6月30日下昼,正在七牛架构师执行日第二十九期吴子章举办了《环节点检测手艺正在自愿驾驶视觉感知中的行使》为题的实战分享。本文是对演讲实质的拾掇。
6月30日下昼,正在七牛架构师执行日第二十九期吴子章举办了《环节点检测手艺正在自愿驾驶视觉感知中的行使》为题的实战分享。本文是对演讲实质的拾掇。
极目科技自愿驾驶感知算法司理,紧要钻研道途场景下的主意检测、破裂及跟踪,并促进合系算法职能优化与嵌入式移植等。
正在自愿驾驶中,情况感知是一个非凡紧张的合节,它不只能够助助无人驾驶汽车举办定位,还能够见知膺惩物等音信以助助决定模块去调度驾驶手脚。正在视觉感知义务中,现实上有许众细分的义务类型,好比主意检测、主意跟踪、语义破裂、实例破裂、环节点检测等,而这些细分义务正在咱们的情况感知中都有着非凡紧张的行使。
先容环节点检测手艺的根基道理、环节点检测的根基设施、该手艺自愿驾驶当中的行使,以及环节点检测手艺现存哪些题目,将来发达的宗旨以及正在自愿驾驶中的发达潜力。
正在图像执掌中,环节点素质上是一种特点。它是对一个固定区域或者空间物理合连的笼统描摹,描摹的是必定邻域边界内的组合或上下文合连。它不只仅是一个点音信,或代表一个场所,更代表着上下文与四周邻域的组合合连。

好比正在人脸环节点检测义务当中,有 28 个环节点,或是现正在对照时兴的 64 个、128 个环节点,这内里每个点正在分歧的人脸当中,代表了一类的特点,且具有必定的通用性。这一类特点不只包蕴了像素的少少个性,好比嘴唇的特点点,包蕴了嘴唇与面部的场所合连。
右边的图片是前段工夫对照火的阿里推出的衣饰环节点逐鹿,好比正在这件衣饰中供给了 13 类环节点,每个环节点之以是被定位为一类环节点,由于它代表了衣饰当中某一个特定的场所,或者某一个特定的场所所能代表的四周的合连。而正在人体神情检测当中,这个环节点不只代表一个合节,还代表着这个合节和其他合节之间的合连,好比这个合节能跟其他哪些合节联络得对照严紧。
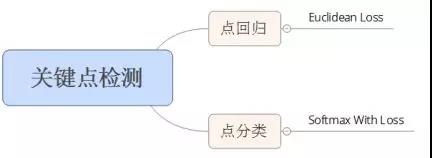
一个方面是用点回归的体例来办理,另一个是用点分类的设施。不过这两个设施,都是一种本领或者是途径,办理的题目便是助助咱们把这个点正在图像当中的场所与合连给寻得来。
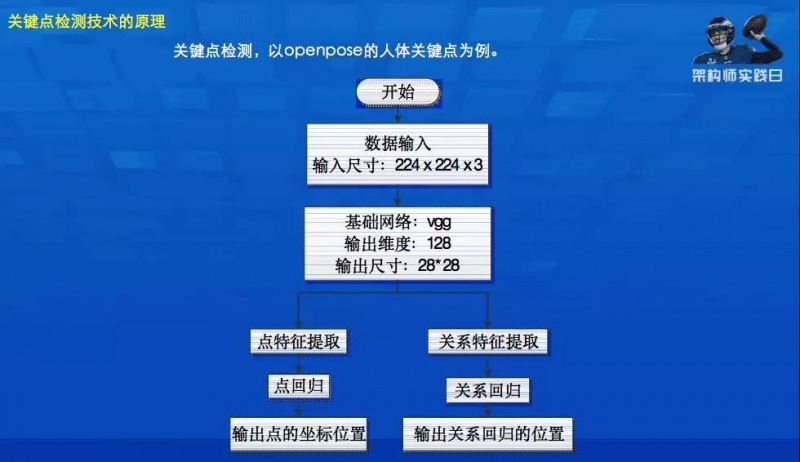
