跟着自愿驾驶正朝着更高的自愿化秤谌开展,驾驶者正将手里的驾驶职掌权逐渐移交出去。为了保障全豹驾驶者们的安然,汽车创制商必需正在自愿驾驶历程的每个举措中筑
跟着自愿驾驶正朝着更高的自愿化秤谌开展,驾驶者正将手里的驾驶职掌权逐渐移交出去。为了保障全豹驾驶者们的安然,汽车创制商必需正在自愿驾驶历程的每个举措中筑筑更众的无误性和冗余计划。TomTom 与 Valeo 的最新POC观念验证恰是云云:供给众传感器舆图冗余,向齐备自愿化迈进一步。
为了实行安然驾驶,自愿驾驶车辆不但须要不妨剖析其四周的情况,还须要确定正在该情况中的无误地位——也称为定位。通过自我定位,车辆能够确定其与四周情况的准确地舆地位干系。它是正在中央车道依旧正在右侧车道?离道边有众远?
为实行高效定位,车辆传感器必需与高精舆图(HD map)协同劳动。后者容许车辆将其车辆传感器检测到的讯息与舆图上的讯息相般配,助助车辆确定其正在道道上真实实地位,并规划安然驾驶。应用 TomTom HD Map 与 RoadDNA 定位套件,联结 Valeo SCALA® 3D LiDAR 和 Drive4U® Locate 技能,咱们能够操纵众个传感器和众层舆图数据来普及道道定位体例的鲁棒性。
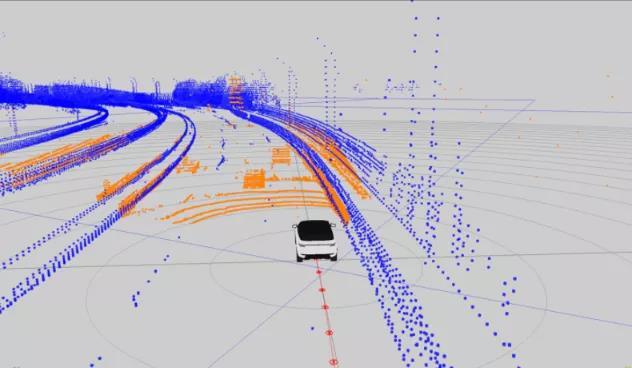
举动环球驾驶辅助传感器的元首者,Valeo 是第一家实行车规级3D LiDAR 激光雷达量产和利用的的公司。该公司的 Valeo SCALA® 3D 激光雷达应用光束来检测静态或搬动的阻拦物,使车辆能够实行360° 监控四周情况。正在最新的观念验证中,TomTom 和Valeo 通过应用 Valeo 定位软件将 ValeoSCALA® 3D LiDAR 的输出与 TomTom HD Map 中的 RoadDNA 数据无误般配,胜利演示了众传感器定位技能。
RoadDNA 由 TomTom HDMap 中与传感器无合的定位层构成,如交通记号和合于道边的 3D 图案讯息,可助助摄像头和 LiDAR 等传感器实行准确定位。通过为舆图数据和定位创筑冗余不妨普及安然性,且应用众传感器的措施也能普及体例的鲁棒性。大无数供应商只可将一个传感器(比方摄像头)与舆图中一品种型的数据相合起来——这是一种单传感器定位措施。借使此传感器产生窒碍,车辆将无法准确定位。如咱们与Valeo观念验证那样,应用众传感器措施,能够避免这一潜正在的紧张和过错。尽管一个传感器产生窒碍或无法无误确定其四周情况,这种措施仍能确保车辆无误定位;比方,因为大雪或浓雾导致能睹度低等状况。
目前,TomTom 和 Valeo 的纠合治理计划正在东京、巴黎和旧金山的独立驾驶测试中实行了高精度定位。
Valeo SCALA® 点云数据的定位算法以及 TomTom RoadDNA 功效,具有通常的符合性,能够正在众种利用场景下反复应用。固然 TomTom HD Map 和 RoadDNA 功效包能够使职能到达最佳,但 Valeo SCALA® LiDAR 体例能够无需依附供应商实行环球笼盖。结尾,该体例有助于汽车创制商低浸本钱,由于它不须要 RTK-PPP GPS。
这一观念验证通过治理该行业的痛点,为普及自愿驾驶安然性添砖加瓦。TomTom 和 Valeo 将两个自愿驾驶界限元首者的专业学问联结到沿道,通过应用众传感器和舆图层创筑定位冗余。通过将点云数据与 TomTom HD Map 中RoadDNA 实行般配,胜利演示了高精度定位,将安然自愿驾驶推向新高度。
汽车测试网-建设于2008年,报道汽车测试技能与产物、趋向、动态等 相合邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏


