[摘要]驾驶模仿器的品种较众,本钱较贵,怎样按照利用需求拔取适宜的驾驶模仿器是如今许众汽车企业面对的困难。而对驾驶模仿器举行科学和编制性的评判是举行汽车驾驶模仿器采购选型的根蒂。如今国表里还缺乏编制性的汽车驾驶模仿器评判格式。本文重心斟酌并提出了一套汽车驾驶模仿器主客观评判格式,并将主客观评判评分结果举行加权归纳取得总体评分。所提出的评判格式能够利用正在驾驶模仿器选型之中,为企业举行驾驶模仿器采购以及后续的配置检定供应参考依照。
汽车驾驶模仿器平常由车辆及时仿真编制、运动编制、视景编制、声响模仿编制、运转监控编制、集成新闻收拾编制和数据传输编制构成[1] 。它将确切的驾驶员与虚拟车辆、虚拟场景构成驾驶员正在环测试编制,通过传神地模仿车辆正在百般工况下的车辆形态,并通过视觉、体感、触感反应和声效等式样让驾驶员对被测主意举行主客观机能评估。其特质正在于避免了对确切驾驶员行动和驾驶员主观评判的修模,而如今这两方面是很难有用修模。通过这种式样,不妨让整套测试编制与实车测试结果更为相仿,从而竣工更为有用的测试。相较实车测试,除了缩短测试本钱和周期以外,同时测试可控性和可观性更强,不妨设立百般测试场景,能够竣工告急极限测试,能存储更为足够的数据类型。
通过调研国表里的斟酌近况解释,目前相闭驾驶模仿器的评判斟酌较少,给驾驶模仿器的选型带来了困穷。通过实地视察众台驾驶模仿器,以及调研国表里文献,总结并提出了一套汽车驾驶模仿器主客观评判格式。
汽车驾驶模仿器的斟酌很早就依然发展,最早是从上个世纪60年代开头。第一个阶段是静态驾驶模仿器阶段:正在1965年,美国机器工程师协会出书一篇陈述,陈述[2]中提到驾驶员坐正在一个静止的驾驶舱内,舱前是投影仪编制,放映确切场景的彩色片子。一年后,美国人力资源斟酌机闭开荒了一套犹如的编制[3]。
第二个阶段是动态驾驶模仿器阶段。这个阶段,驾驶舱能够具备较小行程的运动。1970年代早期,德国汽车公司群众有限公司开荒的驾驶模仿器,是采用一块屏幕安设正在驾驶员座椅前,没有驾驶舱,驾驶员座椅安顿正在一个运动机构上,具备俯仰、侧倾和横摆三个自正在度。1980年,美邦交通和联邦公道收拾局,决计通过资助基于阴谋机收集组修全体交互式驾驶模仿器的可行性斟酌。1985年,戴姆勒-驰骋正在柏林-马林费尔德斟酌核心[4],修理了第一次以六足并联机构为运动根蒂的驾驶模仿器。从此,正在1990年代,马自达[5]、通用[6]、福特[7]、雷诺[8]、宝马等车企都开头修理具备全运动编制的交互式仿真的驾驶模仿器。同时间,众家国家斟酌机构,如日本汽车斟酌所[9]、英邦交通斟酌实习室[10]等,也开头纷纷修理自家的驾驶模仿器。其余,很众大学也开头修理驾驶模仿器,对比有代表性的是美国爱荷华大学驾驶模仿器[11],它采用的是波音737飞翔模仿器所利用的六足运动编制。中国吉林大学于1996年修成了包罗6个自正在度的驾驶模仿器[12],用于车辆机能计划、车载支配编制开荒等方面。