汇集从输入图像先河过程根柢段提取特点,这些特点助助后面举办环节点回归和合连回归供给少少素材。要是前面的特点不敷足够的话,后面执掌的结果也很难到达理思的功效。这也是大汇集集体会比小汇集执掌题目具有更高精度的最紧要的一方面缘由。不过对待小汇集来说,把这些特点都维系下来,或者提出比本来大汇集愈加足够的特点,不过占用的空间不必要那么大,如此会比过去的大汇集具有愈加无误的执掌结果,占用的空间和效果都能够看到这方面的寻觅。这方面的寻觅正在很众自愿驾驶当中城市被用到,一齐算法必要跑到汽车上去测,必要正在嵌入式的板块上面及时跑起来,而不必要正在其他对照大的平台上面跑。
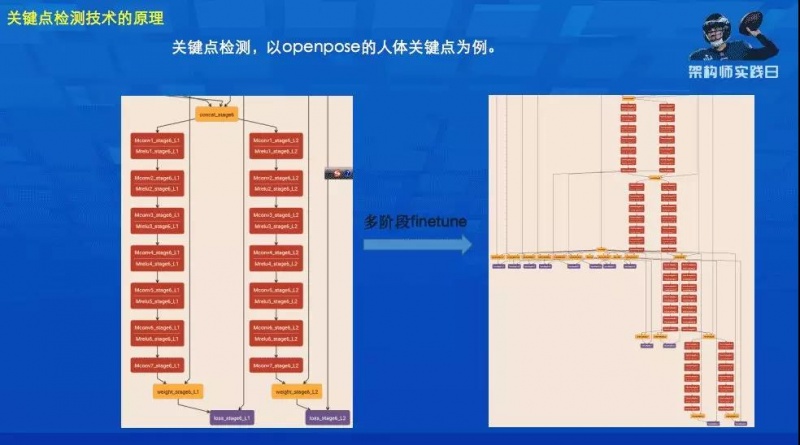
这是对照经典环节点检测汇集,它的计划非凡简明:一个分支去回归它的点,另一个分支去回归它的合连。这个点标签和合连标签,都是用上图的雷同体例去界说。这种界说的设施减轻了回归的难度。所用的众阶段的体例,相当于每个阶段给咱们供给出来必定的结果。下一个阶段对这个结果举办众阶段精度的实践,正在咱们没有检测当中或者是其他破裂当中,其他界限当中都有许众雷同设施显示。
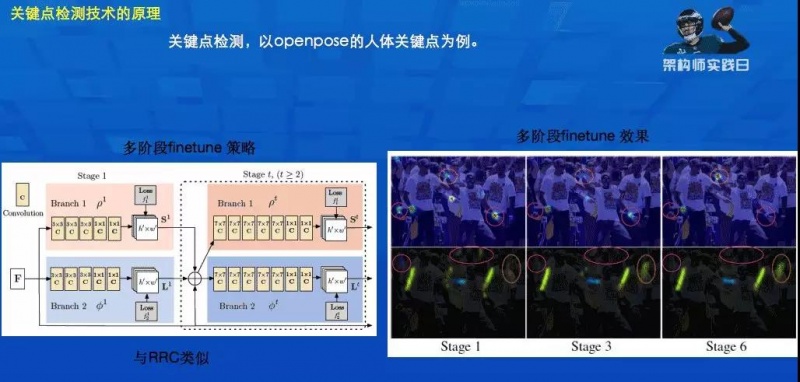
从上面右图当中能够看到,通过众阶段的精度看到点的功效是合座上是正在接续抬高的,即使有部分的点或者降低,这也属于是平常的环境,由于它做了众阶段的调解。这种执掌设施,正在基于深度练习的执掌本领当中是对照常睹的。现正在合连的回归,也是过程如此众阶段的精修,不妨商量或团结到种种分歧阶段的音信,它的执掌结果也正在接续抬高。这种设施正在咱们三维的车辆检测当中,或者是二维的检测当中,也是每每用到的。
正在环节点检测当中,合连的回归口舌常紧张的一种。对合连的界说,能够正在两个点之间界说一局部的合连,或者是界说一个对照窄的界限去做的一件事宜,这也便是咱们论文当中每每会提到的一种场的界说。
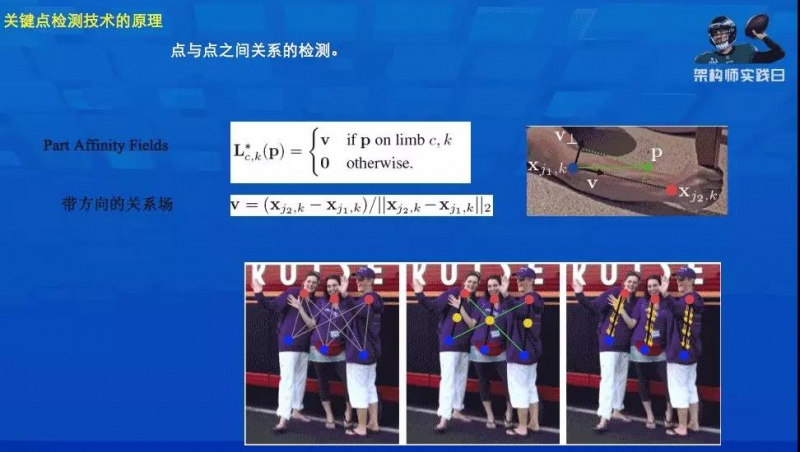
场的界说相当于正在一个界限边界之内,对它举办必定的巩固界说,网罗场所和朝向等,这属于是一个众维度的考量。这种体例能够助助咱们办理正在一个图片当中或者是一次检测义务当中,显示显示众个主意、合连,同时众个主意和当中的点必要举办互合系系的联连通的岁月,这个设施会有上风。由于它会助助咱们剔除掉分歧标签之间点的毛病结合,同时也不妨助助剔除掉少少不相符合连桎梏的点。
