测试车辆达到预订职位而假人标的未行走的环境,这厉重是由于两者通信展示很是。因为本体系与驾驶呆板人的无线 GHz通讯信道,个别无线局域网、蓝牙也采用了这一信道,能够对开发通信发作搅扰。于是,展开AEB行人测试实行哀求实行场合壮阔无搅扰。通过对实行场合无线通信开发的节制,体系可较好的完工与驾驶呆板人开发的联动实行。
通过以上领悟可知:本商量开采的AEB行人检测体系可较好的复现CNCAP和中国行人测试场景。相较于外洋开采的AEB行人检测体系,本商量开采的测试体系具有以下3个甜头:
3) 体系本钱消浸,使其可被更众的AEB行人体系研发单元操纵,有助于饱动AEB行人体系的检测及其本能的晋升。
然而,本商量也存正在着不够。比如,本商量开采的假人标的仅切磋了假人的红外反射性情而未切磋其雷达反射性情;其余,本商量未切磋体系对欧洲新车评估规程(Euro-New Car Assessment Program, ENCAP)。等其它测试规程的合用性。因为ENCAP(2018版)中对道途骑行人的扞卫提出了哀求,进而对AEB行人检测体系的驱动本能提出了更高的哀求。此后将重心商量软体标的假人衣服的雷达反射性情并进一步商量外洋AEB行人测试哀求和办法,抬高体系的合用边界及牢靠性。
05结 论本商量开采了一种AEB行人检测体系,该体系可根据中国新车评议规程(C-NCAP)和中国汽车主动急迫制动(AEB)行人测试的哀求,精准的驱动假人标的行走,并可与操控测试车辆的驾驶呆板人及时通信。
实行结果评释:该实行体系对假人行走隔绝和速率节制的无误度为96%,与驾驶呆板人联动实行的一次得胜率到达90%,而且开采的假人标的具有榜样的人体特质及红外反射性情。该AEB行人检测体系可较好地复现众种行人垂危工况,具有较高的测试精度。该体系可用于展开C-NCAP(2018版)行人测试实行,是车辆AEB体系效力评测及相干产物开采的有用用具。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