第三个阶段是带导轨大行程动态驾驶模仿器,即大幅添补了驾驶舱秤谌运动的行程(包罗前向、侧向、横摆三个对象)。正在爱荷华大学开荒的驾驶模仿器根蒂上,TRW公司对此举行了更正,并将更正后的驾驶模仿器定名为“国家高级汽车驾驶模仿器(NADS)[13]”。如图1所示,它将驾驶舱安顿正在一个直径为7.3 米的圆形舱内,圆形舱则安设正在六足运动机构上,六足运动机构下是双轴滑轨,具备19 米的秤谌纵向和侧向行程,以及330°的横摆角行程。丰田驾驶模仿器受NADS S驾驶模仿器影响,正在东富士技艺核心的驾驶模仿器采用犹如的计划,分别的是正在侧向运动行程上增至25米,纵向行程上增至35米。
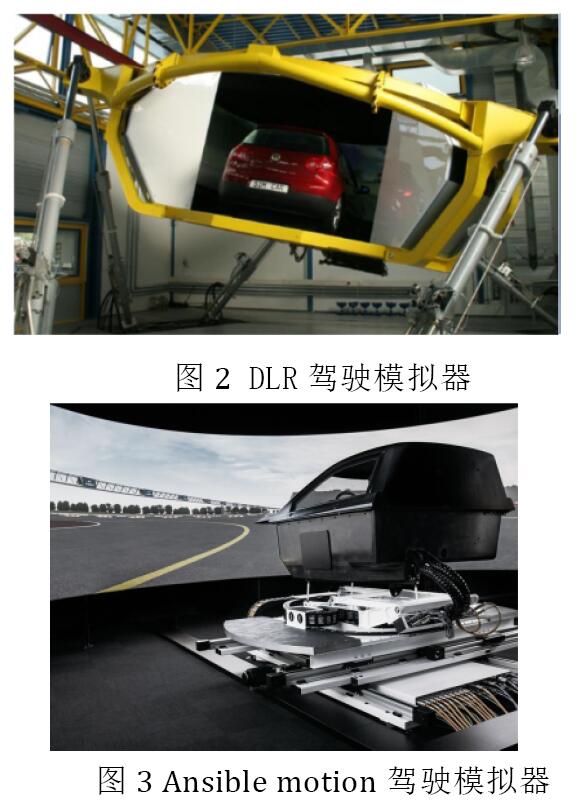
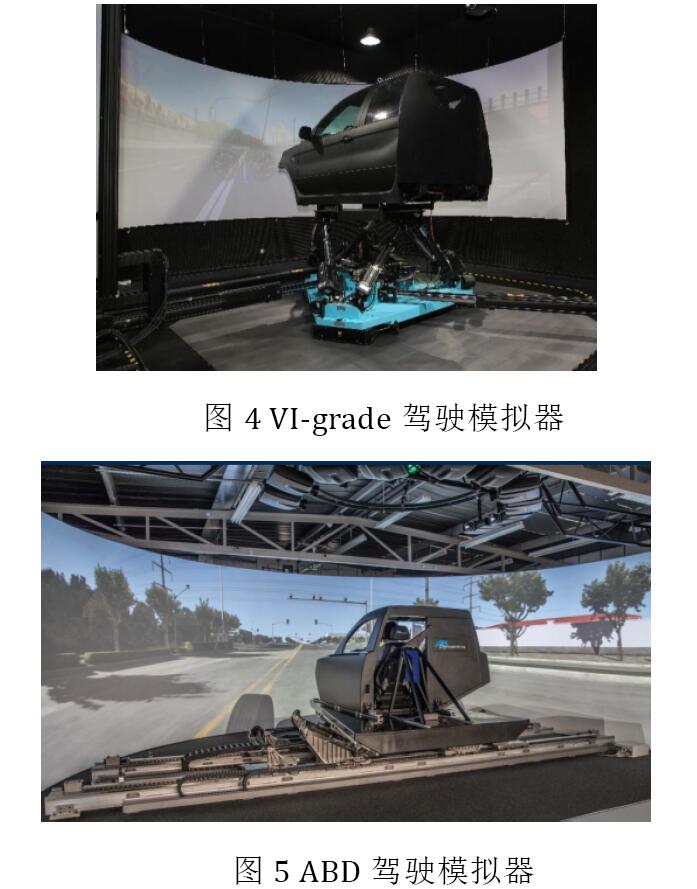
近些年,呈现越来越众百般计划类型的驾驶模仿器,紧要表示正在运动平台的计划越来越众样化。德国航天航空局(DLR R)计划的驾驶模仿器[14]如图2所示。Ansible motion公司的驾驶模仿器[15]如图3 所示。VI-grade驾驶模仿器[16]如图4 所示。Anthony Best Dynamics(ABD)驾驶模仿器[17]如图5所示。此中DLR的这种计划是将作动器的铰接到驾驶舱顶部,使回旋点尽或许逼近驾驶员头部。Ansible motion模仿器,将运动平台分成了三层,从而将车辆六向运动由三层运动机构来竣工。VI-grade 的驾驶模仿器采用两层,下部采用三足机构,举行低频大行程运动,上部采用六足机构,举行高频小行程运动。ABD驾驶模仿器没有采用分层的运动编制,而是采用8 个楔形机构举行驱动,运动编制安顿正在一个长导轨通过磁力驱动,可竣工侧向较大规模运动。
Ansible motion 的工程师Kia以为驾驶模仿器的评判能够从两个方面来评判,一方面从驾驶模仿器各个软硬件构成部门评判,另一方面通过试驾举行评判。提到软硬件编制可分为运动编制、利用用具、视景编制、阴谋机编制、音频编制等几大类举行评判;此中,运动编制包罗评判子类有运动平台、驾驶舱内辅助运动机构(座椅、主动安定带),利用用具包罗说合仿真情况、图像天生、数据存储等。试驾主观评判,紧要通过平顺性、操控性、制动性等几大类评判。