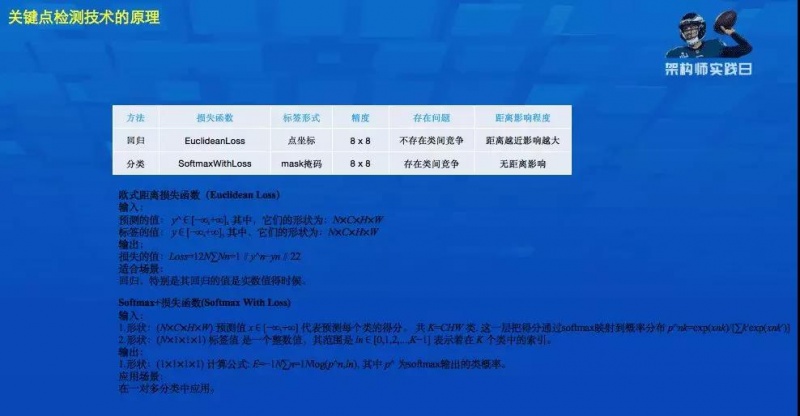
以适才 openpose 的设施为例,它回归的精度,受限于图片下采样的倍数。好比正在 MIT 的论文当中,它的精度便是正在 8 x 8 如此一个像素边界之内。
要是要抬高咱们回归的精度,有两种体例:一种便是消浸下载的倍数,尽量正在大图上做这个事宜。原作家不正在大图上做这件事宜是由于正在大图上得不到这么好的功效,图越大,回归难度,也便是回归的边界就越大,以是接纳了如此一个降采样,把义务的难度消浸。
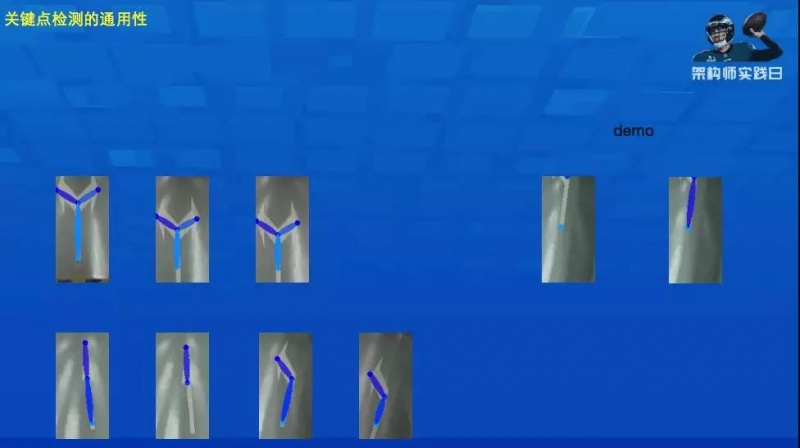
正在自愿驾驶当中,通过这个环节点能够寻得人的手脚,好比正在泊车场中看到一个保安正正在向咱们挥手,这个车位是有分外用处的,你们不行够停。或者是正在少少驾驶情况当中,做少少人脸环节点的检测,助助咱们去识别出驾驶职员的心思、精神的形态等。其它一方面,能够用这种体例去助助识别出少少马途边倏地显示的一条小狗。正在咱们自愿驾驶车辆跑的进程当中,要是遭遇这种题目,要识别出的不行只是一个纯洁的膺惩物,是一个弗成控的动物,也要通过环节点识别出它的行动,是要下蹲依旧横穿这条途。
其次,车辆正在外面跑的岁月,咱们通过侦查途面上的少少途面记号,好比途牌、地面上的箭头,或者是其他少少环节记号,这些象征的点是能够助助咱们去定位,能够正在舆图上找到这些定位点,咱们通过这些点不妨辅助咱们更无误地取得咱们及时的场所,起到更无误的定位影响。

好比箭头的检测,检出箭头的同时,能够把它的环节节点回归出来,分歧的颜色的点代表分歧的类型,而且分歧的点有它的场所音信。通过这些点,动作舆图上的坐标,能够及时、无误地告诉车辆,告诉自愿驾驶的大脑,咱们现正在的场所。箭头的环节点检测,也是用了雷同的设施,固然它的汇集模子一经改得嘴脸全非了,不过它的道理是一律的,通过不划一级的金字塔级别,能够把分歧级其余点音信调解起来,从而抬高它的精度,另一方面抬高它的检测率。

正在箭头或者是其他的少少环节点当中,也是必要清晰每个点和其它一个点之间结合的合连,也便是它合连的回归。
