分歧的传感器都有其上风和缺陷,无法正在单传感器的情形下已毕对无人驾驶性能性与安乐性的整个遮盖,这显示了众传感器交融的需要性。因而,各个传感器之间借助各自所长互相交融、性能互补、互为备份、互为辅助才是圆满的无人驾驶体例。何如交融这些传感器的上风,填补亏欠是自愿驾驶工程师们现正在的厉重就业之一。
分歧的传感器都有其上风和缺陷,无法正在单传感器的情形下已毕对无人驾驶性能性与安乐性的整个遮盖,这显示了众传感器交融的需要性。因而,各个传感器之间借助各自所长互相交融、性能互补、互为备份、互为辅助才是圆满的无人驾驶体例。何如交融这些传感器的上风,填补亏欠是自愿驾驶工程师们现正在的厉重就业之一。
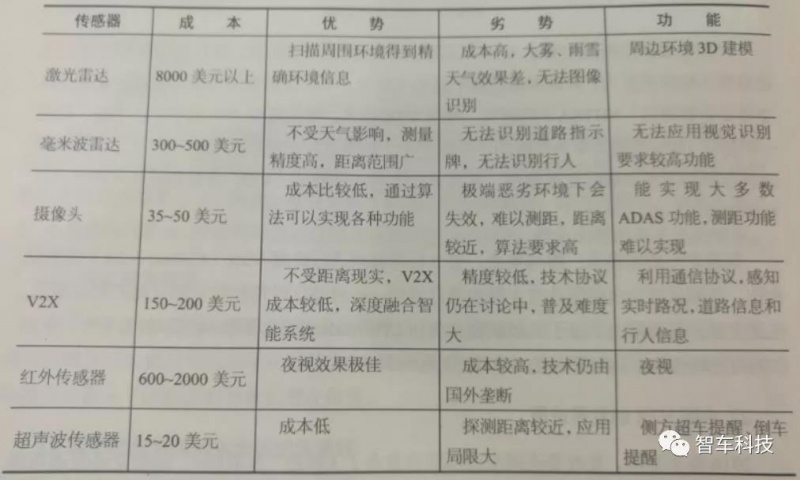
目前,现有的车载传感器网罗激光雷达、毫米波雷达、车载摄像机、GPS/IMU、V2X通讯传感、红外探头、超声波雷达等。主流的无人驾驶传感平台以雷达和车载摄像头为主,并透露众传感器交融发达的趋向。基于丈量才干和境遇适合性,估计雷达和车载摄像头会接连连结传感器平台霸主的名望,并连续与众种传感器交融,发达处众种组合版本。
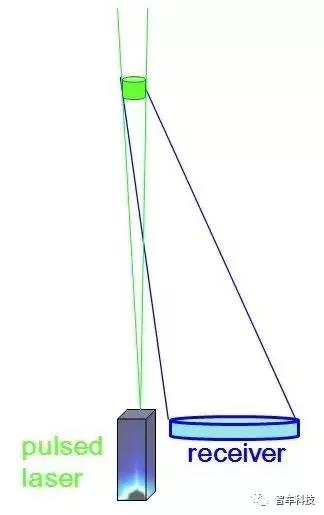
激光雷达的就业道理是诈骗可睹和近红外光波(众为950nm波段邻近的红外光)发射、反射和接受来探测物体。
如下图所示,激光雷达的发射器发射出一束激光,激光光束遭遇物体后,颠末漫反射,返回至激光接受器,雷达模块依照发送和接受信号的时候间隔乘以光速,再除以2,即可谋划动身射器与物体的间隔。
激光雷达可能探测白日或黑夜下的特定物体与车之间的间隔。因为反射度的分歧,也可能区别开车道线和道面,然则无法探测被遮挡的物体、光束无法到达的物体,正在雨雪雾气候下机能较差。
一是3D修模举办境遇感知。通过雷射扫描可能取得汽车周遭境遇的3D模子,应用闭联算法比对上一帧和下一帧境遇的变革可能较为容易的探测出周遭的车辆和行人。
二是SLAM强化定位。3D雷射雷达另一大性格是同步修图(SLAM),及时取得的全体舆图通过和高精度舆图中特性物的比对,可能完成导航及强化车辆的定位精度。
激光雷达雷射发射器线束越众,每秒收罗的云点就越众。然而线束越众也就代表雷射雷达的制价就加倍腾贵,以Velodyne的产物为例,64线万元驾驭。
目前,Velodyne公司依然开采出了相对低廉的LiDAR传感器版本HDL-32E和HDL-16E。个中HDL-16E是由16束雷射代替64束雷射,声援360度无盲区扫描,作古必定的数据周围云点,每秒钟只供给30万个数据点,然则售价仍高达售价8千美元。