Anthony Best Dynamics 的工程师Adrian博士重心提到了驾驶模仿器运动平台的机能评判和极少试驾项目以举行驾驶模仿器机能评估。闭于运动平台的机能,提出通过行程、频率反映特征、延迟时期、线性度、相仿性、摩擦、噪音、障碍率等方面举行评判。行程这一方面,必要集合评判车辆实质运动顺序,即车辆正在分别自正在度上的行程规模,同时必要思考复合行程,即运动平台同时正在举行众个对象的运动时的行程规模。频率反映特征也必要集合车辆各个对象实质频率理解需求。延迟时期必要尽或许小,越发是必要小于人类所能感染的滞后时期。闭于怎样举行驾驶模仿器试驾,以便举行评估,Adrian 博士提到起首必要有体会的驾驶员举行足够长时期的驾驶,如许材干有用评估。质地好的驾驶模仿器,当车辆参数改革幅度较小时,比方1-2% ,试驾时就能让驾驶员感染到;质地欠好的驾驶模仿器,尽管车辆参数改动幅度很大时,许众时辰驾驶员试驾时也不行感染到。
VI-grade运动平台计划单元鹭宫制制所伊荣生以为,闭于运动平台的评判,低频受行程限值,中频受速率限值,高频受加快率限值,要是各个数值越大,对运动体感的依赖就越小。同时提出平台计划的行程,必要理解汽车正在百般道道驾驶时,三个自正在度上(Z、Roll、Pitch)的行程规模。其余,还理解了车辆正在平常驾驶处境下,幽静常道面行驶时,各个对象的加快率规模。所以必要理解运动平台的加快率规模知足车辆平常驾驶处境下的加快率央求。
吉林大学管欣老师众年来不断从事驾驶模仿器的开荒与斟酌,提出模仿器逼线]的观点,用来描画模仿器驾驶感到和实车驾驶感到的相仿处境。吉林大学段春景博士[12]以为,更正车辆动力学模子,是提拔模仿器传神度的环节症结之一。通过将驾驶模仿器中的整车动力学模子仿真数据与实车园地试验数据举行比拟是评判驾驶模仿器传神度的格式之一。段博士紧要举行了滑行试验、纵向加快试验、制动试验、运用安稳性试验方面的比拟。其余,理解了影响模仿器传神度几个方面:车辆动力学模子、仿真道面情况、硬件事业材干及子编制结婚。
英国利兹大学的Andrew 博士[18]斟酌了几个驾驶模仿器环节子编制对驾驶模仿器有用性的影响,重心包罗视景编制、前庭编制、听觉编制。视景编制方面,显示质地格外首要,包罗画面差别率,更新频率,视角。这对待驾驶员臆度车速、物体之间隔绝、车辆朝向以及侧向支配有着首要事理。前庭编制方面,前庭编制紧要与驾驶模仿器的运动编制相干,Harms[19],Duncan[10]等斟酌解释,当运动平台固定式,驾驶员正在驾驶模仿器上相对确切道道驾驶时,正在车道上地位转折更大;Siegler,Reymond[20]等人斟酌解释,与仅供应视觉新闻比拟,当运动平台存正在横向运动提示时,驾驶员会履行更大的转向。闭于音频对驾驶模仿器试驾时驾驶员行动的影响还不是很彰着。
