正在ADAS/AD仿真测试中,众传感器协调仍然成为L3级别以上的ADAS/AD测试的主流管理计划。通过利用摄像头、毫米波雷达、激光雷达和超声波雷达等区别的传感器,安设正在车身的区别处所。
这些传感器相同人的感官体例,主动感知界限的境遇。通过网罗数据、举行静态和动态的物体分辩、探测和追踪,并连系导航仪等舆图数据,举行体例的运算和分解,从而预先让驾驶者察觉到恐怕爆发的危殆,有用加添汽车行驶的安然性和智能舒服性。
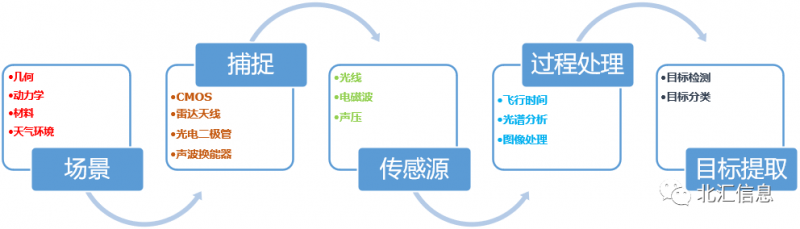
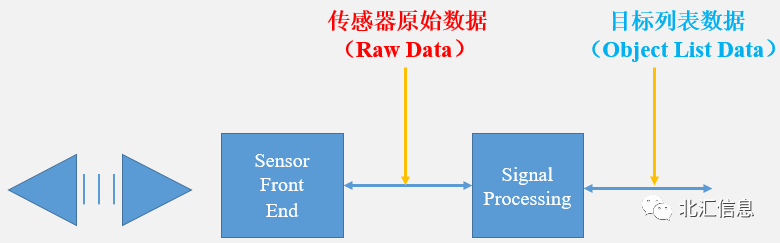
正在ADAS传感感知方面,区别信号级另外传感器信号如下图1所示,从境遇场景中感知确凿传感器前端的光、电、声信号,到数字信号管理后获得的飞翔时代、众普勒频移等原始信号,最终源委感知算法和标的跟踪获得的标的列表信号。
天生的标的列表与传感器的物理特色无合,此类传感器极度容易举行参数摆设,首要用于火速原型/观念验证。
如高精度雷达传感器切磋到标的RCS、回波损耗、信噪比、区别天色信号衰减和标的遮挡等物理特色,较量接近确凿传感模子。
可通过传感器的分辩单位对两个对象的协调举行筑模,而且还蕴涵延迟和噪声。正在境遇感知方面,具有散播衰减的特色。高精度传感器首要用于效用斥地/测试。
原始信号传感器能够输出区别的物理成果。如雷达原始数据传感器可天生天线增益图(主天线和俯仰角天线),并协调天线增益图,以此体例来筑模。原始信号传感器首要用于部件级/原始信号管理斥地与测试。
跟着雷达手艺的兴盛,雷达的工作不单仅是丈量标的的间隔、方位和仰角,况且还蕴涵丈量标的的速率,以及从标的回波中获取更众相合标的的消息。
雷达感知行为ADAS感知体例的紧要构成局限,优秀的雷达职能为ADAS测试供应越发确实的境遇感知消息,有利于ADAS体例计划策划,从而局限车辆转向体例,制动体例和动力体例,举行预警和主动干涉局限。
于是,正在ADAS测试流程中,雷达的感知算法和标的分类算法测试不行或缺,雷达感知正在ACC自适当巡航、BSD盲点探测、前碰撞预警FCW等实质使用中较量通俗。
为了更体例的解析雷达感知的实质,下面就来解析下:怎么基于原始数据流来举行雷达算法的感知测试?
