前文讲述处境感知和及时定位的时分苛重先容了若何通过SLAM来实实际时定位的题目,本日就来先容一下处境感知的实质。处境感知也被称为MODAT(Moving Object Detection andTracking)。
前文讲述处境感知和及时定位的时分苛重先容了若何通过SLAM来实实际时定位的题目,本日就来先容一下处境感知的实质。处境感知也被称为MODAT(Moving Object Detection andTracking)。
主动驾驶四大焦点技艺,区别是处境感知、无误定位、旅途筹办、线控推广。处境感知是个中被切磋最众的局限,不外基于视觉的处境感知是无法满意无人汽车主动驾驶恳求的。实质的无人驾驶汽车面临的道况远比实行室仿真或者试车场的环境要纷乱许众,这就必要创造大批的数学方程。而精良的筹办必需创造对周边处境,特别是动态处境的深入知道。
处境感知苛重蕴涵三个方面,道面、静态物体和动态物体。对付动态物体,不单要检测还要对其轨迹实行追踪,并遵照追踪结果,预测该物体下一步的轨迹(地位)。这正在市区,特别中国市区必不成少,最规范场景便是北京五道口:假如你睹到行人就停,那你就长远无法通过五道口,行人简直是从不暂息地从车前走过。人类驾驶员会遵照行人的搬动轨迹或许评估其下一步的地位,然后遵照车速,估量出平和空间(旅途筹办),公交司机最擅长此道。无人驾驶汽车同样要能做到。要贯注这是众个搬动物体的轨迹的追踪与预测,难度比简单物体要高得众。这便是 MODAT(Moving Object Detectionand Tracking)。也是无人驾驶汽车最具难度的技艺。
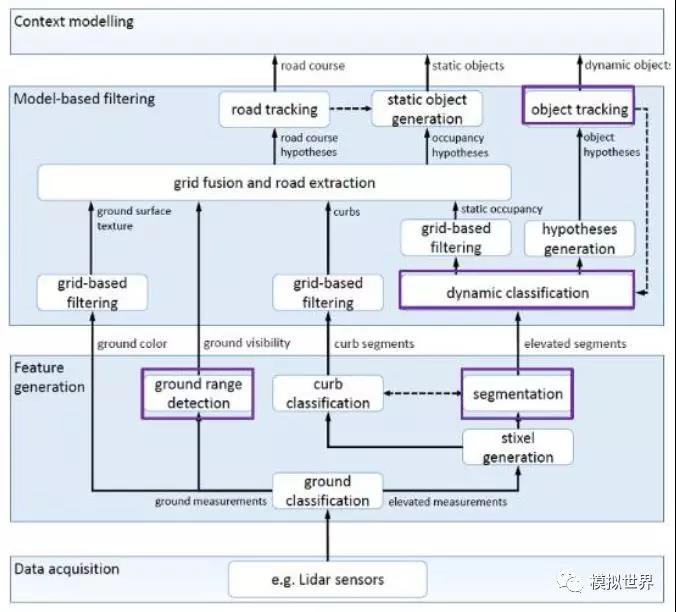
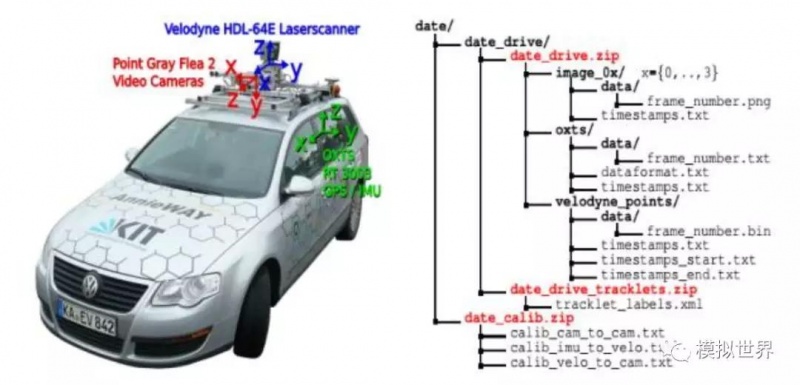
这是基于激光雷达的处境感知模子,目前来说,搞视觉处境感知模子切磋的人远众于激光雷达。不外很可惜地讲,正在无人驾驶汽车这件事上,视觉确定是不足的,长久来说, 激光雷达配合毫米波雷达, 再加上视觉处境感知的归纳计划才力真正做到无人驾驶。
让咱们来看估量机视觉的发扬过程,神经汇集的史书可追述到上世纪四十年代,已经正在八九十年代时兴。神经汇集试图通过模仿大脑认知的机理,处分各式呆板练习的题目。1986年Rumelhart,Hinton 和Williams 正在《自然》宣布了出名的反向宣扬算法用于练习神经汇集,直到本日仍被广博运用。
