虚拟仿真技能是汽车研发、创制、验证测试等合键不成或缺的技能方式,能有用缩短技能和产物开荒周期,下降研发本钱;跟着汽车智能化、网联化趋向的成长,虚拟仿真技能有了更大的阐明空间,好比自愿驾驶体系的仿真测试验证;虚拟仿真测试是完成高阶自愿驾驶落地操纵的合节一环,具备自愿驾驶效用的车辆务必颠末大方的虚拟仿真测试以及实车道测之后本领商用化;
自愿驾驶仿真测试:紧要是以数学筑模的形式将自愿驾驶的操纵场景举办数字化还原,筑筑尽或许迫近可靠全国的体系模子,无需实车直接通过软件举办仿真测试便可抵达对自愿驾驶体系及算法的测试验证方针。
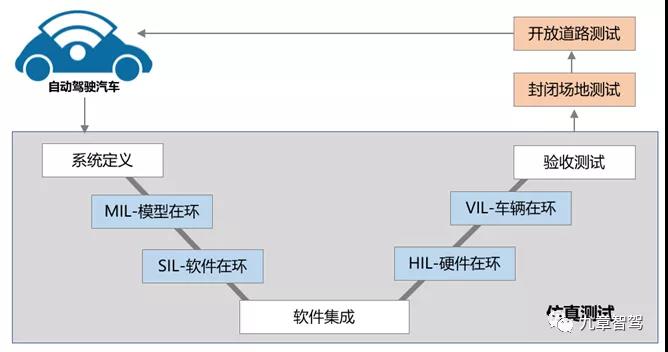
仿真测试包罗以下几品种型:模子正在环仿真(MIL)— 软件正在环仿真(SIL)— 硬件正在环仿真(HIL)— 整车正在环仿真(VIL)
据美国兰德公司查究:一套自愿驾驶体系起码须要通过110亿英里的驾驶数据来举办体系和算法的测试验证本领抵达量产的条目;是以纯净依赖实车道测极难实行这一方向,而且实车道测还存正在以下题目:
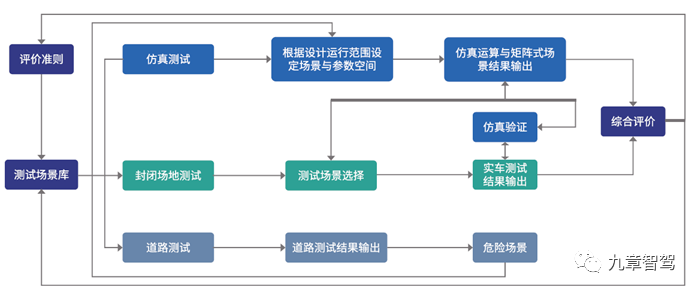
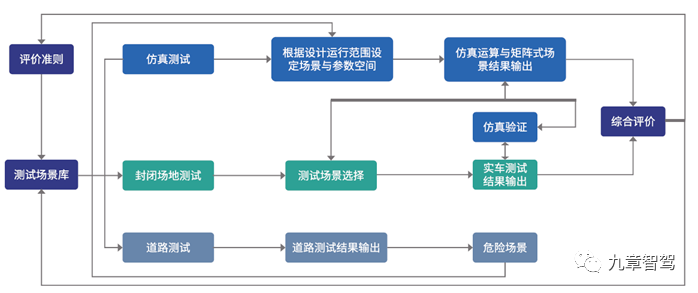
仿真测试、封锁场所测试、绽放道道测试三者之间彼此填充,造成测试闭环,合伙鼓动自愿驾驶车辆的研发和程序编制筑筑:
2)通过道道测试得出的危机场景,将会反应到仿真测试中,便可有针对性的去调节设定场景和参数空间;
3)仿真测试和封锁场所测试的最终结果要举办归纳评判,基于评判结果延续地去完整评判规矩和测试场景库。
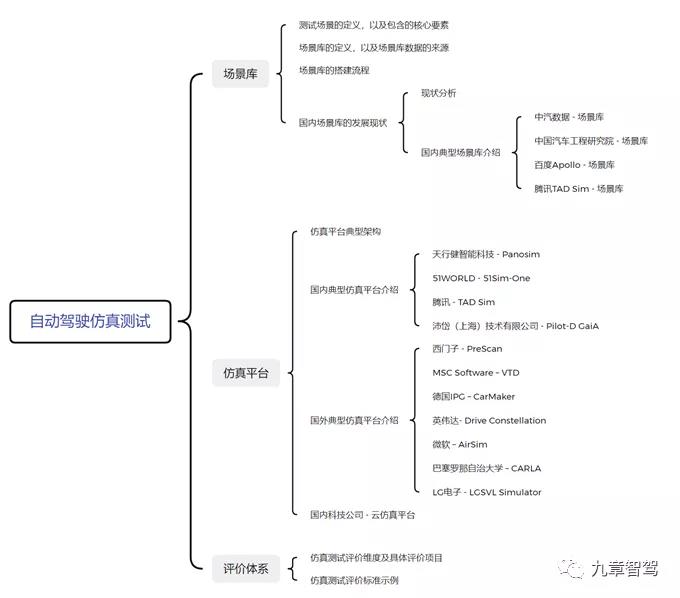
自愿驾驶仿真测试的主要组成:场景库、仿真平台、评判编制;此中,场景库是根蒂,仿真平台是重心,评判编制是合节;三者慎密耦合,互相鼓动:场景库的兴办须要仿真平台和评判编制行为引导,仿真平台的成长进化须要场景库和评判编制行为支持,而评判编制的筑筑和完整也须要以现有的场景库和仿真平台行为参考根蒂;接下来笔者将从场景库、仿真平台、评判编制这三个主要方面顺序打开来先容。
自愿驾驶测试场景界说:自愿驾驶汽车与其行驶处境各构成因素正在一段功夫内的总体动态描摹,因素构成由所盼望磨练的自愿驾驶汽车的效用决策;(界说引自:中汽协群众程序-自愿驾驶体系效用测试第7部门 – 仿真测试)简言之,场景可能被视为是自愿驾驶汽车行驶地方与驾驶现象的有机组合。具有场景无尽丰厚、极其庞杂、难以预测、不成穷尽等特性。
测试场景因素:测试车辆自己因素以及外部处境因素;外部处境因素又包罗:静态处境因素、动态处境因素、交通插足者因素、形象因素等。
汽车测试网-创造于2008年,报道汽车测试技能与产物、趋向、动态等 干系邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
