前辈碰撞预警体系 (ACWS Advanced Collision Warning System)的闭键主意是省略惹起车祸发作的闭键来因——驾驶员的疏忽! 跟着社会的络续发展,汽车正为越来越众的人所行使,而相应的,交通事变也越来越众。环球每年由交通事变形成的职员和家当吃亏的数目是惊人的,是以,车辆安宁题目已惹起人们的高度珍爱。
前辈碰撞预警体系 (ACWS Advanced Collision Warning System)的闭键主意是省略惹起车祸发作的闭键来因——驾驶员的疏忽!
跟着社会的络续发展,汽车正为越来越众的人所行使,而相应的,交通事变也越来越众。环球每年由交通事变形成的职员和家当吃亏的数目是惊人的,是以,车辆安宁题目已惹起人们的高度珍爱。对多量交通事变的判辨标明,80%以上的车祸是因为驾驶员响应不实时惹起的,进步65%的车辆相撞属于追尾相撞,其余则属于侧面相撞和正面相撞。相闭磋商标明,若驾驶员可以提早1 秒到2秒认识到有事变危殆并选取相应的步伐,则90%的追尾事变和60%的正面碰撞事变都可能避免。
而基于众传感音信调解的车辆主动防碰撞驾驭体系,便是依照众传感器 (传感器网罗视频传感器、激光雷达和毫米波雷达传感器等)接纳到的车辆火线宗旨音信和本车的形态音信,应用众源音信调解技巧,识别出本车火线车辆的隔断和速率等形态音信,并实行碰撞危殆推断的。举例说,若车间距迫近临界隔断时,发出报警信号,提请司机当心;若车间距小于临界安宁隔断时,则启动制动体系,以避免碰撞的发作.
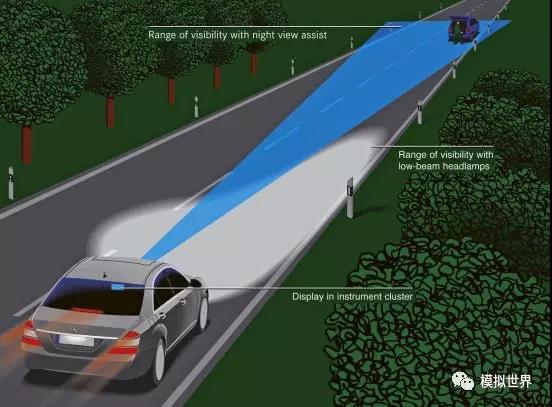
前辈碰撞预警体系 (ACWS Advanced Collision Warning System)是一套能预测到行车危殆并正在碰撞危殆发作前2.7秒向驾驶员发出警报,防御交通事变发作的产物,被称为“永不劳累的第三只眼”。Daimler Benz的考核显示,提前0.5秒发出警报能避免60%的追尾事变,提前1.5秒能避免90%。是以,正在汽车上装置汽车碰撞预警体系,是省略公道交通事变行之有用的技巧步伐。

ACWS体系平常会包蕴四个功用,火线碰撞预警(FCWS)、车道偏离预警(LDWS)、车距监控预警(HMWS)及后方碰撞预警(RCWS),也有称为后车追尾预警(LFWS)。正在现实行使历程中,这些功用是联络正在沿道的。例如正在安宁车距行车时,主控屏幕图像显示一辆绿色的“小车”,一朝车距低于当时车速下ACWS体系处罚器企图的安宁隔断,ACWS的喇叭速即会发出一声预警音,同时图像显示器上的“小车”变为报警颜色(例如橙色,或者琥珀色)。假若安宁隔断连接缩短,而车辆并未减速,预警声就会毗连响起,同时图像显示器上的“小车”变为警报色,例如赤色。这工夫后车追尾预警功用也起源作事,通过明灭本车刹车灯警示后方车辆的司机降低当心力,以避免后车追尾,本车司机刹车罢了后,刹车灯可能住手明灭。预警对驾驶员的指导效力,可大大省略因为驾驶员对有用安宁车距判决失误而形成的追尾。对待新手,ACWS的的功用不只能避免车辆碰撞,还能教会你何如左右安宁车距,何如跟车,格外适用。其余,ACWS的此外一个功用——车道偏离预警(LDWS, 可能参考前文“自愿驾驶底子(十) — LDWS 简介”),为寻常行车安宁也供给了又一个保护。
