根据sheep汽车研究院智能驾驶配置数据库数据,截至2023年第三季度,NOA功能渗透率接近3%,较去年同期提升近一倍,总体呈现持续上升的态势。

NOA正在驱动智驾行业进入了新一轮的竞争,并带动了大算力芯片、激光雷达、云服务等上游产业链需求的爆发,禾赛、速腾聚创、地平线、英伟达等各自赛道的优势企业,借着这股春风,在今年均取得了不错的业绩表现。
更为重要的是,NOA正快速从高速向城市发展。伴随着各大车企激进的开城计划,2023年已被普遍认为是“城市NOA元年”。
2019年,特斯拉率先在国内推出NOA功能后,各大车企纷纷开始布局,蔚来、小鹏、理想、长城、华为等厂商陆续发力。
随着高速NOA功能逐渐进入规模量产的阶段,城区NOA开始成为车企争先发力的重点,意图抢占先机。尽管各家的方案命名有所不同,NGP、NOH、NCA等不一而足,但本质都是NOA领航辅助驾驶。
去年9月,小鹏开始向少量车主推送了城市NGP功能,,开启了城市NOA的内测。毫末智行和小鹏汽车争抢城区NOA首发落地,在2022毫末AI DAY上,毫末智行发布支持城市NOH功能的HPilot3.0系统,首发搭载于长城魏牌车型上。随后,长城魏牌方面也宣布,在2022年底之前,城市NOH功能就将覆盖10座城市,2023年将计划覆盖超100座城市。
今年,各大车企更是不停高调的宣发开城规划,上半年还在北京、上海、广州、深圳等城市兜兜转转,下半年,不少企业普遍给出了10倍以上的开城目标。10城、15城、50城、全国,范围越来越大,实现起来也越来越难,预期规划与实际情况显然有所出入。
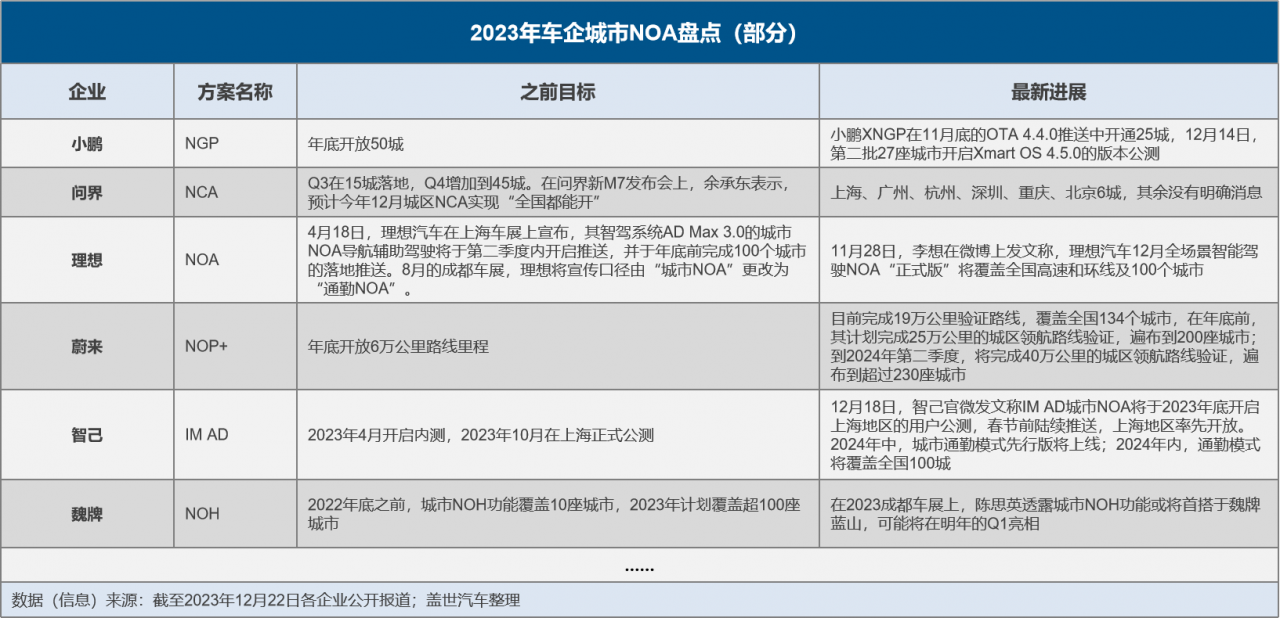