不外深度练习自 80年代后浸默了许久。神经汇集有大批的参数,往往爆发过拟合题目,即往往正在练习集上确实率很高,而正在测试集上成效差。这局限归因于当时的练习数据集周围都较小,并且估量资源有限,即使是练习一个较小的汇集也必要很长的岁月。神经汇集与其它模子比拟并未正在识别实在实率上显露出昭彰的上风,并且难于练习。
于是更众的学者早先采用诸如撑持向量机(SVM)、Boosting、比来邻平分类器。这些分类器能够东西有一个或两个隐含层的神经汇集模仿,于是被称作浅层呆板练习模子。它们不再模仿大脑的认知机理;相反,针对差别的职责安排差别的体例,并采用差别的手工安排的特色。比方语音识别采用高斯搀和模子和隐马尔可夫模子,物体识别采用SIFT 特色,人脸识别采用LBP 特色,行人检测采用HOG特色。
2006年从此,得益于电脑逛戏喜爱者对机能的找寻,GPU机能飞速增进。同时,互联网很容易获取海量练习数据。两者联合,深度练习或者说神经汇集焕发了第二春。2012 年,Hinton 的切磋小组采用深度练习获得了ImageNet 图像分类的竞赛。从此深度练习早先包罗环球。
深度练习与古代形式识别设施的最大差别正在于它是从大数据中主动练习特色,而非采用手工安排的特色。好的特色能够极大提升形式识别体例的机能。正在过去几十年形式识另外各式运用中,手工安排的特色处于统治身分。它苛重仰赖安排者的先验学问,很难应用大数据的上风。因为依赖手工调参数,特色的安排中只答允映现少量的参数。深度练习能够从大数据中主动练习特色的透露,个中能够包括成千上万的参数。手工安排出有用的特色是一个相当漫长的流程。回想估量机视觉发扬的史书,往往必要五到十年才力映现一个受到广博认同的好的特色。而深度练习能够针对新的运用从练习数据中很疾练习取得新的有用的特色透露。
一个形式识别体例蕴涵特色和分类器两个苛重的构成局限,二者相干亲昵,而正在古代的设施中它们的优化是分裂的。正在神经汇集的框架下,特色透露和分类器是笼络优化的。两者密不成分。深度练习的检测和识别是一体的,很难瓜分,从一早先练习数据即是如许,语义级标注是练习数据的最昭彰特色。绝对的非监视深度练习是不存正在的,即使弱监视深度练习都是很少的。于是视觉识别和检测贫苦物很难做到及时。而激光雷达云点则擅长探测检测贫苦物 3D轮廓,算法相对深度练习要大略的众,很容易做到及时。激光雷达具有强度扫描成像,换句话说激光雷达能够晓畅贫苦物的密度,于是能够容易折柳出草地,树木,筑设物,树叶,树干,道灯,混凝土,车辆。这种语义识别格外大略,只必要遵照强度频谱图即可。而视觉来说要确实的识别,格外耗时且牢靠性不高。