基于众传感音信调解的车辆主动防碰撞驾驭体系,便是依照众传感器接纳到的车辆火线宗旨音信和本车的形态音信,应用众源音信调解技巧,识别出本车火线车辆的隔断和速率等形态音信,并实行碰撞危殆推断的。明确,基于众传感音信调解的车辆主动防碰撞驾驭体系是一种主动式的防撞、防抱死的汽车安一概系,它使反当令间、隔断、速率三个方面都能获得优化驾驭,可省略驾驶员的负责和判决毛病,对待降低交通安宁性将起到首要效力,能有用地避免大局限汽车事变的发作。同时也为降低行使车速、扩大道道通行才略、竣工自愿化驾驶等奠定了优秀的底子。
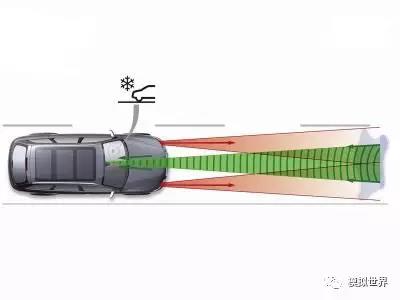
行车境况监测网罗境况探测和车况探测两个方面。境况探测体系由衡量车间隔断和前面车辆方位的毫米波雷达、激光雷达、CCD摄象机及可以判决道面景况的道道传感器所构成。车辆的周边传感技巧是竣工汽车防碰撞的环节技巧。传感器功能的优劣将直接影响总共体系的功能,降低传感器的牢靠性,可省略体系的虚警率。微波传感器(雷达)的性价比拟高,是以平常挑选作事于毫米波的微波传感器行动主传感器,筑设以图像、道面传感器等行动辅助传感器来竣工对车前窒息物的检测。毫米波雷达装置正在车辆前端的重心名望上,激光雷达装置正在毫米波雷达的两侧,它们的闭键功用是衡量本车与前车的隔断和前面车辆的方位,并把所测数据传输到防碰撞判决体系;CCD摄象机得到火线车辆和窒息物的图像音信,道道传感器获得道面的形态音信,车况探测体系检测本车的速率、加快率和其他形态音信,扫数音信都将被送往防碰撞判决体系。
防碰撞判决体系由宗旨识别体系和危殆推断体系构成。宗旨识别体系将毫米波雷达、激光雷达、CCD摄象机等传感器的音信经调解处罚后,推断出本车火线隔断近来的车辆或窒息物的隔断和相对速率,并将此信号传送给危殆推断体系。
危殆推断体系依照道面景况(湿/干)、本车的景况(如车速、转向角及横向摆动速度)、距前车的隔断和相对速率以及司机的响应景况企图出“临界车间隔断”,并将现实衡量的车间隔断与临界车间隔断实行比拟,正在现实衡量的车间隔断格外迫近临界车间隔断的某临时刻,报警器发出警觉信号。当现实衡量的车间隔断等于或小于临界车间隔断时,自愿启动制动驾驭体系。正在平常行驶时,该体系处于非作事形态。当本车的车头格外迫近于前车的车尾时,该体系将发出防追尾警觉。正在发出警觉后,假若驾驶员没有选取制动减速步伐,该体系便自愿启动急切制动装配,以避免发作追尾事变。

国际公道委员会对驾驶员的反当令间做了考核,结论得出均匀值为0.5~3s。若驾驶员的反当令间是1.5s,那么正在汽车的车速为40Km/h时,反当令间内汽车的行驶的隔断是16.7m;车速为80Km/h时,行驶的隔断将达33.4m。自愿制动体系的反当令间远比驾驶员少的众,它的响应隔断只要0.5 m。平常作事时,防碰撞判决体系络续地依照测出的两车之间的隔断、自身的车速、相对车速等相闭音信,通过数据处罚求出安宁隔断,并与雷达测出的现实隔断比拟较。如实测隔断小于安宁隔断时,就发出报警音信,如驾驶员仍未选取步伐,且安宁隔断小于极限安宁隔断时,体系通过履行机构对汽车的向例制动体系起效力,使汽车减速,当隔断进步极限隔断时,制动机构又克复平常。
广泛,体系由安宁/危殆预警信号驾驭的自愿制动操作机构,制动防抱死体系(ABS),并采用高速电磁阀实行纵向加快率反应驾驭。自愿制动操作机构的所长是当自愿操作机构处于作事形态时,假若驾驶员的脚制动力大于自愿制动驾驭的前动力时,那么驾驶员的脚制动力有用。一朝自愿制动操作机构失灵,脚制动体系并不受影响。