在问界新M7发布会上,余承东表示,新款问界M7搭载了HUAWEI ADS 2.0高阶智能驾驶系统,可实现不依赖于高精地图的高速、城区高阶智能驾驶,并预计今年12月城区NCA实现“全国都能开”。然而,华为NCA能得到的确切的开城消息,还停留在今年8月公布的6城,问界、阿维塔等华为系车企均未公开开城数量。
理想今年经历城市NOA和通勤NOA的来回跳转,开城进展也是情况不明,但在11月28日,李想在微博上发文称,理想汽车12月全场景智能驾驶NOA“正式版”将覆盖全国高速和环线年就宣布城市NOH功能要覆盖10座城市的魏牌,在2023成都车展上,魏牌CEO陈思英透露,城市NOH功能将在魏牌的蓝山实现,可能在明年的Q1才亮相。
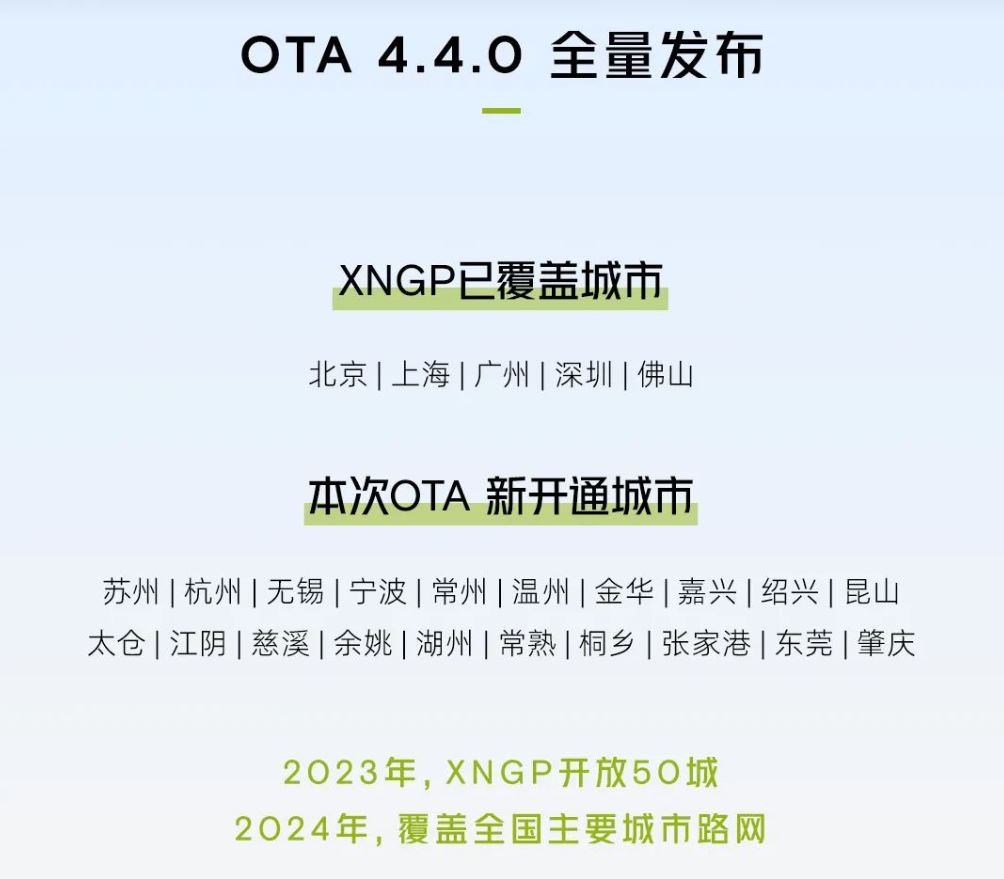
小鹏XNGP在11月底的OTA 4.4.0推送中开通25城,12月14日,小鹏官方表示第二批27座城市也即将开放,向小鹏G9、小鹏P7i的申请用户,开启Xmart OS 4.5.0的版本公测。
蔚来则另辟蹊径,选择通过按路开通、路线共享、汇线成网的拓路方式,开启城区增强领航辅助NOP+的交付。12月12日蔚来智能驾驶研发副总裁任少卿在蔚来官方App上表示,在即将全量推送的Banyan 2.3.0版本中,增强领航辅助NOP+正式更名为“全域领航辅助NOP+”,并为用户提供覆盖高速、城区和换电场景的全域领航体验。
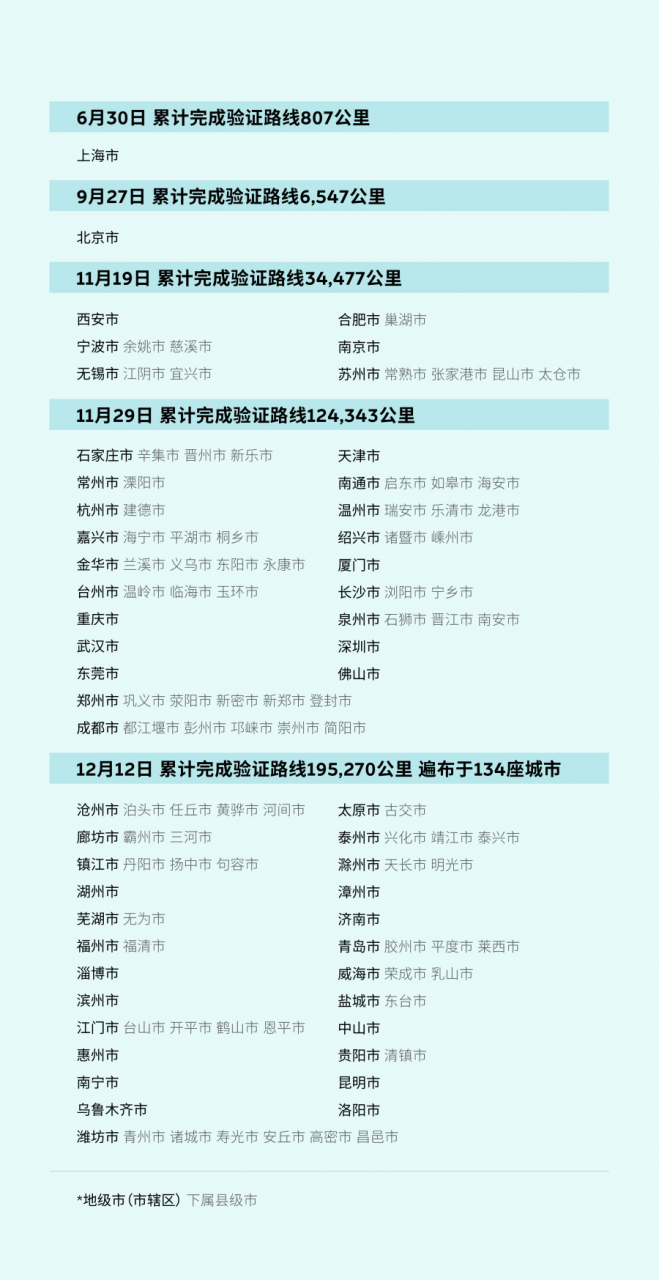
目前蔚来完成19万公里验证路线个城市,在年底前,其计划完成25万公里的城区领航路线万公里的城区领航路线年仅剩一周,不少车企画的大饼恐怕很难实现了。