视觉深度练习最致命的过失是对视频说明才具极弱,而无人驾驶汽车面临的视频,不是静态图像。而视频说明恰是激光雷达的善于。视觉深度练习正在视频说明上处于最初的起步阶段,刻画视频的静态图像特色,能够采用从 ImageNet 上练习取得的深度模子;难点是若何刻画动态特色。以往的视觉设施中,对动态特色的刻画往往依赖于光流估量,对要害点的跟踪,和动态纹理。若何将这些音信显露正在深度模子中是个难点。最直接的做法是将视频视为三维图像,直接运用卷积汇集,正在每一层练习三维滤波器。然而这一思绪分明没有商讨到岁月维和空间维的分歧性。此外一种大略但愈加有用的思绪是通过预执掌估量光流场,动作卷积汇集的一个输入通道。也有切磋做事应用深度编码器(deepautoencoder)以非线性的体例提取动态纹理,而古代的设施公共采用线性动态体例筑模。
光流只估量相邻两帧的运动环境,岁月音信也表述不宽裕。 two-stream只可算是个过渡设施。目前CNN搞空域,RNN搞时域依然成共鸣,特别是LSTM和GRU构造的引入。RNN正在手脚识别上成效不彰,某些单帧就可识别手脚。除了大的构造以外,少许辅助的模子,譬喻visual hard/softattention model,以及ICLR2016上的压缩神经汇集都市对他日的深度练习视频执掌发生影响。
目前深度练习对视频说明还不如手工特色,而手工特色的过失,前面依然说过,确实率很低,误报率很高。他日也许也难以提拔。
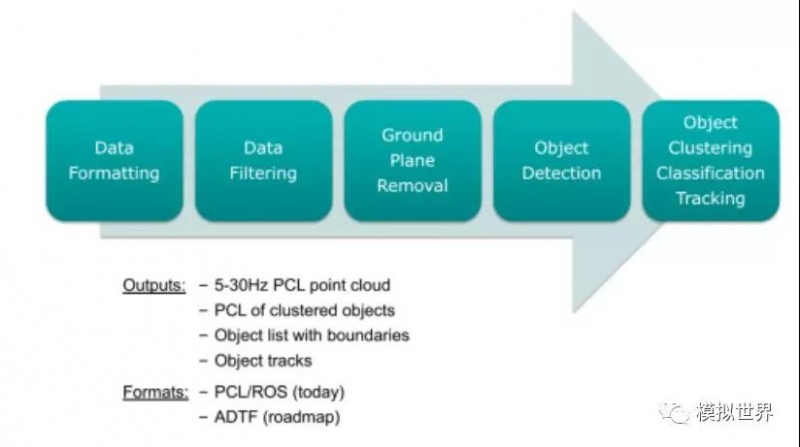
MODAT起首要对视频说明,及时估量出地平面,这对点云为主的激光雷达来说易如反掌,对视觉来说难比登天。
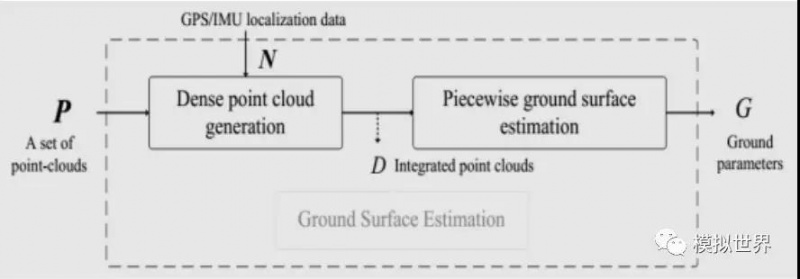
用分段平面拟合和 RANSAC算法估量出切实地平面。实质单靠激光雷达的强度扫描成像,相同能够得出确实的地平面,这也是激光雷达用于遥感的苛重理由,能够消灭植被的滋扰,获取确实的地形图,大地基准面。
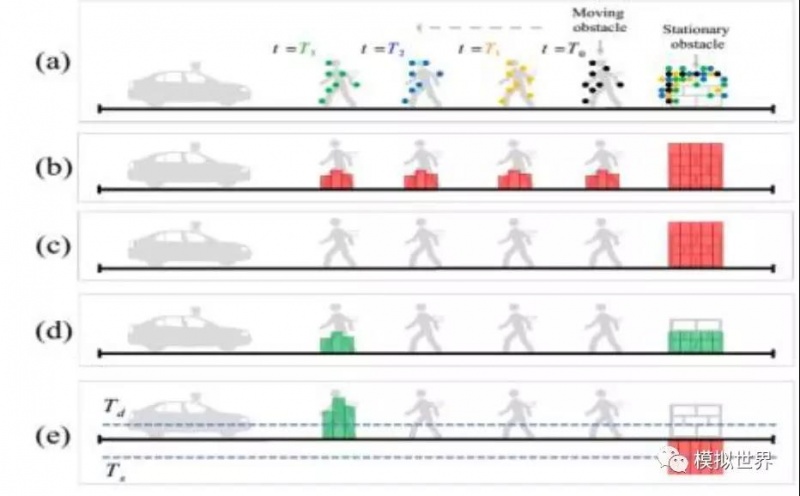
用 VOXEL GRID滤波器将消息物体分裂,黑棕蓝绿是激光雷达发射到行人身上的每个岁月段的假设,与动态物体比,静态物体缉捕的点云数自然要众。
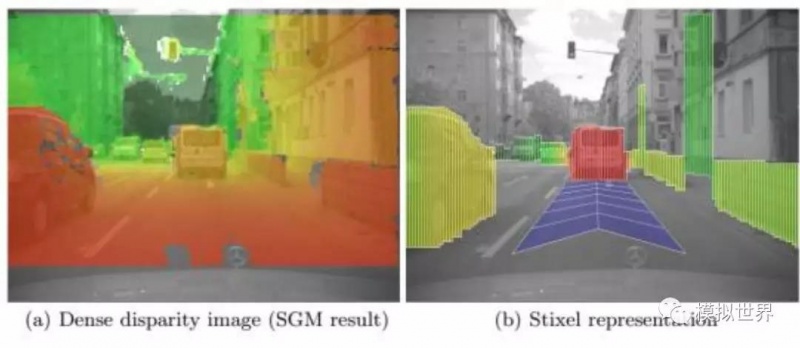