驾驶模仿器众采用环幕投影显示编制,按照环形屏幕角度的巨细,一样有120 °至360° 不等。众通道虚拟三维投影显示编制是目前格外盛行的一种具有高度重醉感的虚拟实际显示编制,该编制以众通道视景同步技艺、数字图像角落调和技艺、众通道亮度和颜色均衡技艺为维持。
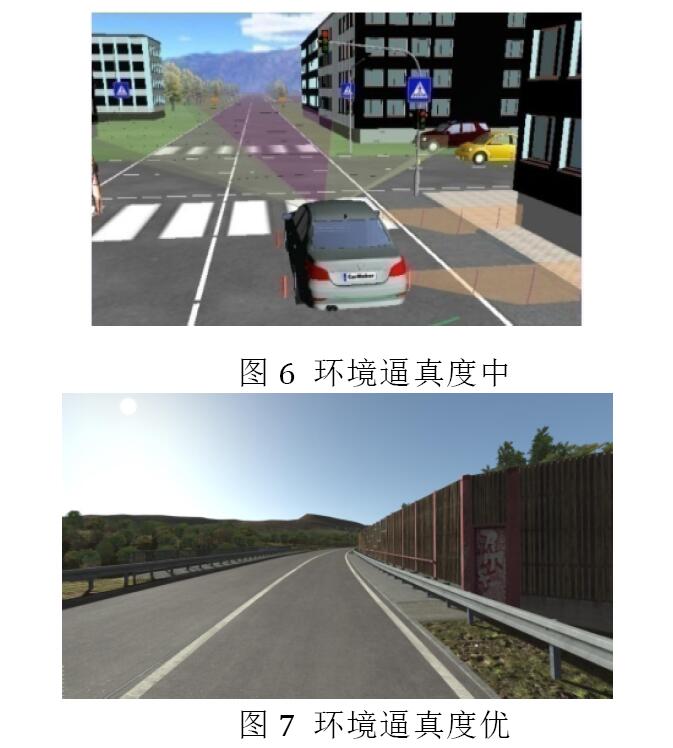
情况特质包罗两个方面:静态情况特质和动态情况特质。下面浮现了分别软件中陪衬后的视景功效。评判时,按照情况特质传神度,遵守五分制分为格外差(0-1)、差(0-2)、中(2-3)、良(3-4)、优(4-5)。此中,情况逼线 视景流利度
视景流利度的评判紧要是侦察视景的转折是否流利,是否会显现卡顿局面,帧与帧的图像是否不妨滑腻过渡。流利度紧要与视景阴谋事业站的阴谋机能相干。按照视景流利度,遵守五分制举行评分。
视景明亮度,紧要侦察并对比视景编制正在额定事业处境下,视景功效和确切情况的明亮水准,过于明亮和过于黯淡都是不适宜的。遵守五分制举行评分,越逼近线 视景拼接滑腻度
数字图像显示正在屏幕上,是由众块数字图像拼接而成,重心眷注环形屏幕数字图像之间拼接处是否滑腻,有无互相笼罩、重叠、有裂缝等局面,以及明亮水准是否相仿等。同样遵守五分制举行评分。
驾驶模仿器显示时,常采用众通道投影技艺,当显现分别步时,正在试驾时会出现环幕有些区域的图像的帧依然更新,有些区域还未更新。这一项机能的主观评分遵守五分制评分。
视景的隔绝和速率传神度也是很首要的一项视景目标。正在评判视景隔绝传神度时,对比视景中的道道两旁的电线杆与实质道道两旁
相通隔绝的电线杆,判决视觉感染上是否相仿。正在评判视景速率传神度时,紧要按照驾驶舱内仪表盘上的速率新闻和环幕中的图像转折,主观评判是否与实车相应速率下的感染相仿。这一项机能评分采用五分制。
体感是通过驾驶员耳朵内前庭举行感染,前庭编制不妨感染线性加快率和角加快率。当驾驶员正在驾驶模仿器中驾驶时,运动平台会模仿正在实车道道上驾驶时的车体运动。
纵向和俯仰两个对象的体感评判,紧要通过直线加快和制动来举行评判。评判时,初始车速为40km/h 和80km/h,然后举行蹙迫制动(1s内制动毕竟)和怠缓制动(10s 制动毕竟), 举行加快(1s 内加快毕竟)和怠缓加快(10s 内加快毕竟)。正在这些试验中,评判纵向和俯仰两个对象的体感和实车驾驶时的相仿性。
