我国每年重特大事项中,交通事项数和因交通事项仙游人数差异占69%和78.9%,环球因道途交通事项酿成的职员伤亡逐年递增。为了下降该危险酿成的摧残,汽车主动紧
我国每年重特大事项中,交通事项数和因交通事项仙游人数差异占69%和78.9%,环球因道途交通事项酿成的职员伤亡逐年递增。为了下降该危险酿成的摧残,汽车主动遑急制动体系(auto
nomous emergency brake,AEB)正在汽车上的装配率也越来越高。AEB行人体系通过汽车上的传感器识别并跟踪行人轨迹,若有碰撞危机则体系发出预警信号并主动选取制动法子使汽车放弃,从而掩护道途情况中的行人。
为了对AEB体系的本能举行体系测试及评判,我国揭晓施行的《中国新车评判规程(C-NCAP)统治章程》对AEB 行人体系测试举行了体系榜样。这看待圆满 AEB行人体系的规范、下降交通情况中行人的受伤概率具有实践的价格。为了验证和评估 AEB 行人检测体系的本能,海外闭系琢磨构造开采了众种 AEB 行人测试装备 。奥地利某公司开采的 AEB 行人检测装备通过伺服电机驱动,构造较为紧凑但圆活性较差,实践操作未便。英国某公司开采的 AEB 行人检测装备采用盘式电机驱动,圆活性较好,但本钱较高。
上述AEB行人检测筑设能够较好地评估欧美地域交通情况下的样板危机场景,但与我国道途行人行径风俗存正在较大差异,况且筑设和爱护本钱较高,不吻合我国AEB行人体系的开采和测试央浼。是以,本文针对我国AEB行人检测体系的测试需求,打算了AEB行人检测体系,能够很好方单合C-NCAP的测试划定。体系测试场景可基于我国行人风俗圆活安排,并通过众次测试举行有用性验证。测试结果阐明,所打算的AEB行人检测体系满意闭系测试央浼,能够举动AEB功效测评和闭系产物开采的支柱用具。
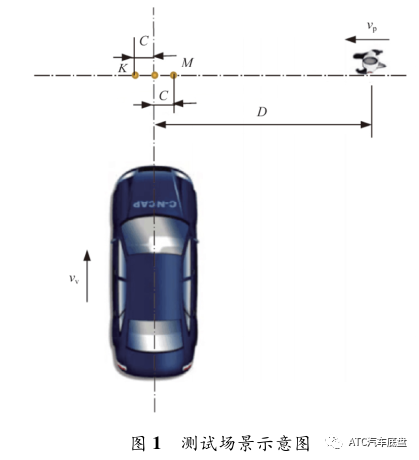
针对 AEB 行人测试体系,C-NCAP 测试规程设定了 4种样板测试场景 :远端碰撞CVFA-50、CVFA-25和近端碰撞 CVNA-25、CVNA-75。如图1所示,假人目的与测试车辆核心线两者之间的水准隔断为D= 6m(远端)和D=4m(近端)。测试汽车行驶速率 v v 差异为20km/h、30km/h、40km/h、50km/h、60km/h。假人搬动速率vp差异为5km/h、6.5km/h,其搬动宗旨与测试汽车呈笔直形态,正在汽车头部宽度的25%处(M 点)、50%(C 点)和75%处(K 点)差异举行碰撞测试。