相较于高速路段,城区驾驶路况更加复杂,不可预见因素更多,存在人车混行、长尾场景较多等问题,这对算法、感知硬件、计算平台等提出了更高的要求,也无疑带来成本的增加。
尽管面临诸多挑战,城市NOA仍然是当前智能驾驶最热门的现实落地场景,并直接影响车企销量。据官方数据,问界新M7大定两个半月即收获10万单,其中60%以上的用户选择智驾版,城区NCA选装率达75%。小鹏改款的G9上市15天大定超1.5万台,其中MAX版比例超过80%。
从技术层面来看,由于城市NOA的难度远超高速NOA,因此需要更强大的算力和更先进的模型来应对这些挑战。传统的L2辅助驾驶主要是依托2D视觉+CNN实现,而城市NOA则更依赖于BEV+Transformer的感知融合算法处理。2021年9月,特斯拉发布了BEV+Transformer架构,大模型开始上车。今年以来,基于城市NOA的发展需要,蔚来、理想、小鹏、毫末智行、华为等国内的新势力和供应商也纷纷大力挖掘BEV+Transformer架构的潜力。
小鹏最新的智能驾驶系统XNGP是基于小鹏自研的Xnet感知网络,走的也是视觉感知为主的BEV+Transformer大模型路线自动驾驶系统在BEV+Transformer架构的基础上,增加自研GOD网络,使得系统能够融合激光雷达、毫米波雷达、摄像头等多传感器数据,以实现有效识别异形障碍物并进而实现无高精地图智能驾驶。
值得注意的是,重感知路线普遍需要更多的传感器来保证感知层面的数据冗余,这为激光雷达企业带来利好消息,但也面临技术成本的增加,有关激光雷达感知融合和纯视觉方案的讨论甚嚣尘上。