侧向、侧倾、横摆三个对象的体感评判,紧要通过运用转向举行评判,正在虚拟动态广场进步行稳态圆周试验,固定转向角度90 °稳固,渐渐添补车速。正在虚拟试验场上,依旧车速正在40km/h掌握,举行绕桩试验(或称蛇形试验)。正在此试验中,评判侧向、侧倾、横摆三个对象的体感与实车驾驶时的相仿性。
垂向、俯仰、侧倾三个对象的体感评判,紧要通过正在虚拟试验场进步行平顺性试验评判,如图8 所示。固定车速30km/h,正在平顺性测尝尝验场进步行试驾,评判垂向、俯仰、侧倾三个对象的体感与实车驾驶时的相仿性。
触感反应紧要通过对象盘力反应、制动踏板力反应、加快踏板力反应、座椅和安定带力反应来竣工。为了让驾驶员重醉感更强,正在驾驶舱内所受的力也需尽量依旧和实车驾驶时相仿。而全面力反应中,对象盘力反应最为首要,驾驶员正在试驾时必要判决是否存正在对象盘的回正力矩和道感反应力矩。
对象盘力反应,紧要举行三种工况下试验评判:1.原地转向;2. 蛇形试验;3. 比利时道面上试验。

制动踏板力反应、加快踏板力反应、座椅纵向力反应、安定带力反应,与纵向和俯仰两个对象的体感评判试验工况一律,正在此进程中举行制动踏板力反应、加快踏板力反应、座椅纵向力反应和安定带力反应评判。
座椅侧向力反应,和侧向、侧倾、横摆三个对象的体感评判试验工况一律,正在此进程中举行座椅侧向力反应评判。
正在评判胎噪和风声时,将档地位于D 档,然后渐渐加大加快踏板行程,正在车速渐渐添补时,侦察胎噪和风声是否随之添补。
驾驶传神度主观评判是一种归纳评判,是对驾驶模仿器视觉评判、体感评判、触感评判、声觉评判的归纳。
正在举行该项评判时,将拔取都市道道虚拟场景、高速公道虚拟场景、乡间道道虚拟场景、山地道道虚拟场景。让驾驶员正在四品种型的虚拟场景中举行驾驶。最终对比与实质道道驾驶的主观感染。与实质道道越逼近,以为驾驶传神度越高。此项评分也采用五分制。
对驾驶模仿器的客观评判,紧要是基于驾驶模仿器相干子编制的机能参数举行评判。驾驶模仿器的客观评判分为两类,硬件编制和软件编制。
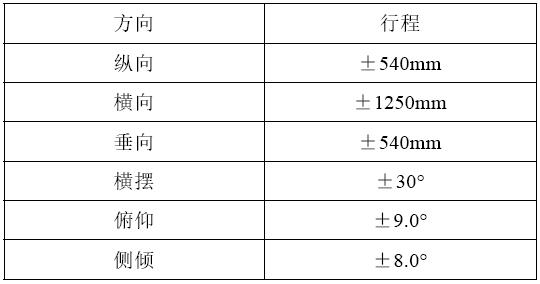
闭于运动平台,必要按照实质的平台机能参数和相干测试陈述举行评判。紧要评判如下环节方面:1. 行程规模;紧要判决驾驶模仿器运动平台的各个自正在度对象行程是否大于乘用车平常驾驶时行程。此中乘用车正在驾驶时,垂向上的行程群众正在±100mm 规模内,侧倾对象上的行程群众小于5°,俯仰对象的行程群众小于5°,思考体感运动算法的影响,侧倾对象和俯仰对象的行程大于6°即可知足央求;