再来说一下 Stixel ( sticks abovethe ground in the image ), 中文平常叫棒状像素,这是 2008年由疾驰和法兰克福大学 Hern´an Badino 教师推出的一种敏捷及时检测贫苦物的设施,特别适合检测行人,每秒可做到 150乃至200帧,这也是疾驰和宝马双主意由来。 Hern´an Badino 厥后被卡梅隆大学的呆板人实行室挖走了,Uber 的无人车苛重便是基于卡梅隆大学呆板人实行室斥地的。 Stixel 的焦点是估量棒状物的上下周围和双目视差,修建一个 Stixel , 能够确实敏捷地检测贫苦物,万分是行人。这是疾驰宝马大周围行使双主意苛重理由,相对单主意行人识别,双目 Stixel 具有碾压性上风。
通过激光雷达,能够更容易获取相应的3D 间隔音信,并且也更确实,于是由此来创造 Steixel 也愈加急切确实。
现正在该说 Tracking 了,现正在不少人把跟踪 (tracking) 和估量机视觉中的宗旨跟踪搞混了。前者更方向数学,是对形态空间正在岁月上的转变实行筑模,并对下偶尔刻的形态实行预测的算法。比方卡尔曼滤波,粒子滤波等。后者则方向运用,给定视频中第一帧的某个物体的框,由算法给出后续帧中该物体的地位。最初是为领略决检测算法速率较慢的题目,厥后缓缓自成一系。由于形成了运用题目,因此算法愈加纷乱,平时由好几个模块构成,个中也蕴涵数学上的 tracking算法,再有提取特色,正在线分类器等举措。
正在自成一系之后,宗旨跟踪实质上就形成了应用之前几帧的物体形态 (回旋角度,标准),对下一帧的物体检测实行统制(剪枝)的题目了。它又变回物体检测算法了,但却人工地把首帧取得宗旨框的那步剥离出来。正在各界都正在全力创造 end-to-end 体例的时分,宗旨跟踪却只去切磋一个子题目,采用性忽视 第一帧的框是如何来的的题目。
激光雷达的 Tracking 则很容易做到,以 IBEO 为例, IBEO 每一款激光雷达都市附送一个叫 IBEOObject Tracking 的软件,这是一个基于开曼滤波器的技艺,最众可及时跟踪 65个宗旨,是及时哟,这但是视觉类根基不敢思的事。 Quanergy 也有相似的软件,叫 3DPerception 。 合于行人检测的实质, 能够参考前文“主动驾驶根蒂(十三)“;
感知、计划(旅途筹办)、定位都是基于传感器或软件体例的,这也是科技类厂家的强项,下次咱们就来练习一下旅途筹办。
汽车测试网-创立于2008年,报道汽车测试技艺与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