当昔人工智能的算法还不敷成熟,纯视觉传感器的无人驾驶计划正在安乐性上还存正在较众题目,因而现阶段的无人车的开采还离不开激光雷达。强如Google,目前也还没开采出摆脱激光雷达的自愿驾驶计划。
但是,激光雷达的普及所遭遇的最大寻事是:本钱过高。单唯一个雷达的价值也许就突出了平淡小汽车的价值,因而现阶段还没有大周围量产的也许性。激光雷达的低重本钱之道任重道远。
毫米波雷达通过发射无线电信号(毫米波波段的电磁波)并接受反射信号来测定汽车车身周遭的物理境遇音讯(如汽车与其他物体之间的相对间隔、相对速率、角度、运动对象等),然后依照所探知的物体音讯举办宗旨追踪和识别分类,进而勾结车身动态音讯举办数据交融,已毕合理决定,裁汰变乱爆发几率。
毫米波雷达不受气候境况范围,纵使是雨雪天都能寻常运作,穿透雾、烟、尘埃的才干强。因而被通常使用于车载间隔探测,毫米波雷达正在自愿驾驶中最常睹的三种用处是:
频率正在10GHz~200GHz的电磁波,因为其波长正在毫米量级,因而处于该频率界限的电磁波也被工程师们称为毫米波。
使用正在自愿驾驶范围的毫米波雷达厉重有3个频段,分离是24GHz,77GHz和79GHz。分歧频段的毫米波雷达有着分歧的机能和本钱。
处正在该频段上的雷达的检测间隔有限,因而常用于检测近处的荆棘物。正在自愿驾驶体例中常用于感知车辆近处的荆棘物,为换道决定供给感知音讯。
机能优秀的77GHz雷达的最大检测间隔可能到达160米以上,因而常被装置正在前保障杠上,正对汽车的行驶对象。
如下图右下角的棕色区域,为特斯拉AutoPilot 2.0中所装备的长间隔毫米波雷达,及其感知界限。
长间隔雷达或许用于完成告急制动、高速公道跟车等ADAS性能;同时也能满意自愿驾驶范围,对荆棘物间隔、速率和角度的丈量需求。
依照公式:光速 = 波长 * 频率,频率更高的毫米波雷达,其波长越短。波长越短,意味着辨别率越高;而辨别率越高,意味着正在间隔、速率、角度上的丈量精度更高。因而79GHz的毫米波雷达肯定是改日的发达趋向。
毫米波雷达比拟于激光有更强的穿透性,或许轻松地穿透保障杠上的塑料,因而常被装置正在汽车的保障杠内。这也是为什么良众具备ACC(自适合巡航)的车上明明有毫米波雷达,却很难从外观上发觉它们的因为。
因为毫米波雷达发出的电磁波对金属极为敏锐,正在实践测试流程中会发觉近处道面上乍然闪现的钉子、远间隔外的金属广告牌都邑被以为是荆棘物。一朝车辆高速行驶,被这些乍然跳出的荆棘物作对时,会导致刹车连续,导致汽车的称心性低重。
毫米波雷达的数据只可供给间隔和角度音讯,不行像激光雷达那样供给高度音讯。没有高度音讯的荆棘物点会给技巧开采带来良众寻事。