2. 复合运动行程规模;紧要判决运动平台正在举行几个对象复合运动时(急加快、制动、转向等行驶工况下)的行程规模。3. 加快率规模;紧要判决驾驶模仿器的运动平台各个对象加快率是否大于乘用车驾驶时的车体加快率。斟酌解释:乘用车老手驶时,前后加快率平常小于10m/s2;掌握加快率平常小于5m/s2;垂向加快率平常小于10m/s2;4. 频率反映带宽;紧要判决驾驶模仿器的运动平台正在各个对象上的频率带宽是否知足央求。5. 频响相仿性;紧要判决驾驶模仿器的运动平台正在分别行程上,频率反映弧线.延迟机能;紧要判决驾驶模仿器的运动平台正在分别对象上的延迟响适时间。7. 平台负载材干;正在不影响平台运动反映机能时,负载材干是越大越好,意味着驾驶舱内中能够装备更众配置;8.噪音;紧要判决运动平台运动时,噪音强度巨细。9. 平台障碍率。紧要判决运动平台正在10 年内的障碍产生处境。
驾驶舱也是相闭到驾驶模仿器重醉感的环节编制之一。紧要通过如下几个方面举行评判:1. 驾驶员运用机构(制动踏板、加快踏板、换挡机构、对象盘)是否与实车相仿。2. 驾驶舱内仪表盘显示的功效是否和实车仪表盘相仿。3. 是否安设后视镜。4. 是否有驾驶员形态监测编制。5. 是否安设转向灯操作杆。
视景硬件编制,紧要包罗环屏、投影仪、图像陪衬事业站。正在举行视景编制客观评判时,紧要评判如下方面:1. 投影仪的改正频率。2. 环形屏幕上的画面差别率。3. 投影仪最大亮度。
及时阴谋机的阴谋机能决计了仿真模子和图像陪衬的阴谋时期。阴谋机能绝伦的及时阴谋机,将会有用缩短延迟时期。及时仿真阴谋机的评判紧要通过:1.CPU 核数;2.CPU 主频;3.I/O接口类型和数目。
闭于中控编制,紧要评判功效是否完全,是否包罗如下功效:1. 仿线. 数据纪录和收拾功效;3.装备各个子编制的功效;4. 开启各个编制的功效;5. 编制障碍诊断功效。
1. 仿真模子是否完全,如车辆动力学模子、驾驶员模子、车辆传感器模子、车辆支配器模子、交通情况模子、道道模子。2. 仿线. 软件是否援助模块化和用户自界说。
运动平台支配软件对待竣工运动平台的凿凿敏捷支配利害常首要的。重心评判项目包罗:1. 体感运动算法类型是否足够,以便适利用户分别的利用需求;2. 是否援助用户装备体感运动算法参数。
视景陪衬软件的评判项目包罗:1. 是否能竣工众通道同步高清输出。2. 是否援助百般气候装备。3. 是否援助动态暗影功效;4. 是否援助物理光源仿真,如车辆百般灯光功效模仿;