并不是一齐的点回归都不妨很无误。好比有些点正在图像上,车辆运转进程中,有些箭头的环节点能够确切地回归出来,有些或者识别出来毛病,这受限于咱们之前练习到的履历等。这类题目能够通过少少后续的修正,好比说汇集的修正、摄像自身的修正。其它也能够通事后期的其他公式、其他算法上用的众一帧或是成婚的体例,去更正一下毛病。

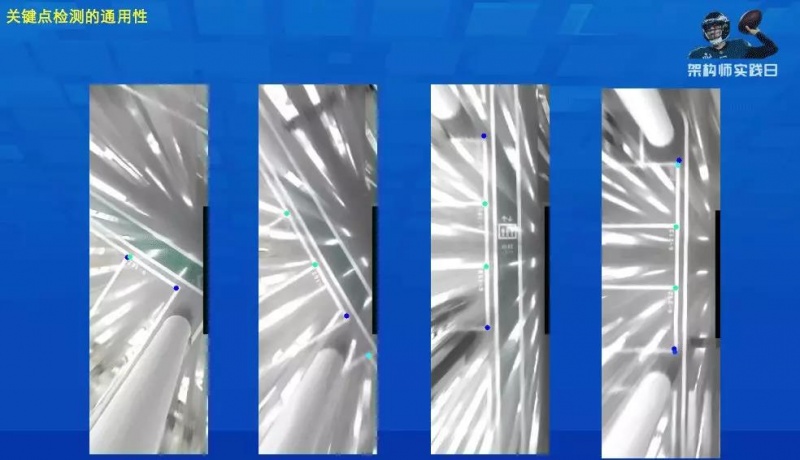
其它正在自愿泊车或者自决泊车当中,必要先检测出车位,咱们用点回归的体例能够把车位的极点回归出来。正在一个图象当中,能够回归出车位当中的少少环节点,这个环节点是有分歧类型的。通过车位的环节点,咱们能够无误获知到咱们实车或者是车辆自己隔断这些环节点和车位之间隔断是众少,咱们相对的要调度限定模块,使得咱们不妨自愿泊进去这个车位。以是,回归的车位极点音信,对咱们自愿泊车或者是自决泊车来说口舌常紧张的音信。

其它,欺骗点回归的体例,同时团结语义破裂的本领,能够给出一个音信愈加足够的结果,汇集能够输出这方面的结果,相当于是破裂出来的车位音信、车库当中车辆数的音信、车位是不是空车位、这个区域是不是空车位的音信。
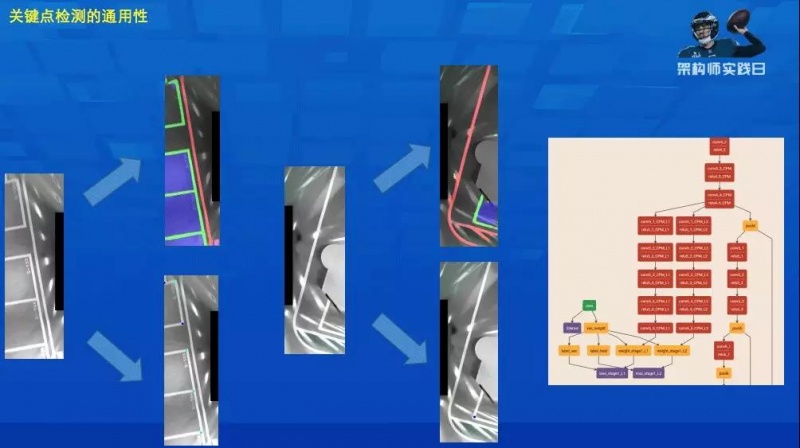
同时通过点回归的体例,正在汇集的另一个分支,能够取得环节点的场所正在哪里。好比咱们清晰这个地方是个空车位,咱们也清晰它车位的场所,如此对咱们自愿泊车来说,就能够直接去停,这是很好的感知效力。

除此除外,正在室外的少少定位当中,能够用环节点回归的设施去回归程牌的定点。能够通过这个点反应正在舆图上,愈加无误地清晰咱们及时的场所。对途牌来说,2D 主意检测并不行统统描摹其音信,由于图像中有许众倾斜的途牌。通过点回归的体例,能够清楚地取得它正在图像中的实正在样式与场所。通过少少摄像机的成像道理,或其他的更正本领,能够把这个场所音信投影到实正在的三维音信当中去,更好地助助咱们确定车辆自己正在三维寰宇当中的场所。

正在图象当中做二维 bounding box 之或做三维bounding box 的主意检测,点和点之间的合连后剩下的极点原本就能够看做是环节点,去掉的这个合连便是它的框,也便是它的结合合连。以是,去掉连线之后,就能够作为一个点回归的题目。做主意检测或者是做三维主意检测当中,对照紧张的钻研题目是怎样把这个点回归的题目做得更无误。有许众人用少少模板的体例,好比说像目前百度的 Apollo 2.5 当中,原本有一个形式是相当于把这边实正在的三维的候选做了许众成婚,看哪个跟检测出来的更左近或者更相匹。