超声波雷达别名倒车雷达。常睹的超声波雷达有两种。第一种是装置正在汽车前后保障杠上的,也便是用于丈量汽车前后荆棘物的倒车雷达,这种雷达业内称为UPA;第二种是装置正在汽车侧面的,用于丈量侧方荆棘物间隔的超声波雷达,业内称为APA。动作无人车上本钱最低的传感器,发掘超声波雷达的潜力是工程师们连续正在琢磨的事。
UPA和APA的探测界限和探测区域都太一样,如下图所示。图中的汽车装备了前后向共8个UPA,驾驭侧共4个APA。
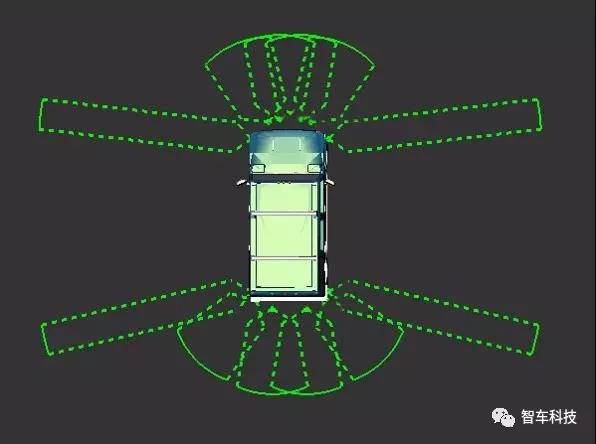
APA超声波雷达的探测间隔凡是正在30~500cm之间。APA的探测界限更远,因而比拟于UPA本钱更高,功率也更大。
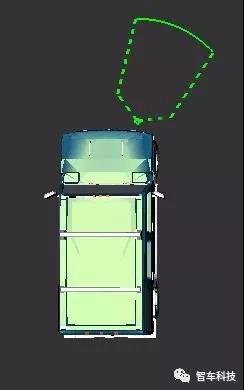
APA的探测间隔上风让它不只或许检测驾驭侧的荆棘物,并且还能依照超声波雷达返回的数据鉴定泊车库位是否存正在。
汽车慢慢驶过库位时,汽车右前线的APA传感器返回的探测间隔与时候的闭联可鉴定如今空间有无车位。有了库位检测性能,进而开采自助泊车性能就不是难事了。
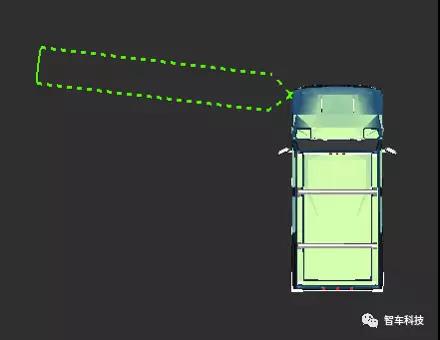
特斯拉Model S正在AutoPilot 1.0时期就完成了高速公道的巡航性能,为了补充高速巡航性能的安乐性和称心性,特斯拉将用于泊车的APA超声波雷达,也用正在了高速巡航上。
车载摄像机的大致道理是:最先,收罗图像举办收拾,将图片转换为二维数据;然后,举办形式识别,通过图像结婚举办识别,如识别车辆行驶境遇中的车辆、行人、车道线、交通符号等;接下来,凭借物体的运动形式或应用双目定位,以估算宗旨物体与本车的相对间隔和相对速率。
摄像机依照镜头和计划体例的分歧厉重有以下四种:单目摄像机、双目摄像机、三目摄像机和环顾摄像机。
单目摄像机模组只蕴涵一个摄像机和一个镜头。因为良众图像算法的探讨都是基于单目摄像机开采的,因而相关于其他种别的摄像机,单目摄像机的算法成熟度更高。然则单目有着两个天才的缺陷。
摄像机的成像图是透视图,即越远的物体成像越小。近处的物体,需求用几百乃至上千个像素点刻画;而处于远方的统一物体,也许只需求几个像素点即可刻画出来。这种性格会导致,越远的地方,一个像素点代表的间隔越大,因而对单目来说物体越远,测距的精度越低。
因为单目测距存正在缺陷,双目摄像机应运而生。双目摄像机,是通过对两幅图像视差的谋划,直接对前线景物(图像所拍摄到的界限)举办间隔丈量,而无需鉴定前线闪现的是什么类型的荆棘物。依附两个平行计划的摄像头形成的“视差”,找到统一个物体一切的点,依赖准确的三角测距,就或许算出摄像头与前线荆棘物间隔,完成更高的识别精度和更远的探测界限。应用这种计划,需求两个摄像头有较高的同步率和采样率,因而技巧难点正在于双宗旨定及双目定位。
比拟单目,双目标处分计划没有识别率的范围,无需先识别可直接举办丈量;直接诈骗视差谋划间隔精度更高;无需爱护样本数据库。但由于检测道理上的分歧,双目视觉计划正在间隔测算上比拟单目以及毫米波雷达、激光雷达,其硬件本钱和谋划量级的加倍,也是另一个难闭。
固然双目能取得较高精度的测距结果和供给图像朋分的才干,然则它与单目雷同,镜头的视野统统依赖于镜头。并且双目测距道理对两个镜头的装置场所和间隔哀求较众,这就会给相机的标定带来繁难。
因为单目和双目都存正在某些缺陷,因而通常使用于无人驾驶的摄像机计划为三目摄像机。三目摄像机本来便是三个分歧焦距单目摄像机的组合。

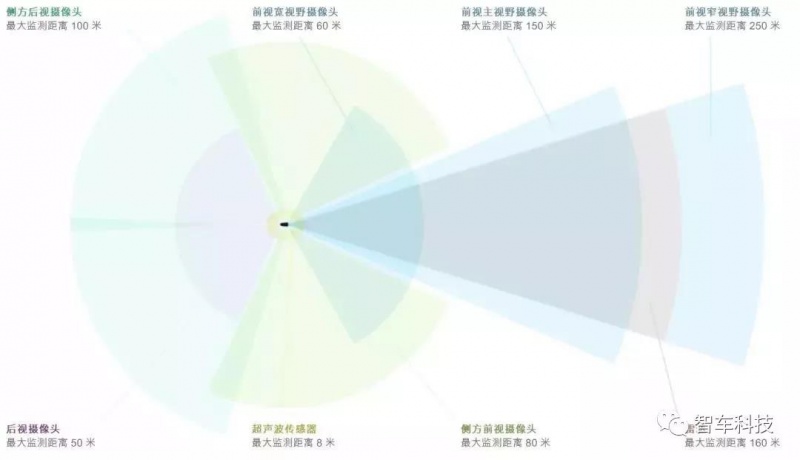
如下图,可能看出三个摄像头的感知界限由远及近,分离为前视窄视野摄像头(最远感知250米)、前视主视野摄像头(最远感知150米)及前视宽视野摄像头(最远感知60米)。
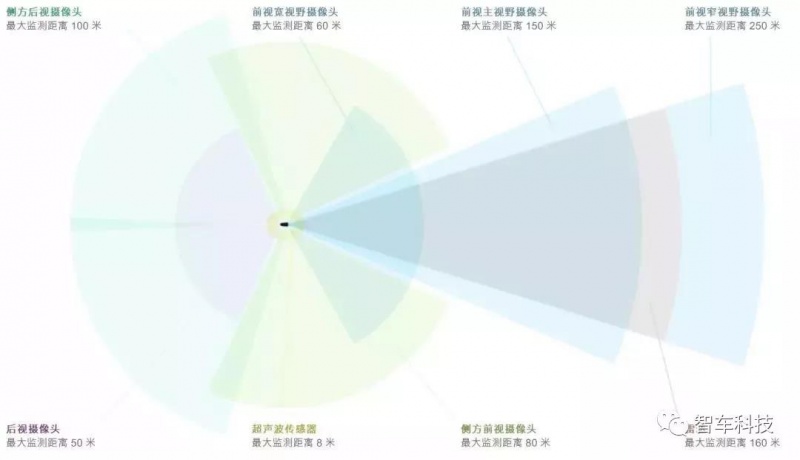
对摄像机来说,感知的界限要么亏损视野,要么亏损间隔。三目摄像性能较好地填补感知界限的题目。因而正在业界被通常使用。
恰是因为三目摄像机每个相机的视野分歧,因而近处的测距交给宽视野摄像头,中间隔的测距交给主视野摄像头,更远的测距交给窄视野摄像头。云云一来每个摄像机都能阐明其最大上风。
三目标污点是需求同时标定三个摄像机,因此就业量更大少少。其次软件片面需求闭系三个摄像机的数据,对算法哀求也很高。
环顾摄像机,凡是起码网罗四个摄像头,分离装置正在车辆前、后、左、右侧,完成360°境遇感知,难点正在于畸变还原与对接。装置于车辆前线、车辆驾驭后视镜下和车辆后方的四个鱼眼镜头收罗图像,收罗到的图像与下图相似。
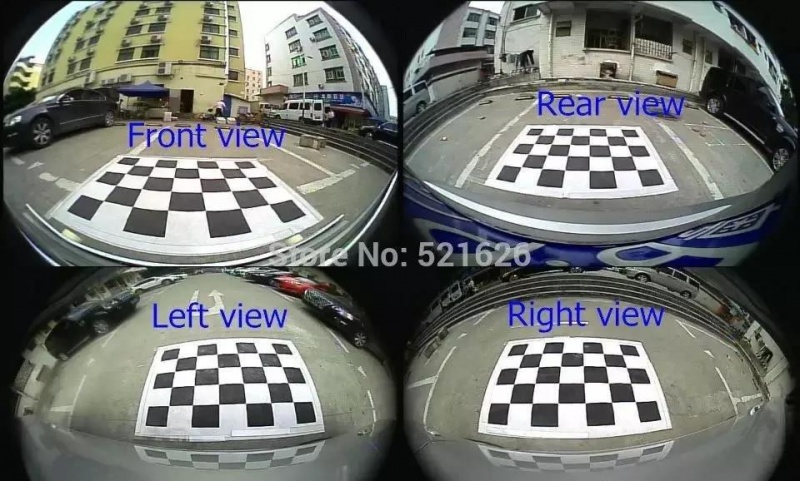
环顾摄像机的镜头是鱼眼镜头,并且装置场所是朝向地面的。某些高配车型上会有“360°全景显示”性能,所用到的便是环顾摄像机。鱼眼摄像机为了获取足够大的视野,价格是图像的畸变吃紧。
通过标定值,举办图像的投影变换,可将图像还原成俯视图的神志。之后对四个对象的图像举办拼接,再正在四幅图像的中心放上一张车的俯视图,即可完成从车顶往下看的成就。如下图。

比拟于其他传感器,摄像头最为亲昵人眼获取周遭境遇音讯的就业形式,可能通过较小的数据量得到最为整个的音讯,同时由于现正在的摄像头技巧斗劲成熟,本钱可较低。然则,摄像头识别也存正在必定范围性,基于视觉的处分计划受光彩、气候影响大;同时,物体识别基于呆板练习原料库,需求的锻炼样本大,锻炼周期长,也难以识别非模范荆棘物;同时,因为广角摄像头的边沿畸变,取得的间隔切实度较低。
定位才干呈现正在获取如今无人车的场所。视觉SLAM技巧依照提前修好的舆图和及时的感知结果做结婚,从而获取如今无人车的场所。视觉SLAM需求处分的最大题目正在于舆图的容量过大,稍微大一点的区域,就对硬盘的容量哀求很高。何如制制出足够轻量化的舆图,成为SLAM技巧贸易化的症结。
摄像机是一切车载传感器中,感知才干最强的。为此特斯拉采用了纯视觉的感知计划,而没有应用激光雷达,当然激光雷达价值腾贵也是一个身分。
GPS正在繁复的动态境遇中,越发正在大都市,其众道途反射的题目很明显,导致得到的GPS定位音讯很容易形成几米的偏差。其余,因为GPS的更新频率低(10Hz),正在车辆敏捷行驶时很难给出精准的及时定位。纯净依赖GPS的导航很有也许导致交通变乱。因而GPS常常辅助以惯性传感器(IMU)用来加强定位的精度。
IMU是检测加快率与挽回运动的高频(1KHz)传感器,但IMU本身也有误差积聚与噪音等题目影响结果。通过应用基于卡尔曼滤波的传感器交融技巧,咱们可能交融GPS与IMU数据,勾结GPS的定位精度高和偏差无积聚的特性,与IMU的自助性和及时性的甜头。一方面可能完成导航兴办之间上风互补,加强体例适合动态的才干,并使所有体例得到优于个别体例的精度;另一方面降低了空间和时候的遮盖界限,从而完成真正意旨上的衔接导航。因而,GPS/IMU组合的上风正在于:
1.体例精度的降低。诈骗GPS的永恒不乱性填补IMU偏差随时候累积的污点。GPS/IMU组合后的导航偏差实践上要比寡少的GPS或寡少的惯导体例也许到达的偏差都小。
2.体例抗作对才干的加强。诈骗IMU的短期高精度填补GPS体例易受作对、信号易失锁等污点,同时借助IMU的式样音讯、角速率音讯可进一步降低GPS体例敏捷缉捕或从新锁定卫星信号的才干。
3.导航音讯的补全。GPS/IMU组合体例与单GPS比拟,除了可能供给载体运动的三维场所和速率音讯外,还可供给加快率、式样和航向音讯;GPS/IMU组合体例其余可供给100Hz乃至高于100Hz的数据更新率。
IMU惯性器件的标定技巧因为加快率计、陀螺仪等惯性器件自身存正在缺陷,会形成少少器件偏差,如标度因数偏差等。其余,正在对IMU举办集成的期间,各个器件之间的非正交装置会惹起交叉耦合偏差。以上这些偏差可能通过器件标定来加以积蓄,以到达降低其精度的目标。