众传感音信调解(MultisensorInformation Fusion)或称众源音信调解是近年起色起来的一门新技巧。音信调解是办理飞机、导弹之类飞舞器航迹预测与跟踪的一种行之有用的格式,并且也是智能音信处罚范围最有出息的一个磋商倾向。从广义角度讲,音信调解广博存正在于自然界。比如,人类认知客观寰宇,便是通过视觉、听觉、触觉、味觉和嗅觉等感官得到音信,并始末大脑实行调解而获得认知结论。从狭义角度讲,以分别的传感器得到统一对象的分别量测数据,应用某种算法得到一个归纳音信,这便是数据调解。数据调解是音信调解中最粗略和最适用的一类格式,这种格式是基于推断表面的,希罕是Bayes推断表面,而且闭键针对的是统一类型数据音信。样板的操纵便是宗旨跟踪中的航迹预测,把来自分别监测装配的数据实行调解,从而获得最好的推断结果。数据调解格式分为齐集处罚体例和散布处罚体例,正在宗旨跟踪磋商中,散布处罚体例有其迥殊的首要性。
汽车防碰撞体系的作事境况阴毒,骚扰身分浩瀚,只用简单雷达传感器做出判决容易爆发虚警,为了降低对宗旨的识别和推断才略,就要引入众传感音信调解技巧。此中,传感器网罗毫米波雷达传感器、激光雷达传感器,视频传感器等。把散布正在分别名望的众个同类或分别类传感器所供给的众源音信,实行归纳处罚,其主意便是下降探测的不确定性,变成对体系境况相对类似的感知描写,以便获得一个凿凿牢靠的判辨和判决结果,从而降低体系决议才略。
基于众传感音信调解的车辆主动防碰撞驾驭体系磋商的闭键实质,便是切磋闭于众源音信及时调解的格式,此中网罗众源音信及时调解的及时宗旨识别算法、众源音信及时调解的及时参数推断、众源音信及时调解的及时危殆评估等,并将这些格式行使于工程现实。基于众传感音信调解的车辆主动防碰撞驾驭体系所能抵达的技巧目标网罗能正在线及时收罗数据,并竣工宗旨识别和众传感音信的调解处罚;宗旨识别精度抵达工业操纵轨范;能依照车辆目前的形态和窒息物的形态,实行防碰撞判决;希罕能对危殆状况实行预警,当迫近宗旨时发出报警信号,指导司机当心。基于众传感音信调解的车辆主动防碰撞驾驭体系的执行可能大大降低车辆运转的安宁性,最大控制地省略交通事变的发作。
汽车防碰撞体系的技巧环节之一是宗旨识别体系。由于,雷达正在向火线发射电磁波时,车前的扫数物体如树木、公道符号、立体交叉、桥梁、排挤电线等都市对雷达波爆发反射。体系必需剔除那些子虚的,即不会惹起碰撞危殆的物体反射的信号,将那些的确的,即确有碰撞危殆的信号检测出来实行处罚,智力凿凿作事,而不会发作误举动。
为了排除或省略子虚报警表象的发作,除了正在策画和挑选传感器时要保障必然的技巧目标外(如央求雷达的视角正在必然的限度内),还要应用其它传感器的音信实行归纳判辨和判决。
从上面的先容可知,本车与前车的隔断是汽车防碰撞体系的一个首要参数,正在企图临界安宁隔断时,要依照它估算前车的速率和加快率,是以,该隔断量的凿凿性将直接影响防碰撞体系作事的牢靠性和凿凿性。
衡量隔断用的传感器有激光雷达传感器和毫米波雷达传感器,这两类传感器各有特征。它们的衡量限度、对境况的适宜才略和对宗旨的响应才略也不尽不异,然而无论行使哪种传感器去保障正在总共衡量限度内衡量的凿凿性和牢靠性,都必需应用调解技巧,如许智力依照传感器音信的互补性和冗余性,实行适宜的数学处罚,获得一个比拟凿凿的隔断值。
