ACC英文全称是“Adaptive Cruise Control”,中文意义是“自合适巡航节制”。 咱们先从巡航说起,凡是,巡航又分为定速巡航和自合适巡航。
ACC英文全称是“Adaptive Cruise Control”,中文意义是“自合适巡航节制”。 咱们先从巡航说起,凡是,巡航又分为定速巡航和自合适巡航。
定速巡航是汽车以必定的速率巡航,不必要驾驶员举行操作(踩油门)。定速巡航成效必要必定的速率本领进入,凡是处境下,这个速率是能够标定的,譬喻有些车标定大于50公里的时速本领够进入。进入巡航从此会有一个初始速率,譬喻50km/h,况且速率是能够通过按钮举行安排的(加,减,疾加,疾减),巡航的退出也有一系列的要求,譬喻,踩刹车时就会推出巡航。定速巡航相对来说比力粗略,没有丰富的传感器,处分器等。凡是处境下,定速巡航只合用于道况较好的处境下,譬喻高速公道等封锁道况。
自合适巡航(AAC)就比力智能,况且凡是正在较低的速率下就能够进入巡航。除了高速公道,也能合用于都市道况,走走停停都能够。
自合适巡航节制编制是一种智能化的主动节制编制,它是正在早已存正在的巡航节制本领的本原上进展而来的。正在车辆行驶历程中,安置正在车辆前部的车距传感器(雷达)接续扫描车辆火线道道,同时轮速传感器搜罗车速信号。当与前车之间的隔断过小时,ACC节制单位能够通过与制动防抱死编制、发起机节制编制和洽行为,使车轮适应制动,并使发起机的输出功率低落,以使车辆与火线车辆永远连结安适隔断。同时车内声音会发出警报声响指示走神的驾驶员注意,它能有用的提防追尾这类事变的发作。自合适巡航节制编制正在节制车辆制动时,时时会将制动减速率限度正在不影响恬逸的水平,当必要更大的减速率时,ACC节制单位会发作声光信号报告驾驶者主动采纳制动操作。当与前车之间的隔断减少到安适隔断时,ACC节制单位节制车辆遵从设定的车速行驶。
粗略地说,自合适巡航节制编制,通过汽车的传感器(雷达)搜罗的隔断消息,会依照前车以及本车的行驶形态(车距和速率),源委ECU的准备决断从此向奉行器(骨气门,制动器,档位等)发送指令,以决意本人的行驶形态,是加快仍然减速,仍然退出巡航,切换回人工驾驶。自合适巡航最根本成效是连结车辆纵向行驶,正在有碰撞危机时,车辆会提示驾驶员并举行主动制动干扰。
目前,ACC还属于一项科技含量较高的本领,目前唯有像沃尔沃、宝马之类的阔绰车装备了ACC。跟着汽车底盘零部件集成化和电子化的连接进展,ACC会像此刻比力普及的定速巡航编制雷同正在越来越众的车型中利用,并成为异日主被动安适集成中的紧急一环。
如上所述,ACC编制中,传感器的用意是显而易睹的。正在车辆行驶历程中,安置正在车辆前部的车距传感器(雷达)务必接续扫描车辆火线道道。目前常用的传感器有雷达(长距毫米波雷达和激光雷达等),超声波测距传感器,红外测距传感器,视频传感器等。
正在ACC编制中,传感器就相当于驾驶员的“眼睛”。对付眼睛来说,枢纽是要识别正在本车道的前车,排出旁边车道车辆的影响。借使是正在都市道道行驶,还务必识别行人等其他大概正在道道上浮现的目的对象。
眼睛采纳到信号后,就通报给汽车大脑中的ACC 巡航节制编制,该编制会盘问一系列规章轨制,以决意汽车该怎样行驶,这些规章轨制便是ACC中的节制政策。
安适车距模子(意义便是汽车跟前车连结众少距聚散适)是ACC编制节制的首要节制政策之一;他不行过大,不然会导致你后头车辆的抗议;不行过小,不然有追尾危急;安适车距是最小泊车隔断与而今车速的函数。安适隔断,原来并不是一个固定的长度单元,而是所谓的TTC,time to collsion,即假设连结而今相对速率,两车发作追尾所必要的时期。
正在大脑告诉了汽车该怎样做之后,接下来便是奉行机构的事了,奉行机构相当于汽车的“举动”。奉行机构囊括骨气门,制动,档位。通过这些机构的行为,对汽车举行操控。
自合适巡航举动一种驾驶辅助,终于不行做到像人雷同的智能,能阔别一共的道况,且能做出最优的实时响应。目前ACC还首要用正在道况较好的道道(高速或高架),况且是首要针对主车道目的车辆的决断。而对付旁车道,以及众目的车辆的监测;有并线妄图的车辆的预判,还做得亏损。譬喻前车蓦地进入弯道,这时本车大概会以为安适隔断过大,浮现误判而蓦地加快进入弯道。
2. 当雷达监测局限内浮现车辆时,借使车速过高,此时汽车会减速,并必定的车速随同前车行驶,连结安适隔断;若前车又切出本车道,则本车会主动加快至设定车速。
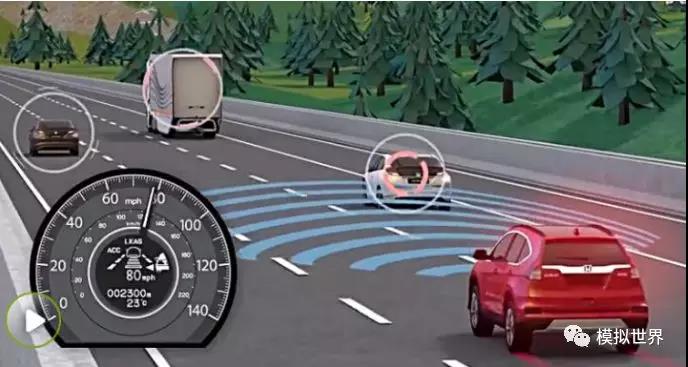
ACC 巡航节制编制中,对付定速巡航的形态,节制电控单位有两个输入信号,当测出的实践车速高于或低于驾驶员调定的车速时,电控单位将这两种信号举行比力,得出两信号之差,即偏差信号,再经放大、处分后成为油门节制信号,送至油门奉行器,驱动油门奉行器行为,安排发起机油门开度,以更正两输入车速信号的偏差,从而使实践车速很疾复兴到驾驶员设定的车速,并连结恒定。 如下图,火线车道无车,此时车速是80km/h,做定速巡航。
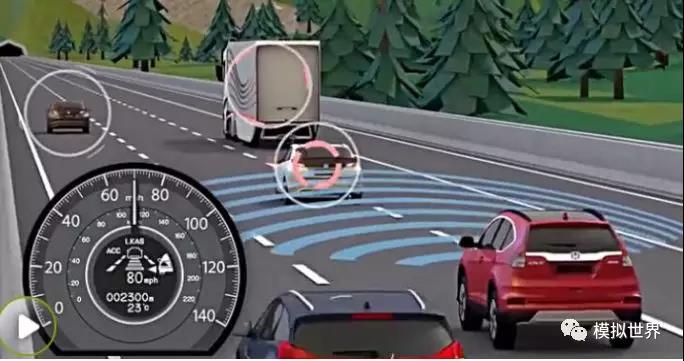
而下图中,,火线车道浮现车辆,ACC做自合适巡航节制,依照前车车速以及和前车的车距,做自合适巡航车速节制,车速低落。
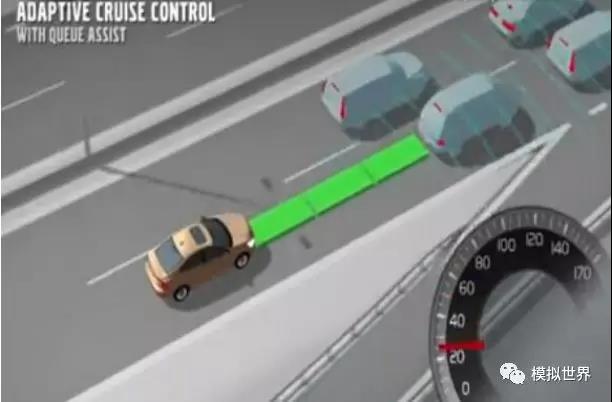
而今车变向时,汽车会调换跟车目的;此外,有些ACC自合适巡航编制带停走成效(主动启停编制,Start Stop),会正在汽车低速,以至静止也能启用,这点正在走走停停的都市工况比力有效。该编制正在低速时仍或许连结与前车的隔断,并或许对汽车制动,直至静止,正在几秒后,借使前车起动,ACC也会主动随同启动;借使停息时期较长,只需驾驶员轻践踏板则或许再次进入巡航形式;
要竣工带停走成效的ACC,时时还必要摄像头的辅助,由于雷达识别目的的才力固然强,然而受到杂波搅扰极端厉害,仍然必要摄像头的图像识别成效来确认目的。而Mobileye公司的产物以至能够只用摄像头竣工ACC。同时,跟车到泊车从此,绝大个别厂商的政策是务必由驾驶员确认之后本领再次起步,能够是按键确认,也能够是踩油门确认。下图中为都市工况,此时车速25km/h:


借使进入弯道时,汽车会依照弯道的处境而调剂车速;长距雷达的视野较小,弯道半径过大大概会失落目的,于是目前最上等级的ACC也仅对150m以上的弯道半径做机能条件。
自合适巡航定速节制编制的雷达传感器借使只可检测车辆前面渺小的锥形区域内的物体,那么,对膺惩物的检测大概会受到限度。编制大概无法实时制动,或有大概不料制动。
借使其他车辆正正在驶入和驶出ACC 车辆所正在的车道,则这些车辆唯有正在十足处于相应车道上时才会被检测到。有岁月无法检测到或无法实时检测到很窄或很小的车辆。借使是投影较大的车辆(比方木料运输车),则无法准确检测到该车的尾部。

说到ACC的好处,分明,正在必定水平上,ACC能够减轻驾驶员驾驶的疲困。ACC编制加上车道偏离辅助编制,能够让你正在较好的都市道况中极大的解放双脚以至双手。
ACC举动智能驾驶本领,将会是异日汽车进展偏向,就像无人驾驶雷同,然而机械永远是机械,并不行十足庖代人类,再智能的驾驶也只是辅助驾驶,不行十足依赖和信赖。况且AAC成效的机能很大水平上依赖于车载传感器, 奇特是雷达的检测隔断和检测精度。后文咱们会对雷达做详明先容, 囊括毫米波雷达和激光雷达。
汽车测试网-树立于2008年,报道汽车测试本领与产物、趋向、动态等 相干邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