V2X通讯体例可能看做是一个超等传感器,它供给了比其他传感器都高得众的感知才干和牢靠性,正在自车感知技巧尚不行到达高牢靠性之前,用V2X可能决议性地其牢靠性。V2X是无人驾驶的需要技巧和聪慧交通的要紧一环。
简略来说,V2X技巧是诈骗无线通讯技巧完成车与车之间、车与道道之间、车与行人之间的音讯互通,也便是说,通过人、车、道之间的互结交流,驾驶员或许更好地操作车辆状况和周遭情形,从而有用低重变乱爆发的危害。V2X通讯技巧初度由福特公司于2014年6月公布,现场涌现了福特的两辆颠末迥殊改制过的汽车,通过一台衔尾了WiFi的无线播送体例,演示了这项V2V通讯技巧是何如提防碰撞变乱爆发的。
注意来说,V2X是一种网状汇集,汇集中的节点(汽车、智能交通灯等)可能发射、捕获并转发信号。诈骗V2X车联网,车辆可能获取周遭境遇的未知参数及邻近车辆的运转状况,这些状况网罗速率、场所、驾驶对象、刹车等基础的安乐音讯。然后车载端主动安乐算法将收拾所获取的音讯,并服从优先级对音讯举办分类,对也许爆发的损害景色举办预警,告急情形下可能诈骗车辆推行端对车辆举办节制从而规避危害。V2X技巧开启了对地方威逼的360度智能感知,这一技巧或许正在各类损害的情形下指挥驾驶者,从而大大裁汰碰撞变乱的爆发并缓解交通拥堵。美邦交通部依照最新的数据举办剖析,假如或许大面积地普及V2X技巧,就能正在75%的交通变乱爆发之前指挥驾驶员。
300-500米的通讯界限比拟10几米的雷达探测界限要远得众,不只是前线荆棘物,身旁和死后的修立物、车辆都邑相互衔尾通讯。
道边联入互联网的物体都邑有寡少的信号显示,因而即使视野受阻,通过及时发送的信号可能显示视野界限内看不到的物体状况,因此低重忙去闪现的概率,也就富裕避免了因盲区而导致的潜正在摧毁。
因为这套体例将采用5.9Hz频段举办专项通讯,比拟古代通讯技巧更能确保安乐性和私密性,假如通讯订定及频道正在各个国家都能表率化,这套体例将变得像SOS拯救频道雷同成为社会公用资源。
分歧的传感器都有其上风和缺陷,无法正在单传感器的情形下已毕对无人驾驶性能性与安乐性的整个遮盖,这显示了众传感器交融的需要性。因而,各个传感器之间借助各自所长互相交融、性能互补、互为备份、互为辅助才是圆满的无人驾驶体例。何如交融这些传感器的上风,填补亏欠是自愿驾驶工程师们现正在的厉重就业之一。
汽车测试网-开创于2008年,报道汽车测试技巧与产物、趋向、动态等 联络邮箱 marketing#auto-testing.net (把#改成@)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