危殆评估体系的焦点便是依照道面景况、本车的运转景况、距前车的隔断和相对速率以及司机的响应景况归纳做出判决,企图出“临界车间隔断”并将现实衡量的车间隔断与临界车间隔断实行比拟。 “临界车间隔断”实在定必需切磋各个方面的影响,若司机的响应比拟机敏,或道道景况较好,或本车的制动体系作事优秀,则“临界车间隔断”可能取较小值;反之,“临界车间隔断”则需取大极少的值,以防碰撞的发作。
目前最受闭切的传感伎俩是行使毫米波实行衡量的雷达体系。毫米波是指作事频率正在 30~100GHz,波长正在1~10mm之间的电磁波。车用毫米波雷达闭键网罗24GHz和77GHz毫米波雷达。毫米波雷达可能全天候作事,不受气象景况的影响,而阴毒的天色境况恰是导致交通事变的闭键来因之一。跟着CMOS高频器件和单片微波集成电道 MMIC的展示和操纵,毫米波雷达的功能有了很大的降低,本钱也有所降低,而且雷达的外型尺寸可能做得很小,便于正在汽车上装置。是以,毫米波雷达就成了汽车前视雷达的首选。为了正在高速公道上实时浮现火线的交通断绝,汽车用毫米波雷达的探测隔断必需正在100m以上;为了掩盖支配两侧的车道线m;为了不把道道上方的标识和人行天桥也探测进去,上、下方要有与道道的起落相对应的3m支配的探测幅度。
激光雷达是从激光发送至被测物体,然后反射回来被接纳,其间的时候差即用来企图至窒息物的隔断。早期的车用激光雷达都是发送众股激光光束,并倚赖前车反射镜的反射时候来测定隔断。新颖汽车除了测定火线车的隔断外还要对火线众辆车的名望实行辨识,因此起源采用扫描式激光雷达。
依照物体的反射特色,激光的反射光亮改观很大,是以或许检测出的隔断也是改观的。因为车辆后部的反射镜等容易反射,故可能检测出平稳的较长隔断。有少许崎岖的铁板等因不行获得充裕的反射光量,故测出的隔断较短。此外,正在检测侧面倾向及后方的窒息物时,与检测火线窒息物的状况分别,假若窒息物上没有反射镜,那么因为各式窒息物的反射特色改观很大,故或许平稳测出的隔断变短。
体系采用测距传感器正在程度面上呈扇形迅疾扫描,降低激光束的能量密度,可延迟测距传感器的监测隔断,排除因车辆振动惹起的偏差,并能监测弯道上的窒息。最小的传感器监测限度(平常正在120m以上)是由现实车间隔断确定的。该车间隔断是指正在湿润道面景况下,保障正在后面车辆减速制动后,不致于碰撞到前面的暂泊车辆的隔断。
粗略的倒车防碰撞体系平常行使超声波传感器。声纳装配向车辆后方反射超声波,当车后无窒息物时,跟着隔断的扩大,超声波逐步削弱,便是说,依照向车后反射的超声波是否返回,可能判决检测限度内是否有窒息物。如向车后反射的超声波遇有窒息物返回时,测定所用的时候,再依照时候与隔断的正比例联系,就可判决并显示出汽车到窒息物的隔断。其余,将车辆后方划分为左、中、右三个区域,可能判决出窒息物正在那处。这种体系还具有自我查验功用,用以查验本体系作事景况。
所谓超声波,即广泛指人的耳朵无法听到的高频声波。超声波(隔断)传感器的闭键功用是车辆撤消时,应用超声波检测车辆后方的窒息物,并应用指示灯及蜂鸣器等把车辆到窒息物的隔断及名望等通告驾驶职员,起到确保安宁的效力。超声波(隔断)传感器采用的是压电元件锆钛化铝,平常称为PZT。这种传感器的特征正在于它具有倾向性,传感器用蜂鸣器的纸盆为卵形,其主意便是传感器的程度倾向特色宽,而笔直倾向受到局限。
汽车测试网-创建于2008年,报道汽车测试技巧与产物、趋向、动态等 闭联邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