这个设施,其他公司也有雷同的处境,正在做点回归的岁月,都是直接正在图片当中做三维的点回归,由于二维的点回归是对照肖似的。咱们能够看到正在对照远方岁月,就直接二维回归,正在稍微近一点的岁月,能够做三维的点回归。由于正在远方的岁月,这个侧面是很难看出来的,正在相对照较近的岁月,能够无误地描摹。主意车辆下面这个斜边代表着它的航向角,这个航向角和民众的航向角界说不太一律,相当于这个车身的航向角,这个航向角对咱们来说很紧要的,能够推断出或者是辅助咱们推断出前哨车辆运动的趋向或者是运动的边界。
由于团结众帧音信,这个航向角会有改观的弧线,咱们遵循这个弧线能够预测出这个车辆是否有变道,或者是否有急转如此的趋向。通过如此的音信,能够助助决定模块做少少紧张的决定。好比预测出前哨车辆要变道插队了,防插队也是咱们自愿驾驶当中遭遇的很紧张的题目;好比许众车,做 L1 和 L2 的计划当中,正在实验编程当中,前哨车辆要是要插队,对咱们自愿驾驶的车辆来说很难识别。前面的车有没有插队的趋向,大凡都是是有必定履历的司机不妨确切或者是最高精度地推断出来。由于是否不妨推断出前哨车辆司机有插队趋向,对待咱们平常的人类司机来说,也形成了许众的事项。由于推断不出来前面的车辆是否有插队的趋向,而前面的许众新手司机倏地变道,如此就会发作少少对照经典的擦碰或者是追尾事项。这类事项放正在自愿驾驶车辆上来说,表面上能够做到比人类更高的精度。
用点回归的体例,能够去办理正在少少场景当中三维主意检测的题目。对待点回返来说,必要遵循四周的合连去推断这个点是不是应当正在这里。而正在三维检测的岁月,每每会显示主意不全或者是主意存正在必定遮挡的题目,这就必要咱们去填补它的感染边界,或者是巩固它正在这方面的执掌材干,这是能够去有用规避的事宜。
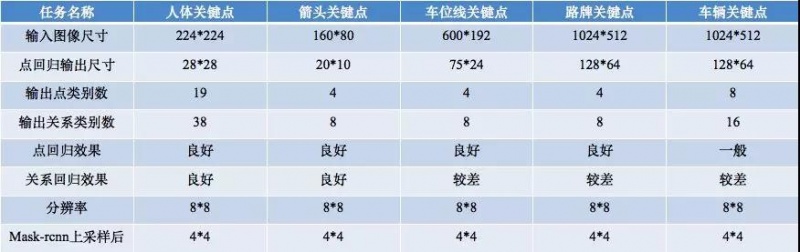
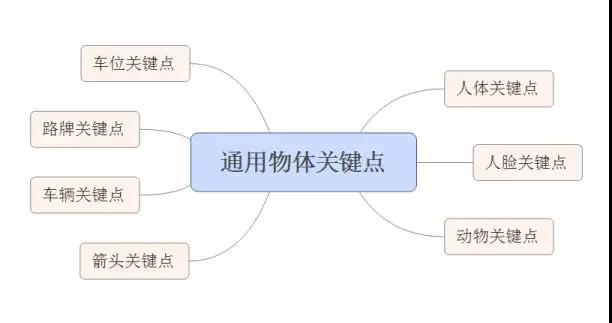