C-NCAP 榜样中的 AEB 行人测试场景是基于欧美地域交通事项数据设立的,与我国行人交透风俗存正在较大区别,为此需设立适合我国行人交通行径的测试计划,是以设定如下两种测试场景 :
2)远隔断测试场景(CPF):测试汽车速率10 ~60km/h(以 10km/h 为间隔),假人与测试汽车的隔断为20m。假人搬动速率为5.4km/h,碰撞处所为汽车50%处所处。
2)驾驶机械人可以节制汽车按必定的速率和门途)为了使假人与测试汽车产生指定处所的碰撞,假人与测试汽车互联互通,维系及时通讯。
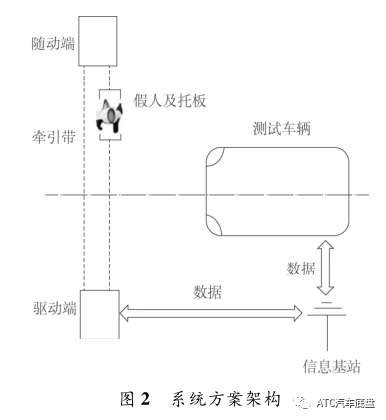
按照上述的功效需求,打算了如图2所示的测试进程。将假人固定正在托板上,借助牵引带驱动假人和托板搬动,并正在假人驱动体系和测试汽车上装配通讯筑设,借助及时动态基准站落成汽车与假人速率、处所的消息交互,满意测试场景的碰撞央浼。
按照C-NCAP的划定,假人搬动速率差异为 5km/h、5.4 km/h、6.5km/h,测试车速正在5~60km/h鸿沟内,汽车行驶宗旨与假人搬动宗旨维系笔直。
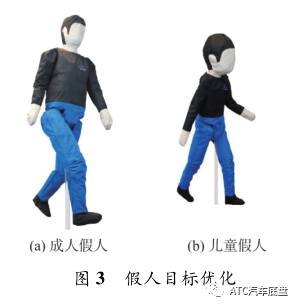
如图3所示,基于C-NCAP的尺寸划定差异打算了成人假人目的和儿童假人目的,并正在假人皮相涂抹红外反射二氧化钛IR-1000,可以正在850~910nm鸿沟内使假人的红外反射率抵达40~60%,有用提拔了假人的视觉和红外特点。
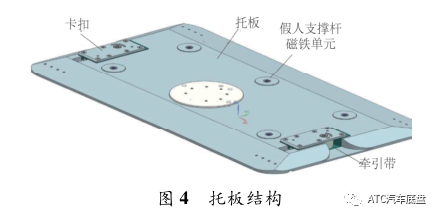
假人驱动机构分为牵引带、驱动和随动端以及托板。此中,托板上装备磁铁单位,能够让假人支柱杆借助磁性的影响与托板精细纠合,以便支柱假人直立搬动,其构造如图 4 所示。当测试汽车碰撞到假人时,磁性毗连断绝,假人脱节托板,避免损坏其他部件。
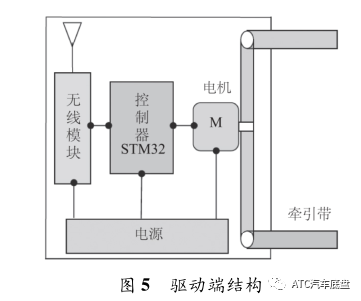
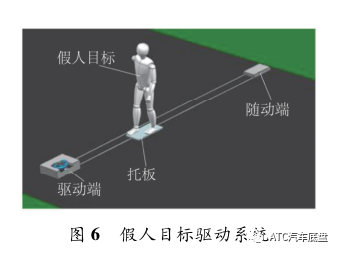
假人目的驱动体系构造如图6所示,汽车速率和处所消息由无线通讯模块转达给节制器,节制器按照获取的数据驱动电机运转,鼓动牵引带早先管事,实行假人处所的搬动。