轻舟智航产品负责人许诺认为,使用激光雷达,能够很好的提升城市复杂场景下的感知,包括对影子、通用障碍物的识别。使用激光雷达,是以投入换时间,加速城市NOA落地的捷径。目前,支持城市NOA的车型大部分都配备了激光雷达。但去激光雷达,也是诸多纯视觉和低成本方案玩家努力的方向。
今年的城市NOA发展逐步形成几个共识:一是技术路线趋向统一,BEV+Transformer架构成为核心;二是重感知、轻地图方案的盛行,车企、智驾企业和图商之间开始寻求平衡;第三,NOA要想真正大规模普及,降本是必由之路,至于激光雷达和纯视觉方案成本孰高孰低,以及无图方案减少成本与感知冗余、技术开发增加的成本如何平衡,那就是另一番考量了。
以元戎启行为例,今年3月,其推出不依赖高精度地图的智能驾驶解决方案DeepRoute-Driver 3.0,据介绍,该方案能在不使用高精度地图的前提下,仅凭导航地图就可以做到城市路段以及高速路段点到点的高阶智能驾驶。元戎启行并据此打造了D-PRO与辅助驾驶产品D-AIR两款产品,官方透露已经与多家车企达成量产合作。
一方面,自动驾驶产业链趋向完善,大算力芯片、激光雷达、大模型、中央域控等新技术的出现,为城市NOA提供了强大的底层支持。加之整车厂和零部件厂商的分工优化,正在提高产业链的效率,降低城市NOA的研发和生产成本。新的供应商和技术进入市场,打破原有的供应链格局,进一步推动城市NOA技术的发展和应用。
而城市NOA的发展需求又反过来推动了算力和算法的发展,以及供应链的变革。这种相互促进的关系在未来必将更加明显,为智驾技术的进一步发展提供了持续的动力支撑。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