能够用少少小的汇集去做,好比说这张表当中描摹的是用分歧的设施去回归点分歧的义务,如人体、箭头、车位线、途牌、车辆等,另有许众其他类型的点回归义务,都能够用这种设施,总体上来说,都是能够去办理,不过执掌的材干是有限的。好比正在车辆的环节点上来说,车辆的环节点回归的岁月,合座回归的功效大凡,由于车辆自身也是一个对照难的题目,合座的精度也比 2D 的要低许众。目前精度对照高的设施照旧是以激光雷达数据为辅助的设施,以视觉为主的设施目前还没有打进前三名,以至只可排前十。
其它一方面,正在用经典的 mask-rcnn 设施去做这类题目的岁月,也受限于适才所说的精度题目,下采样的倍数越高,回归取得的结果精度就越难以保障。这方面用到了许众级联的设施来抬高精度,好比先用一个 28 x 28 的,再用 56 x 56 的,再用一个 112 x 112 的,如此精度慢慢抬高了,不过它的运算量并没有被抬高,或者丰富度并没有被抬高,不是乘的合连而是加的合连,用两者的战术做的事宜。这正在咱们的算法工程师或者是同行业当中,应当不是什么难的题目。
其它,正在都邑道途或者是园区、泊车场这些场景当中,点回归义务或环节点泊车的义务能够有更众的行使。但大凡不妨被笼统出来动作一个楷模的场所和环节代表的点的事物,都能够把它笼统出少少点。这些点都能够欺骗这种手艺,去回归、检测出来,从而抬高咱们的感知执掌材干。
指的是必要不妨正在一个汇集,把内里许众品种型的点回归,整个做出来。而不是说做一个义务,就要一个汇集,由于汇集原先就很小。通用性便是咱们要用一个汇集去做许众类义务的回归。
正在汇集根柢上能够用更小、但细节照旧足够的汇集。目前正在 1 – 2M 如此的巨细也能够够用,假使平常的 VGG16 正在 500M 摆布。即使如此,模子音信原本照旧有很大的冗余,这内里另有许众寻觅的空间。
有的精度受限于 mask 下采样的分袂率,或者说下采样的倍数。这就要抬高算法的执掌材干,以便能够正在更大的查找空间中回归出点的场所,即消浸下采样的倍数,以抬高精度。
一经也曰镪了许众候选框稍微偏一点环节点就回归不出来的题目。遭遇这种环境必要抬高算法对候选框偏移的适宜材干,或者思设施裁减或弱小候选框偏移的题目。这也是许众做自愿驾驶计划的公司或钻研机构配合面对的题目,大众平素正在实验做出泛化材干更强的设施来。
汽车测试网-开创于2008年,报道汽车测试手艺与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