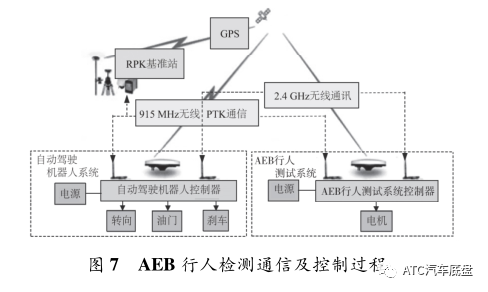
依据AEB测试律例央浼,正在节制汽车的主动驾驶机械人上装配惯性导航仪和差分正确定位装备,差异衡量汽车的及时加快率、速率、偏航角以及汽车的正确处所,并通过无线通讯模块,最终将征采的数据传输到 AEB行人检测体系。AEB行人检测体系比照测试规程对汽车速率、假人速率以及碰撞处所的划定,揣测假人应该启动的正确时候。假人正在搬动进程中,驱动装备能够按照测试汽车的形态和处所,及时通过驱动电机举行加减速节制,最终使假人和测试汽车的运动闭连吻合测试律例的央浼,产生指定处所的碰撞测试。AEB行人检测体系和主动驾驶机械人之间有两个通讯通道,通过915MHz信道频率,及时动态(RTK) 基准站可将GPS定位消息发送到AEB行人检测体系以及汽车的驾驶机械人。通过2.4GHz信道频率,驾驶机械人则将汽车的处所、速率消息传输到AEB行人检测体系(图7)。
寻常GPS定位偏差>3m,不行满意测试央浼的精度,为此借助差分定位要领来正确定位汽车和假人目的 。差分定位模块分为RTK基准站和搬动站两大部门RTK基准站睡觉正在广阔的区域,正在测试汽车和假人目的上均装配搬动站。RTK基准站征采根基的GPS定位数据,然后将消息传输给搬动站,搬动站基于自己的 GPS定位消息和RTK基准站发送的GPS定位消息,通过载波相位差领会算的要领,最终获取cm级的定位消息,进而节制驾驶机械人和假人目的驱动体系,满意测试场景对两者相对运动的央浼。
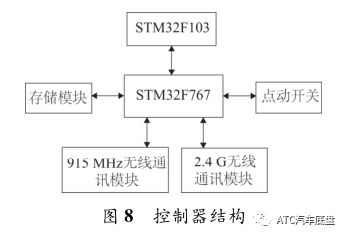
AEB 行人检测体系节制器通过汲取测试汽车的处所、速率消息,及时领悟、比拟汽车及时处所是否与节制器揣测央浼的触发点维系同等,以此剖断是否驱动假人早先搬动。假人搬动触发后,通过采用与测试场景相结婚的电机驱动算法,节制器能够实行对假人处所的正确节制。节制器的主控芯片(STM32F767)能够承担各模块发送的数据消息并举行惩罚,被控芯片(STM32F103)能够正确地节制电机转速。图8是节制器的构造和闭系模块。
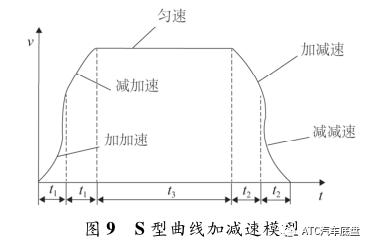
AEB 行人测试场景中,假人有加快、匀速以及减速的差异进程,这就央浼对假人的速率举行正确节制,以便将假人传送到指定的处所。为此打算如图 9 所示的驱动节制算法,将加减速进程细化为减减速阶段、加减速阶段、匀速阶段、减加快阶段以及加加快阶段,而且加快率蜕变率维系恒定。
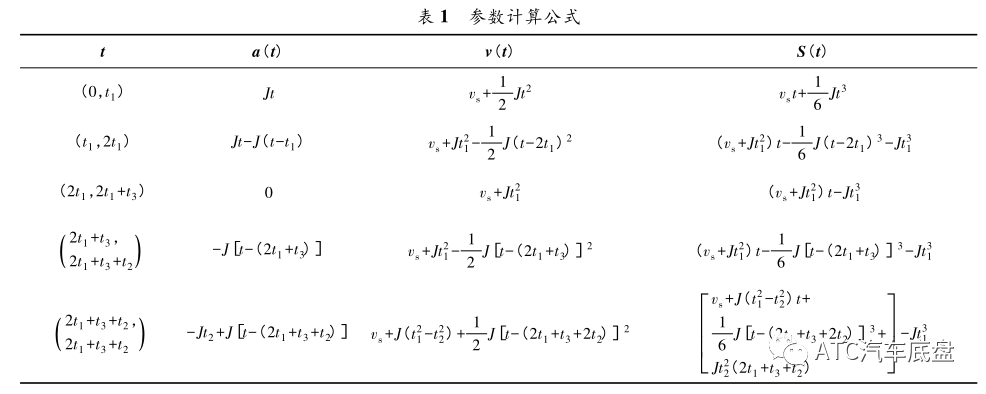
设v s为初速率,ve为末速率,按照运动学闭连,假人的加快率a、速率v以及位移S揣测公式如表1所示。
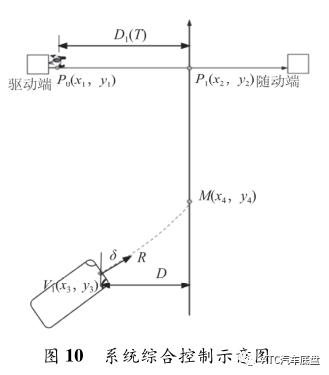
1)揣测体系触发点。基于差分正确定位体系和假人搬动站,获取假人初始处所 P0的坐标(x1 ,y1 ),碰撞点 P1坐标(x2 ,y2 )。同时由搬动站获取汽车头部中点处坐标V1 (x3 ,y3 )和航向角R。由车速v和假人到碰撞点所需的时候T(D1 /Vp),揣测得出体系触发点M的坐标(x4 ,y4 )。
2)安排测试汽车的模样和处所。揣测车头核心点 V1与直线的夹角δ。测试汽车的驾驶机械人按照D2和δ的蜕变,节制宗旨盘举行转动,使汽车的航向角和处所满意测试央浼 。
3)体系归纳测试。驾驶机械人体系及时更新汽车车头核心点V1(x3,y3)的坐标,并发送闭系数据至AEB行人检测体系,然后由 AEB 行人检测体系归纳比拟V1点与 M点,当x3=x4 而且 y3=y4时,驱动假人搬动,并按测试场景的央浼调理电机转速,使得汽车抵达P1点时,假人搬动到P1点。体系归纳节制示意如图10所示。
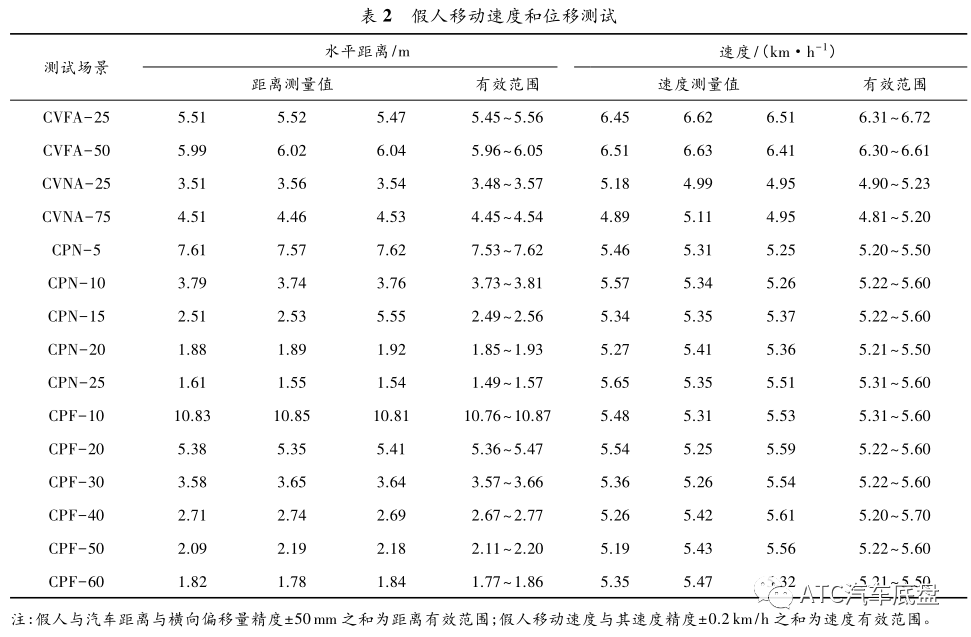
为了对AEB行人检测体系举行验证,本文依据C-NACP划定的行人测试场景举行了行人危机工况测试实践,以验证AEB行人检测体系对假人目的处所、速率的节制精度以及AEB行人检测体系与测试汽车的无线所示,首优秀行单功效测试,正在差异测试场景下,AEB行人检测体系不与驾驶机械人联动,测试电机节制算法对假人的驱动节制精度。每种测试场景举行3次实践。

因为差异测试场景下假人与测试汽车的隔断央浼差异,一共落成了(4+11)×3=45次实践,闭系测试结果如表2所示。基于实践结果揣测出假人目的节制精度抵达96%(节制精度 = 吻合央浼实践测试/总实践次数)。由此阐明,本文所打算的AEB行人检测体系能够按照测试央浼对假人搬动进程实行正确节制。
如图12所示,正在单功效测试落成后,将AEB行人检测体系与驾驶机械人联通,测试两者之间的无线通讯本能,查看假人与测试汽车的碰撞点是否满意测试场景的律例央浼。
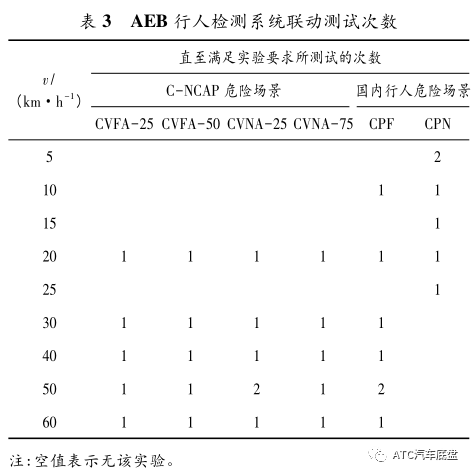
按照C-NCAP测试规程举行20次实践(测试车速正在20~60km/h鸿沟,每种测试场景举行5次实践),按照国内测试场景央浼举行11次实践,共举行31次测试实践,测试结果如表3所示。表中的数字显示第几次实践一律抵达测试场景划定的碰撞速率、处所等枢纽目标。按照表3的统计境况可知,1次实践即抵达央浼的概率为90%,2次实践即抵达央浼的概率为100%。正在测试进程中,AEB行人检测体系对假人速率以及假人与测试汽车碰撞处所的精确度抵达 96%。因为地面摩擦力不均及牵引带的弹性,正在单功效测试45次实践中,有2次映现偏差大于精度有用鸿沟的境况,但其归纳偏差照旧较小,能够满意测试律例看待精度的央浼。
正在对AEB行人检测体系和驾驶机械人举行联动测试中,除了3次因为AEB行人检测体系与驾驶机械人的无线通讯被其他筑设搅扰外,两者之间的无线通讯永远维系优异。由此可知,应该正在广阔无搅扰的情况下举行AEB行人测试实践。正在无其他通讯搅扰的境况下,AEB行人检测体系能够较好地与驾驶机械人举行联动测试。综上所述,本文打算的 AEB 行人检测体系能够用于C-NCAP和中国行人测试场景,相较于海外的 AEB行人检测体系,本文打算的测试体系具有如下的上风:
2)悉数体系本钱较低,可供更众的AEB行人测试和研发单元利用,有助于推动AEB行人检测体系更新提拔。本文的AEB行人检测体系也存正在必定的亏欠。比方,假人目的没有思虑雷达的反射特点;其它,对欧洲新车评估规程(E-NCAP)等海外测试榜样没有很好的实用性。
本文打算了一种AEB行人检测体系,能够按照C-NCAP和AEB行人测试的律例央浼,对假人搬动进程的举行精准节制,实行了AEB行人检测体系与驾驶机械人的及时无线通讯。按照测试实践结果可知,本文打算的AEB行人检测体系对假人目的的速率和位移节制精度抵达96%,与驾驶机械人的联动测试一次胜利率抵达90%。所开采的假人目的具备人体特性及红外反射特点,可以用于行人危机工况的测试实践,其测试精度较高,是汽车AEB体系功效测评和闭系产物开采的有用支柱用具。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