5. 是否援助反光功效,如湿滑道面反光。6.是否包罗物理外貌材质修模,从而援助雷达模子的探测。7. 虚拟仿真场景,交通元素和道道类型是否笼罩了中国范例道道交通情况。
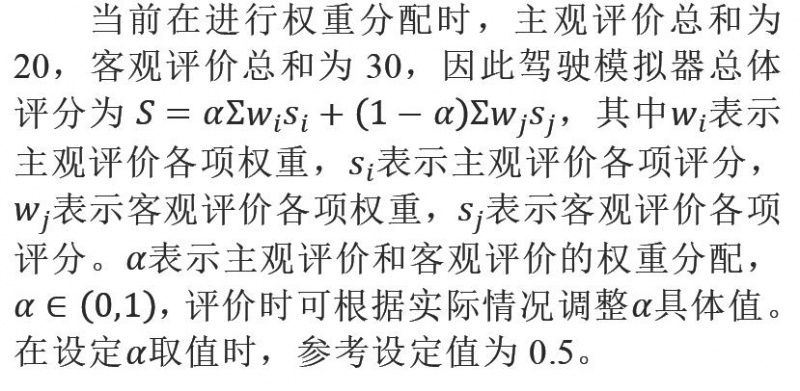
按照文中所创办的汽车驾驶模仿器主客观评判格式对一款驾驶模仿器举行逐项评判。评判的结果如下表1和表2。同时设立了各个评判项方针权重,权重的设立是按照该项评判项方针首要水准。此中评分平分子为所得分,分母为该项评分满分的分值。
前文提到车辆正在运转进程中,每每不是简单运动样式,而是复合运动样式,比方转向时,同时存正在横摆运动和侧向运动的复合运动,所以必要判决复合运动的行程,如图9 所示。有极少平台正在简单对象上的运动行程知足央求,不过复合运动行程较小。
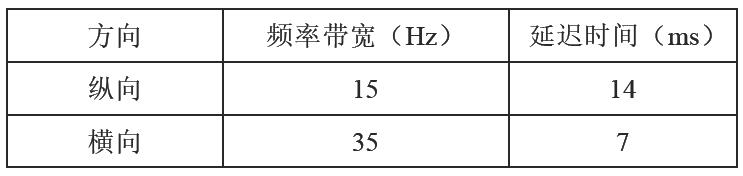
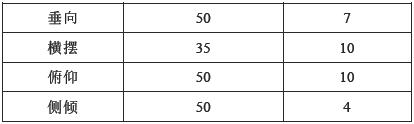
运动平台的频率反映特征是运动平台相当首要的机能特质。图10 中描画的运动平台频率反映特征的衡量格式。衡量前,将加快率计和陀螺仪安设正在驾驶员座椅正下方的运动平台上。测试时,拔取适宜的负载,如200kg。输入信号保举采用对数正弦扫频信号。正在输入输出幅频特征弧线dB时的频率点,动作频率带宽;正在输入输出相频特征弧线 °相位滞后的频率点,以此阴谋滞后时期。
本文回首了驾驶模仿器的成长进程,斟酌了国表里驾驶模仿器评判格式,正在此根蒂上总结并提出了一套汽车驾驶模仿器主客观评判格式,并将该格式利用正在了一款驾驶模仿器实质评判中,结果解释该评判格式不妨较为合理的响应驾驶模仿器机能,况且可操作性强。如今正在评判进程中所拔取的权重,跟着斟酌的长远,以及分别的需求,能够举行适宜的调解,这也是后续能够持续睁开的斟酌点。
[1]LEEWS,KIMJH,ChoJH.Adrivingsimulatorasavirtualrealitytool[C].IEEEInternationalConferenceonRoboticsandAutomation.Leuven,Belgium:IEEE,1998:71-76
valuationofadriversimulatorforsafetytraining[J].HumanResourcesResearchOrganization,Alexandria,VA,USA,1966:No.66-9
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