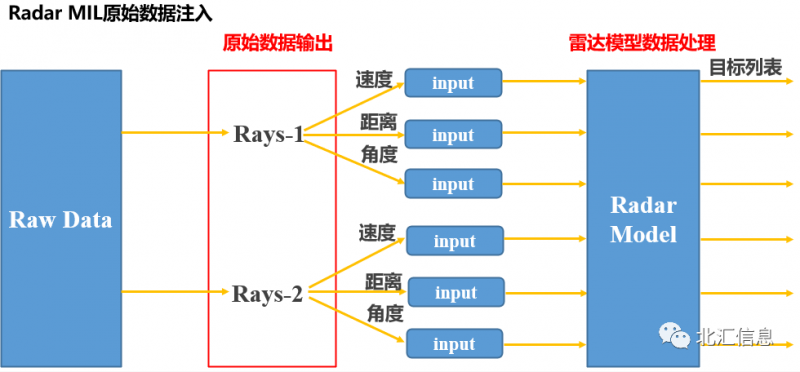
本次涉及的雷达原始数据是由火速傅里叶变换(FFT)的数据输出,未源委雷达算法信号管理,即还未举行点凝结和追踪的数据。原始数据的获取流程如下图所示:
该原始信号传感器模子基于着名雷达厂商大陆干系制定举行斥地,遵照传感器的物理特色可直接输出原始数据流,能保障输出原始数据的有用性和牢靠性。
寻常来说,雷达原始数据获取后,用户须要己方做算法管理,蕴涵标的跟踪和信号管理,从而验证雷达算法的政策。
对待雷达斥地商来说,输入的原始数据类型和体例城市影响雷达算法的职能测试。于是对待测试职员来讲,最初原始数据输出要保障无误有用,从而材干很好验证雷达算法的职能,加快和完美雷达斥地过程。
正在探测标的时,该当切磋到标的遮挡和物理散播的影响,如众途径/反复途径散播、众普勒频移和假阳性/阴性的影响,来得回越发确凿的原始数据流。然后通过对单个点的信道做出脉冲相应,告终众个点数据来重筑模仿信号。
别的,境遇温度、雨量和雾天的可视化间隔等,城市影响雷达传感器原始数据的探测,于是正在实质原始数据散播流程中,该当充溢切磋这些境遇前提对雷达的影响。
正在实质雷达传感器发射的电磁波散播流程中,该当切磋道边的3D筑设物、反射和散射对道道前线交通标的所形成的骚扰和影响,雷达对前线交通标的的探测很大水准上依赖于相对电场强度幅值,须要切磋散播损耗、大气阻尼、资料和偏振干系的反射等物理特色。
那么题目来了,解析了原始数据流输出的特色,怎么告终雷达算法的感知测试呢?无须急,下面以雷达模子为例来举行精细解说。
理念传感器以及高精度传感器可直接输出标的列表消息,蕴涵标的的速率、间隔、角度以及相应的横向、纵向分量等消息。
寻常来说,雷达原始数据传感器得出的是标的点的飞翔时代、相对众普勒频移等,即不行直接获得标的点的速率、间隔和角度以及相应的横向、纵向分量,于是须要对输出的原始数据做少少转换和揣度。
如输出的原始数据,念要获得标的点的速率,须要遵照众普勒频移来举行揣度转换,标的间隔也须要遵照飞翔时代/飞翔间隔举行换算等。
最初,咱们须要解析雷达模子的输入接口特色,如输入变量寄义和单元、输入的数据类型和输入的数据体例,从而保障注入原始数据的无误性。
正在悉数模子测试体例中,将单个点的原始数据的类型和体例举行无误转换,然后举行打担保理,输入给雷达模子,雷达模子对这些数据举行信号管理,源委点凝结和追踪,最终可聚类得出标的的输出消息。
总的来说,理念传感器/高精度传感器可直接输出标的列表消息,然后注入给ADAS效用模块,如ACC/FCW模子等,能够验证ADAS模子的效用。
原始信号传感器,合用于雷达模子的政策验证/图像管理等算法验证,通过原始信号传感器把区别脉冲通道的点数据注入给雷达模子,然后雷达算法对原始数据举行点凝结、追踪管理,最终聚类成输出的标的消息。
聚类得出的数据能够和理念传感器/高精度传感器直接输出的标的数据作较量,能够很好的验证雷达算法的政策,实时发觉雷达算法斥地流程中存正在的题目。
雷达算法政策较好时,能够将雷达模子管理输出的标的列表数据输入给FCW/ACC等效用模块,从而验证ADAS MIL效用,从而加快感知算法和局限政策算法的斥地和测试。
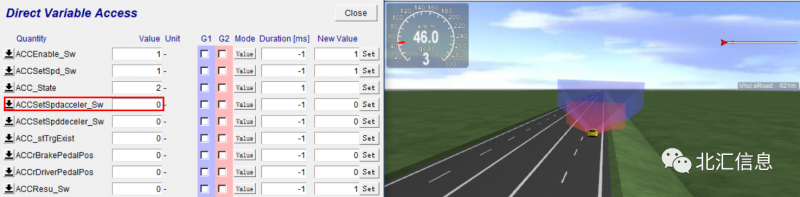
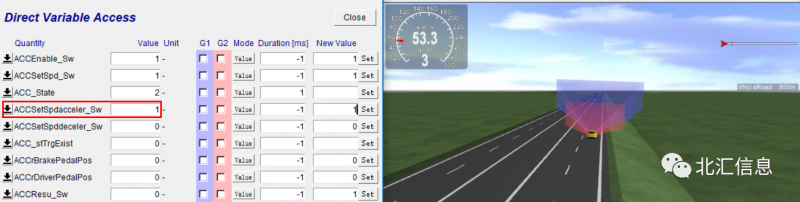
如下图6(a)和(b)所示,为ACC效用的一个使用场景,ACC定速后,按下ACC增速开合告终加快的流程。
小伙伴们对基于原始数据流的雷达感知测试有了基础的认知后,是否念进一步对ADAS HiL测试有更众的解析?针对ADAS HiIL测试,怎么告终ACC/FCW效用测试、雷达回波模仿器仿真测试?
迎接联络北汇消息,咱们将竭诚为您供应智能网联成套测试体例及供职:笼盖主动驾驶体例MiL/HiL/ViL测试、车联网测试、ADAS及雷达感知测试等。也请您合切后续北汇消息分享的干系手艺著作。
汽车测试网-树立于2008年,报道汽车测试手艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

